适用于电磁橇的轨面支撑装置及电磁橇的制作方法
本发明涉及电磁橇,尤其涉及一种适用于电磁橇的轨面支撑装置及电磁橇。
背景技术:
1、地面高速动态试验是在地面进行的模拟试验件动态工作环境从而对试验件使用性能进行综合判定的大型动态试验,能够模拟试验件真实使用过程中的过载、速度等动态工作环境,目前广泛以火箭为助推动力进行地面滑跑试验,用于航空、航天、兵器、工业高科技产品领域的考核鉴定,也可以承担弹射救生、航空生理、空气动力、导弹精确制导、宇航器、降落伞、高过载、碰撞等多种试验任务。
2、传统火箭橇可分为上部结构和下部结构两部分,上部结构由钢轨、扣件等组成,下部结构由基础、可调支座和承轨梁组成。钢轨通过扣件等固定在承轨梁顶部,滑跑橇车通过滑靴与钢轨的接触实现支撑、限位,滑靴与钢轨的横向间隙仅为1-2mm。钢轨及承轨梁受力均会产生变形,当滑跑橇车质量增加、速度增加时,变形增大,且钢轨与承轨梁变形叠加,当变形超过靴轨间隙时将会影响橇车通过性,带来试验风险。并且,传统火箭橇的支撑部分也无法满足高速重载电磁橇的支撑需求,存在滑轨变形控制难度大、精度难以保证等问题。
技术实现思路
1、本发明提供了一种适用于电磁橇的轨面支撑装置及电磁橇,能够解决现有技术中的技术问题。
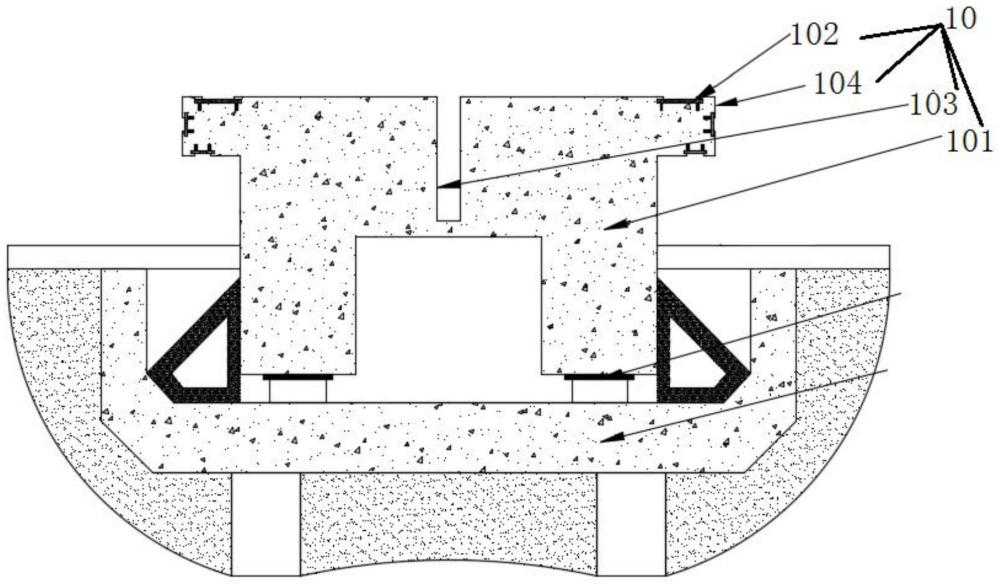
2、本发明提供了一种适用于电磁橇的轨面支撑装置,其中,该装置包括一体化承轨梁和橇车底部支撑单元,所述一体化承轨梁包括梁体和加固支撑部件,所述梁体顶部中间位置开设有用于设置电机设备的电机槽,所述梁体顶部两端具有延伸部,所述延伸部的上表面、下表面和延伸面上均预埋有所述加固支撑部件,所述橇车底部支撑单元设置在电磁橇的本体底部并与所述加固支撑部件接触,以对所述电磁橇进行垂向支撑、横向限位和垂向限位。
3、优选地,所述加固支撑部件为金属板。
4、优选地,所述金属板为高锰钢板。
5、优选地,所述梁体为混凝土梁体。
6、优选地,所述橇车底部支撑单元为滑块。
7、本发明还提供了一种电磁橇,其中,包括上述的轨面支撑装置。
8、通过上述技术方案,可以摒弃传统滑轨支撑方式,将梁体和加固支撑部件进行一体化设计,整体作为“钢轨”,对电磁橇底部结构进行匹配设计,与底部支撑单元整体作为“滑靴”。由此,可以在高速、重载的大载荷使用环境下,实现最大可至兆牛级的载荷支撑,解决了滑轨变形控制难度大、精度难以保证的问题;并且,橇车底部支撑与主体分开设计,匹配承轨梁设计,对不同试验样件兼容性强。
技术特征:
1.一种适用于电磁橇的轨面支撑装置,其特征在于,该装置包括一体化承轨梁和橇车底部支撑单元,所述一体化承轨梁包括梁体和加固支撑部件,所述梁体顶部中间位置开设有用于设置电机设备的电机槽,所述梁体顶部两端具有延伸部,所述延伸部的上表面、下表面和延伸面上均预埋有所述加固支撑部件,所述橇车底部支撑单元设置在电磁橇的本体底部并与所述加固支撑部件接触,以对所述电磁橇进行垂向支撑、横向限位和垂向限位。
2.根据权利要求1所述的装置,其特征在于,所述加固支撑部件为金属板。
3.根据权利要求2所述的装置,其特征在于,所述金属板为高锰钢板。
4.根据权利要求1所述的装置,其特征在于,所述梁体为混凝土梁体。
5.根据权利要求1-4中任一项所述的装置,其特征在于,所述橇车底部支撑单元为滑块。
6.一种电磁橇,其特征在于,包括上述权利要求1-5中任一项所述的轨面支撑装置。
技术总结
本发明涉及电磁橇技术领域,公开了一种适用于电磁橇的轨面支撑装置及电磁橇。其中,该装置包括一体化承轨梁和橇车底部支撑单元,所述一体化承轨梁包括梁体和加固支撑部件,所述梁体顶部中间位置开设有用于设置电机设备的电机槽,所述梁体顶部两端具有延伸部,所述延伸部的上表面、下表面和延伸面上均预埋有所述加固支撑部件,所述橇车底部支撑单元设置在电磁橇的本体底部并与所述加固支撑部件接触,以对所述电磁橇进行垂向支撑、横向限位和垂向限位。由此,本发明可以在高速、重载的大载荷使用环境下,实现最大可至兆牛级的载荷支撑,解决了滑轨变形控制难度大、精度难以保证的问题。
技术研发人员:翟茂春,周长斌,张艳清,韩树春,李少伟,邹玲,符晓亚,龚珺,潘念侨,董浩
受保护的技术使用者:中国航天科工飞航技术研究院(中国航天海鹰机电技术研究院)
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!