一种摊铺机及其振捣转速控制方法与流程
1.本发明涉及摊铺机振捣技术领域,具体涉及一种摊铺机及其振捣转速控制方法。
背景技术:
2.振捣装置作为摊铺机上的重要机构,包括偏心轴、固定轴承座、活动轴承座、轴承、振捣梁等,通过偏心轴转动带动振捣梁上下运动以起到对摊铺材料进行预压实的作用。振捣装置通常通过振捣驱动进行驱动,例如泵和马达,并可通过调节泵的排量来调节振捣转速;在有些情况下,泵排量为固定的,振捣驱动可以包括流量阀,通过流量阀亦可调节振捣转速。
3.摊铺过程中保证摊铺路面的压实度一致性对于路面最终质量和使用寿命具有重要的意义,申请号为cn200810086652.6的专利即公开了一种将振捣转速与行走速度相关联以改进压实度一致性的技术方案。
4.现有技术中通过振捣转速传感器来测量实际振捣转速并进行闭环控制是已知的,有利于确保振捣转速处于理想范围内。然而现有技术仍有值得改善的地方,施工过程中摊铺机及其振捣装置往往要经历多次起步、停车,然而当前振捣装置起步阶段存在振捣转速超调和调整时间过长的现象,不利于路面摊铺质量的进一步提升。
技术实现要素:
5.本技术的目的在于克服现有技术中的不足,提供一种摊铺机及其振捣转速控制方法,能够调控摊铺机振捣装置的振捣转速。
6.为达到上述目的,本发明是采用下述技术方案实现的:一方面,本发明提供一种摊铺机,包括振捣装置和振捣驱动,振捣装置用于对摊铺材料进行初步压实,振捣驱动用于给振捣装置提供驱动力并调节振捣转速,其特征在于:还包括振捣转速控制器、存储器、振捣转速传感器;所述振捣转速传感器用于测量振捣装置的振捣转速;所述振捣转速控制器分别与存储器、振捣转速传感器和振捣驱动电连接;所述振捣驱动驱动连接振捣装置以使使振捣装置遍历各振捣转速和/或使得振捣驱动遍历各振捣转速控制量,获取各振捣转速与振捣转速控制量的对应关系,并将获取的对应关系存储于存储器;振捣转速控制器至少基于存储器存储的振捣转速与振捣转速控制量的对应关系来调控发送至振捣驱动的振捣转速控制量以调控振捣装置的振捣转速。
7.进一步地,所述振捣驱动包括振捣泵和振捣马达;所述振捣转速控制器输出端连接振捣泵,振捣泵驱动连接振捣马达,振捣马达驱动连接振捣装置;所述振捣转速控制器通过控制振捣泵的振捣转速控制量来调控振捣装置的振捣转速。
8.进一步地,所述的摊铺机还包括计时器;所述振捣转速控制器与计时器电连接。
9.进一步地,所述振捣转速控制器、存储器以及计时器集成为一体。
10.另一方面,本发明提供一种摊铺机的振捣转速控制方法,包括以下步骤:利用所述振捣转速控制器控制振捣驱动以使得振捣装置遍历各振捣转速和/或使得振捣驱动遍历各振捣转速控制量,获取振捣转速与振捣转速控制量的对应关系,并将振捣转速与振捣转速控制量的对应关系存储于存储器;振捣转速控制器至少基于存储器存储的振捣转速与振捣转速控制量的对应关系来控制振捣驱动以调节振捣转速。
11.进一步地,所述振捣转速控制器至少基于存储器存储的振捣转速与振捣转速控制量的对应关系来控制振捣驱动以调节振捣转速包括:当启动振捣装置时,基于振捣转速与振捣转速控制量的对应关系,所述振捣转速控制器利用振捣转速目标值,确定初始振捣转速控制量;振捣转速控制器利用初始振捣转速控制量控制振捣驱动以调控振捣装置的振捣转速;经过设定时间后或者当实时振捣转速稳定后,比较实时振捣转速与振捣转速目标值之间的大小,并根据比较结果控制振捣驱动以调节振捣转速使实时振捣转速趋向于振捣转速目标值;其中,振捣转速目标值可以人工输入或者由程序自动生成。
12.进一步地,所述设定时间与振捣转速目标值相关。
13.进一步地,所述设定时间与振捣转速目标值成正比。
14.进一步地,所述比较实时振捣转速与振捣转速目标值之间的大小,并根据比较结果控制振捣驱动以调节振捣转速使实时振捣转速趋向于振捣转速目标值包括:当振捣转速传感器测量出的实时振捣转速高于振捣转速目标值时,振捣转速控制器减小传输至振捣驱动的振捣转速控制量,以减小振捣转速;当振捣转速传感器测量出的实时振捣转速低于振捣转速目标值时,振捣转速控制器增大传输至振捣驱动的振捣转速控制量,以增加振捣转速。
15.与现有技术相比,本发明所达到的有益效果:在摊铺机起步阶段可以精准控制振捣装置的振捣转速,避免超调并减少振捣转速调整时间,从而有利于提升路面摊铺质量;无需耗费人员精力,通过程序自动实现振捣转速与振捣转速控制量的对应关系的标定,且适用于不同机型、配置;在振捣转速控制器出现故障的意外情况下,通过振捣转速与振捣转速控制量的对应关系仍能实现较为准确地控制振捣转速。
附图说明
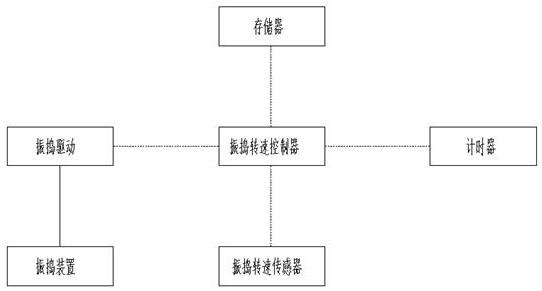
16.图1为摊铺机连接示意图。
具体实施方式
17.实施例1
本实施例提供一种摊铺机。
18.本实施例的摊铺机包括振捣装置和振捣驱动。其中,振捣装置用于对摊铺材料进行初步压实,振捣驱动用于给振捣装置提供驱动力并调节振捣转速。
19.参考图1,本实施例的摊铺机还包括振捣转速控制器、存储器、振捣转速传感器。其中,振捣转速传感器用于测量振捣装置的振捣转速;振捣转速控制器分别与存储器、振捣转速传感器和振捣驱动电连接;振捣驱动驱动连接振捣装置。
20.应用中,振捣装置遍历各振捣转速和/或振捣驱动遍历各振捣转速控制量,获取各振捣转速与振捣转速控制量的对应关系,并将获取的对应关系存储于存储器;振捣转速控制器至少基于存储器存储的振捣转速与振捣转速控制量的对应关系来调控发送至振捣驱动的振捣转速控制量以调控振捣装置的振捣转速。其中,振捣转速控制量是指用来控制振捣泵排量或者电磁流量阀流量的控制量,振捣转速控制量为电流、电压或者其它控制信号。实际应用时,振捣驱动包括振捣泵、振捣马达以及必要的管路。振捣转速控制器输出端连接振捣泵,振捣泵驱动连接振捣马达,振捣马达驱动连接振捣装置。优选地,振捣泵的排量可以电控调节,从而可以调节振捣转速。
21.本实施例实际应用时,振捣泵也可以是固定排量的,此时振捣驱动还包括电磁流量阀,通过电磁流量阀调节振捣装置的振捣转速。
22.参考图1,本实施例的摊铺机还包括计时器,振捣转速控制器与计时器电连接。振捣转速控制器、计时器、存储器可以是空间上分开分布的,然而优选地可以集成为一体。现代摊铺机的控制系统通常具有控制、计时和存储的功能,无需额外设置专用的振捣转速控制器、计时器、存储器,通过现有摊铺机的控制系统也可对振捣转速进行控制。
23.应用中,振捣转速传感器可以有机械式、电磁式、光感式等不同的类型,可以集成于振捣马达上,也可以是单独设置的。
24.实施例2在实施例1的基础上,本实施例提供一种摊铺机的振捣转速控制方法。
25.本实施例的摊铺机的振捣转速控制方法,包括以下步骤:s1利用振捣转速控制器控制振捣驱动以使得振捣装置遍历各振捣转速和/或使得振捣驱动遍历各振捣转速控制量,获取振捣转速与振捣转速控制量的对应关系,并将振捣转速与振捣转速控制量的对应关系存储于存储器;s2振捣转速控制器至少基于存储器存储的振捣转速与振捣转速控制量的对应关系来控制振捣驱动以调节振捣转速。
26.容易理解地,每次施工前振捣转速控制器控制振捣装置遍历各振捣转速和/或各振捣转速控制量对两者对应关系进行标定虽然是可行的,但大部分情况下是不必要的。通常,摊铺机出厂前由制造商输入控制指令对振捣转速和振捣转速控制量对两者对应关系进行初始自动标定,此后振捣转速控制器根据存储器储存的振捣转速和振捣转速控制量的对应关系对振捣转速进行控制即可。例外情况下,例如用户对摊铺机更改配置时,也可以由用户输入控制指令对振捣转速和振捣转速控制量的对应关系再次进行自动标定。
27.容易理解地,“遍历”并不是指经历每一振捣转速和/或振捣转速调节量值,经历足够有代表性的离散点即可。例如当振捣转速设计范围为500r/min到1800r/min时,从500r/min开始每隔50r/min或者100r/min记录一次直到1800r/min即可。
28.振捣转速与振捣转速控制量的对应关系可以以函数或者若干离散点映射关系的形式储存于存储器内。当以函数形式存储时,通过振捣转速目标值很容易就可以求出对应的振捣转速控制量即初始振捣转速控制量;当以若干离散点映射关系的形式存储时,可以通过插值的形式根据振捣转速目标值求出初始振捣转速控制量。施工过程中由于等待料车、更换料车等原因,摊铺机及其振捣装置往往要经历多次起步、停车。当摊铺机重新起步往前摊铺并启动振捣装置时,首先,基于振捣转速与振捣转速控制量的对应关系,所述振捣转速控制器利用振捣转速目标值,确定初始振捣转速控制量;接着,振捣转速控制器利用初始振捣转速控制量控制振捣驱动以调控振捣装置的振捣转速;然后,经过设定时间后或者当实时振捣转速稳定后,比较实时振捣转速与振捣转速目标值之间的大小,并根据比较结果控制振捣驱动以调节振捣转速,使实时振捣转速趋向于振捣转速目标值;其中,振捣转速目标值可以人工输入或者由程序自动生成。
29.实际应用中,经过设定时间后或者当实时振捣转速稳定后,此时采用行业常用的振捣转速闭环控制策略即可。可见本实施例是开环控制与闭环控制相结合。
30.相比于漫无目的地在振捣装置启动阶段就进行闭环控制,例如采用pid算法,通过初始振捣转速控制量先开环控制振捣驱动,经过设定时间后再转入闭环控制,就可以很好地避免超调或者长时间调整不到位,从而改进起步阶段压实度一致性。设定时间可以是固定值例如300ms或者600ms。然而更好的是,设定时间与振捣转速目标值相关联,振捣转速目标值越高,设定时间则越长。容易理解地,启动阶段振捣转速有一个加速过程,转速越高,需要的加速时间也越长。
31.设定时间可以与振捣转速目标值成正比,当然也可以视具体情况为其它正相关关系。
32.振捣转速目标值通常由人工输入,亦可由振捣转速控制器根据预先设定的程序及相关参数自动生产。
33.振捣装置启动时,振捣转速控制器可以直接将初始振捣转速控制量传递给振捣驱动,也可以以斜坡或者其它函数形式在设定时间内逐步将振捣转速控制量提升至振捣转速目标值对应的初始振捣转速控制量。
34.经过设定时间后或者当实时振捣转速稳定后,振捣转速控制器获取实时振捣转速,并比较实时振捣转速与振捣转速目标值之间的大小:当振捣转速传感器测量出的实时振捣转速高于振捣转速目标值时,振捣转速控制器减小传输至振捣驱动的振捣转速控制量,以减小振捣转速;当振捣转速传感器测量出的实时振捣转速低于振捣转速目标值时,振捣转速控制器增大传输至振捣驱动的振捣转速控制量,以增加振捣转速。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1