一种高墩变截面箱梁巡检机器人及其使用方法与流程
1.本技术涉及桥梁检测技术领域,更具体地说,涉及一种高墩变截面箱梁巡检机器人及其使用方法。
背景技术:
2.桥梁检查工作主要是对桥梁的状况进行调查,研究桥梁发生损坏、缺陷的位置,并且对其严重程度以及发展趋势进行分析,加强桥梁产生病害的主要原因,对桥梁产生病害的机理进行详细研究,为桥梁的加固做好基础。桥梁的检查是桥梁的养护、维修工作中比不可少的组成部分。
3.现有技术公开号为cn115162151a的文献提供一种高墩变截面箱梁巡检机器人,该装置通过在检测梁底时,在检测臂的两端安装摄像朝向梁底,并且利用驱动机构纵向轨道上纵向移动,就可以对梁底进行检查。当检测臂移动至桥墩时,利用扭转机构可以将检测臂竖向方向转动,以使检测臂可以穿过桥墩;当穿过桥墩后再利用扭转机构可将检测臂调整为横向水平状态,继续进行下一桥洞的检测,可以提高检测效率,方便对梁底的检测。
4.上述中的现有技术方案虽然通过现有技术的结构可以实现有关的有益效果,但是仍存在以下缺陷;该装置在进行巡检时,由于该装置的结构简单,不便于对墩变截面箱梁底部的污物或者灰尘的附着进行清理,导致污物会覆盖在裂缝处或者损坏处,从而会影响摄像的准确性,
5.鉴于此,我们提出一种高墩变截面箱梁巡检机器人。
技术实现要素:
6.1.要解决的技术问题
7.本技术的目的在于提供一种高墩变截面箱梁巡检机器人,解决了上述背景技术中提出的技术问题,实现了对高墩变截面箱梁上的污物进行清理的技术效果。
8.2.技术方案
9.本技术实施例提供了一种高墩变截面箱梁巡检机器人,包括:移动座、液压杆、固定板、电推杆、传动机构、摄像头、打磨清理机构及调节机构,所述移动座可以滑动配合设置在高墩变截面箱梁的轨道上;所述移动座上连接固定设置有液压杆,所述液压杆的活动杆一端连接固定设置有固定板;所述固定板两端均贯穿连接固定设置有电推杆;
10.电推杆的活动杆上端均固定设置有推板;
11.推板的上方均固定设置有传动机构和摄像头;
12.传动机构上均连接固定设置打磨清理机构,所述打磨清理机构可以实现对箱梁积灰处进行打磨清理的作用;
13.打磨清理机构上均设置有调节机构。
14.作为本技术文件技术方案的一种可选方案,所述移动座内壁贯穿转动连接设置有有双向丝杆,所述双向丝杆上外壁均对称的螺纹连接设置有两个固定座,所述固定座上连
接均固定设置有两个行进驱动电机,所述行进驱动电机输出端连接固定设置有摩擦轮。
15.通过采用上述技术方案,启动行进驱动电机,从而带动摩擦轮转动,从而可以带动装置进行移动。
16.作为本技术文件技术方案的一种可选方案,所述打磨清理机构包括钻杆和打磨杆,所述钻杆上滑动配合设置有打磨杆,所述打磨杆一侧外壁连接固定设置有钢丝刷。
17.通过采用上述技术方案,利用钻杆转动带动钻杆上的打磨杆进行转动,对高墩变截面箱梁上的污物进行清理。
18.作为本技术文件技术方案的一种可选方案,所述调节机构包括调节驱动电机、螺纹杆、移动块和连杆,所述调节驱动电机输出端连接固定设置有螺纹杆,螺纹杆可转动的设置在打磨杆内;所述螺纹杆外壁螺纹连接设置有移动块;移动块可滑动的设置在打磨杆内。
19.作为本技术文件技术方案的一种可选方案,所述移动块上铰接设置有连杆,所述连杆另一端与打磨杆的一端铰接设置。
20.通过采用上述技术方案,利用调节驱动电机带动连接的螺纹杆转动,使得螺纹杆可以带动螺纹连接的移动块进行移动,从而可以带动连杆,使得连杆可以带动打磨杆收回到钻杆内。
21.作为本技术文件技术方案的一种可选方案,所述传动机构包括传动驱动电机和蜗杆,所述传动驱动电机固定设置在推板的下方,传动驱动电机输出端连接固定设置有蜗杆,所述蜗杆另一端与钻杆连接固定设置。
22.作为本技术文件技术方案的一种可选方案,所述传动机构还包括蜗轮,所述蜗轮的一端通过销轴与推板转动连接设置,所述蜗轮与蜗杆啮合传动设置。
23.作为本技术文件技术方案的一种可选方案,所述蜗轮一侧呈偏心结构连接固定设置有固定头,所述固定头另一端转动连接设置有拉杆。
24.作为本技术文件技术方案的一种可选方案,所述摄像头镜头处连接固定设置有透明防护罩,所述透明防护罩一侧外壁转动连接设置有清洁杆。
25.作为本技术文件技术方案的一种可选方案,所述透明防护罩一侧滑动配合设置有齿条,所述清洁杆靠近齿条的一端连接固定设置有齿轮,所述齿轮与齿条啮合传动设置;所述齿条其中一端通过销轴与拉杆的一端转动铰接设置。
26.通过采用上述技术方案,蜗杆可以带动蜗轮连接的固定头进行转动,使得固定头可以带动拉杆,使得拉杆可以带动齿条进行往复移动,从而可以带动齿轮连接的清洁杆进行往复摆动,从而可以保持摄像头镜头处进行清理,从而可以利用摄像头进行巡检。
27.本发明提供一种高墩变截面箱梁巡检机器人的使用方法,包括以下步骤:
28.s1、将装置放置到高墩变截面箱梁的轨道上,通过转动双向丝杆,使得双向丝杆可以带动两个固定座同步反向移动,从而可以使得摩擦轮可以与轨道接触,卡紧在轨道上;
29.s2、启动行进驱动电机,从而带动摩擦轮转动,从而可以带动装置进行移动;
30.s3、利用液压杆及电推杆带动摄像头及打磨清理机构调节位置,从而可以进行巡检;
31.s4、当需要对高墩变截面箱梁上的污物进行清理时,可以利用传动驱动电机带动钻杆转动,然后带动钻杆上的打磨杆进行转动,对高墩变截面箱梁上的污物进行清理,从而可以使得污物不会遮挡;
32.s5、在钻杆转动时可以带动蜗杆转动,使得蜗杆可以带动蜗轮连接的固定头进行转动,使得固定头可以带动拉杆,使得拉杆可以带动齿条进行往复移动,从而可以带动齿轮连接的清洁杆进行往复摆动,从而可以保持摄像头镜头处进行清理,从而可以利用摄像头进行巡检;
33.s6、当需要对高墩变截面箱梁上的排水孔进行通孔时,可以利用调节驱动电机带动连接的螺纹杆转动,使得螺纹杆可以带动螺纹连接的移动块进行移动,从而可以带动连杆向下移动,使得连杆可以带动打磨杆收回到钻杆内,然后使得钻杆可以插入到高墩变截面箱梁上的排水孔内进行通孔。
34.3.有益效果
35.本技术实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
36.1.本技术由于采用了打磨清理机构技术手段,所以有效解决了现有技术中的技术问题,进而实现了在对高墩变截面箱梁进行巡检时,可以将高墩变截面箱梁上的污物打磨清理掉,从而使得破损处及裂缝处暴露出来,从而可以提高巡检效果。
37.2.本技术通过在钻杆内设置调节机构,可以实现对打磨杆的收纳,从而使得钻杆可以对高墩变截面箱梁上的排水孔内的堵塞进行清理,从而可以从而使得装置的功能多样化,进一步提高装置的实用性。
38.3.本技术通过在摄像头上设置清洁杆,可以在电机带动打磨清理机构的同时可以带动清洁杆进行往复摆动,对落到摄像头上的污物进行清理,保持摄像头的巡检效果。
附图说明
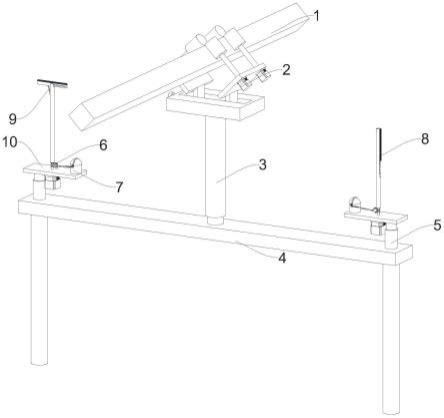
39.图1为本技术一较佳实施例公开的高墩变截面箱梁巡检机器人的整体结构示意图;
40.图2为本技术一较佳实施例公开的高墩变截面箱梁巡检机器人的移动座结构局部剖视示意图;
41.图3为本技术一较佳实施例公开的高墩变截面箱梁巡检机器人的部分结构示意图;
42.图4为本技术一较佳实施例公开的高墩变截面箱梁巡检机器人的传动机构结构示意图;
43.图5为本技术一较佳实施例公开的高墩变截面箱梁巡检机器人的摄像头上的结构示意图;
44.图6为本技术一较佳实施例公开的高墩变截面箱梁巡检机器人的打磨清理机构结构局部剖视示意图;
45.图中标号说明:1、轨道;2、移动座;3、液压杆;4、固定板;5、电推杆;6、传动机构;7、摄像头;8、打磨清理机构;9、调节机构;10、推板;201、双向丝杆;202、固定座;203、摩擦轮;204、行进驱动电机;801、钻杆;802、打磨杆;901、螺纹杆;902、移动块;903、连杆;904、调节驱动电机;601、蜗杆;602、蜗轮;603、固定头;604、拉杆;605、传动驱动电机;701、透明防护罩;702、清洁杆;703、齿条;704、齿轮。
具体实施方式
46.以下结合说明书附图对本技术作进一步详细说明。
47.参照图1,一种高墩变截面箱梁巡检机器人,包含:移动座2、液压杆3、固定板4、电推杆5、传动机构6、摄像头7、打磨清理机构8及调节机构9;
48.移动座2可以滑动配合设置在高墩变截面箱梁的轨道1上(轨道1是高墩变截面箱梁的一部分);移动座2上连接固定设置有液压杆3,液压杆3的活动杆一端连接固定设置有固定板4;
49.固定板4两端均贯穿连接固定设置有电推杆5;
50.电推杆5的活动杆上端均固定设置有推板10;
51.推板10的上方均固定设置有传动机构6和摄像头7;
52.传动机构6上均连接固定设置打磨清理机构8,打磨清理机构8可以实现对箱梁积灰处进行打磨清理的作用。
53.打磨清理机构8上均设置有调节机构9。
54.参照图2,移动座2内壁贯穿转动连接设置有有双向丝杆201,双向丝杆201外壁对称的螺纹连接设置有两个固定座202,固定座202上均连接固定设置有两个行进驱动电机204,行进驱动电机204输出端均连接固定设置有摩擦轮203。双向丝杆201可以带动两个固定座202同步反向移动,调节摩擦轮203的间距,便于装置从轨道1上安装取下,同时使得装置适用于不同尺寸的轨道1上。
55.参照图6,打磨清理机构8包括钻杆801和打磨杆802;
56.钻杆801上滑动配合设置有打磨杆802,打磨杆802一侧外壁连接固定设置有钢丝刷。钢丝刷可以提高清理效果。
57.调节机构9包括调节驱动电机904、螺纹杆901、移动块902和连杆903;
58.调节驱动电机904固定设置在打磨杆802内;
59.调节驱动电机904输出端连接固定设置有螺纹杆901,螺纹杆901可转动的设置在打磨杆802内;螺纹杆901外壁螺纹连接设置有移动块902;移动块902可滑动的设置在打磨杆802内。
60.移动块902上铰接设置有连杆903,连杆903另一端与打磨杆802的一端铰接设置。调节机构9可以实现对打磨杆802的支撑收纳作用。
61.参照图3和图4,传动机构6包括传动驱动电机605和蜗杆601;
62.传动驱动电机605连接固定设置在推板10的下方,传动驱动电机605输出端连接固定设置有蜗杆601,蜗杆601另一端与钻杆801连接固定设置。
63.传动机构6还包括蜗轮602,蜗轮602的一端通过销轴与推板10转动连接设置,蜗轮602与蜗杆601啮合传动设置。
64.蜗轮602一侧呈偏心结构连接固定设置有固定头603,固定头603另一端转动连接设置有拉杆604。
65.参照图4和图5,摄像头7镜头处连接固定设置有透明防护罩701,透明防护罩701一侧外壁转动连接设置有清洁杆702。
66.透明防护罩701一侧滑动配合设置有齿条703,清洁杆702靠近齿条703的一端连接固定设置有齿轮704,齿轮704与齿条703啮合传动设置;齿条703其中一端通过销轴与拉杆
604的一端转动铰接设置。
67.本发明一种高墩变截面箱梁巡检机器人的实施原理为:当需要对高墩变截面箱梁进行巡检时,可以将装置放置到高墩变截面箱梁的轨道1上,通过转动双向丝杆201,使得双向丝杆201可以带动两个固定座202同步反向移动,从而可以使得摩擦轮203可以与轨道1接触,卡紧在轨道1上,然后可以启动行进驱动电机204,从而带动摩擦轮203转动,从而可以带动装置进行移动;
68.然后可以利用液压杆3及电推杆5带动摄像头7及打磨清理机构8调节位置,从而可以进行巡检,当需要对高墩变截面箱梁上的污物进行清理时,可以利用传动驱动电机605带动钻杆801转动,然后带动钻杆801上的打磨杆802进行转动,对高墩变截面箱梁上的污物进行清理,从而可以使得污物不会遮挡;
69.同时在钻杆801转动时可以带动蜗杆601转动,使得蜗杆601可以带动蜗轮602连接的固定头603进行转动,使得固定头603可以带动拉杆604,使得拉杆604可以带动齿条703进行往复移动,从而可以带动齿轮704连接的清洁杆702进行往复摆动,从而可以保持摄像头7镜头处进行清理,从而可以利用摄像头7进行巡检;
70.当需要对高墩变截面箱梁上的排水孔进行通孔时,可以利用调节驱动电机904带动连接的螺纹杆901转动,使得螺纹杆901可以带动螺纹连接的移动块902进行移动,从而可以带动连杆903向下移动,使得连杆903可以带动打磨杆802收回到钻杆801内,然后使得钻杆801可以插入到高墩变截面箱梁上的排水孔内进行通孔。
71.本发明提供一种高墩变截面箱梁巡检机器人的使用方法,包括以下步骤:
72.s1、将装置放置到高墩变截面箱梁的轨道1上,通过转动双向丝杆201,使得双向丝杆201可以带动两个固定座202同步反向移动,从而可以使得摩擦轮203可以与轨道1接触,卡紧在轨道1上;
73.s2、启动行进驱动电机204,从而带动摩擦轮203转动,从而可以带动装置进行移动;
74.s3、可以利用液压杆3及电推杆5带动摄像头7及打磨清理机构8调节位置,从而可以进行巡检;
75.s4、当需要对高墩变截面箱梁上的污物进行清理时,可以利用传动驱动电机605带动钻杆801转动,然后带动钻杆801上的打磨杆802进行转动,对高墩变截面箱梁上的污物进行清理,从而可以使得污物不会遮挡;
76.s5、在钻杆801转动时可以带动蜗杆601转动,使得蜗杆601可以带动蜗轮602连接的固定头603进行转动,使得固定头603可以带动拉杆604,使得拉杆604可以带动齿条703进行往复移动,从而可以带动齿轮704连接的清洁杆702进行往复摆动,从而可以保持摄像头7镜头处进行清理,从而可以利用摄像头7进行巡检;
77.s6、当需要对高墩变截面箱梁上的排水孔进行通孔时,可以利用调节驱动电机904带动连接的螺纹杆901转动,使得螺纹杆901可以带动螺纹连接的移动块902进行移动,从而可以带动连杆903向下移动,使得连杆903可以带动打磨杆802收回到钻杆801内,然后使得钻杆801可以插入到高墩变截面箱梁上的排水孔内进行通孔。
78.本申发明采用打磨清理机构实现了在对高墩变截面箱梁进行巡检时,可以将高墩变截面箱梁上的污物打磨清理掉,从而使得破损处及裂缝处暴露出来,从而可以提高巡检
效果。通过在钻杆内设置调节机构,可以实现对打磨杆的收纳,从而使得钻杆可以对高墩变截面箱梁上的排水孔内的堵塞进行清理,从而可以从而使得装置的功能多样化,进一步提高装置的实用性。通过在摄像头上设置清洁杆,可以在电机带动打磨清理机构的同时可以带动清洁杆进行往复摆动,对落到摄像头上的污物进行清理,保持摄像头的巡检效果。
79.以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的仅为本发明的优选例,并不用来限制本发明,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1