一种小型铁路清砟装置
1.本发明属于铁路机械领域,具体涉及一种小型铁路清砟装置。
背景技术:
2.铺设于铁路道床上的砟石在经年使用后会出现板结现象,导致其减震、吸热、降噪等效果变差,甚至影响行车安全。因此就需要定期对板结处的砟石进行松动、回收和更换,即轨道清砟。铁路道床的清砟程序包括砟石破碎、回收、分筛和回填。目前,对于铁路道砟石的清理回收主要使用大中型铁道清筛机。而多数铁道清筛机对道床的清筛作用并不彻底,尤其是对于铁道分叉处道岔内砟石的清理回收还是要依靠人工,使得施工效率受限。
技术实现要素:
3.针对上述技术问题,本发明提供了一种小型铁路清砟装置。
4.一种小型铁路清砟装置,包括车架7和轨道轮8,其特征在于:还包括集砟桶1、抽风管2、扶手3、排风管4、电机5、风机6、吸石软管26和吸石钢管19;集砟桶1和风机6由抽风管2连接在一起;吸石软管26经管道固定接头连接入集砟桶1的风道;吸石软管26与吸石钢管19之间利用管接头连接。
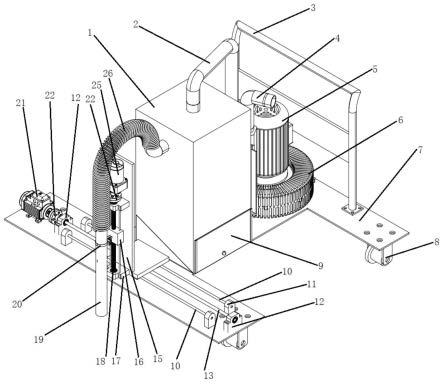
5.一种小型铁路清砟装置,包括车架7、轨道轮8和扶手3,其特征在于:除吸砟系统外,还包括纵向运动系统和横向运动系统;所述吸砟系统包括集砟桶1、电机5、风机6、吸石软管26和吸石钢管19,集砟桶1和风机6由抽风管2连接在一起,风机6上还设置有排风管4;吸石软管26经管道固定接头连接入集砟桶1的风道;吸石软管26与吸石钢管19之间利用管接头连接;所述纵向运动系统包括竖直托板15、纵向移动连接块16、纵向滚珠丝杠18、纵向进给电机25、纵向直线导轨28、纵向导轨滑块36、纵向滚珠丝杠支撑座37和纵向直线导轨支撑座38;纵向滚珠丝杠18和纵向直线导轨28分别通过纵向滚珠丝杠支撑座37和纵向直线导轨支撑座38固定在竖直托板15上;纵向导轨滑块36沿纵向直线导轨28移动;纵向移动连接块16作为一个安装台,将卡箍20、纵向导轨滑块36,以及与纵向滚珠丝杠18配合工作的丝杠螺母连接在一起,实现这些部件的同步运动;横向运动系统包括横向直线导轨10、横向直线导轨支撑座11、横向滚珠丝杠支撑座12、横向滚珠丝杠13、横向移动托板14、横向进给电机21、横向导轨滑块29和横向滚珠丝杠螺母30;横向直线导轨10和横向滚珠丝杠13分别通过横向直线导轨支撑座11和横向滚珠丝杠支撑座12固定在车架7上;横向导轨滑块29和横向滚珠丝杠螺母30均固定于横向移动托板14底部;横向导轨滑块29和横向滚珠丝杠螺母30分别沿直线导轨10和横向滚珠丝杠13移动;横向移动托板14与竖直托板15连接固定在一起;吸石钢管19通过卡箍20与纵向移动连接块16连接在一起。
6.进一步的,所述小型铁路清砟装置还包括视觉识别与智能化控制系统;所述视觉识别与智能化控制系统包括设置于车体7前端和/或底部的图像采集摄像头、设置于集砟桶1顶部或扶手3附近的触摸屏、自动控制柜31及其内部的plc控制系统、动力源34和驱动电机35。驱动电机35安装在车体7的底部,可采用链轮或同步带传动等传动方式。横向进给电机
21、纵向进给电机25和驱动电机35均由plc控制系统控制,并由动力源34提供动力。动力源34可以为锂电池或柴油发动机等。
7.进一步的,所述集砟桶1的倾斜底部24是与水平面具有一定角度的倾斜平面,在平面倾斜方向的集砟桶1壁上设有出砟口23,出砟口23上覆盖有可开合的挡板9。
8.进一步的,纵向直线导轨28有两根,并且分置于纵向滚珠丝杠18的两侧;横向直线导轨支撑座11和其上的横向直线导轨10可以有两组,分别平行设置于横向滚珠丝杠13的两侧。
9.进一步的,纵向移动连接块16可以为一个整体部件,兼具滚珠丝杆螺母和纵向导轨滑块36的功能,能够同时沿纵向滚珠丝杠18和纵向直线导轨28上下移动。支撑座17也可以为一个整体部件,兼具纵向滚珠丝杠支撑座37和纵向直线导轨支撑座38的功能,能够同时支撑固定纵向滚珠丝杠18和纵向直线导轨28。
10.进一步的,每根横向直线导轨10上的横向导轨滑块29可为1-3块;每根纵向直线导轨28上的纵向导轨滑块36可为1-3块。
11.进一步的,在横向移动托板14上和竖直托板15的背面安装有楔形块32。横向丝杠螺母30可以固连于楔形块32的一侧或在楔形块32的两侧各固定一个。
12.进一步的,横向进给电机21和纵向进给电机25分别通过联轴器22与横向滚珠丝杠13和纵向滚珠丝杠18连接。
13.进一步的,横向移动托板14和竖直托板15可以合为一个侧剖面为l形的整体部件。
14.进一步的,吸石软管26与吸石钢管19之间的管接头可以是扩口式管接头,吸石钢管19与扩口式管接头之间采用o型橡胶密封圈密封。
15.进一步的,卡箍20上还安装有蝶形螺母27,可用于调节卡箍20绑定吸石钢管19的松紧程度。
16.进一步的,风机6为无碳刷高压风机。
17.本发明利用了负压原理,发动机驱动风机工作时,风机内叶轮高速旋转,叶轮中各部分空气也被带动一起旋转,在叶轮中心处的空气因受到离心力的作用,被抛向叶轮的边缘,在叶轮中心处形成负压,于是外部空气在压差的作用下不断地流入并补充到叶轮中心处,这就使风机具备了吸入空气的能力。风机将桶内的空气抽出,形成瞬时真空,同时负压快速升高,高负压使空气迅速流入桶身内部,通过吸石软管,流动的空气携带着砟石进入集砟桶内。
18.本发明所述装置小巧,可便捷地运输到施工地点,并迅速将破碎的砟石吸入装置内,为后续砟石回填施工提供便利。其施工方式灵活、适用于长短途作业,尤其适用于局部高质量清砟要求的作业。在本技术提供的实施例1中,所述装置可由2人配合工手动作业。一人推动装置,一人控制吸砟钢管。在本技术提供的实施例2中,所述装置的纵向运动系统和横向运动系统能够根据随时变化的砟石位置和数量全方位灵活移动吸尘管口,大大减轻了吸砟人员的工作量。在本技术提供的实施例3中,所述装置结合视觉识别与智能化控制系统后,仅有一名施工人员操控即可轻松、高效地完成清砟工作。
附图说明
19.图1为本发明实施例2所述装置结构示意图;
20.图2为本发明实施例2所述装置侧视图;
21.图3为本发明实施例2所述装置前视图;
22.图4为本发明实施例2所述装置俯视图;
23.图5为本发明实施例2纵向移动机构的机构示意图;
24.图6为本发明实施例2纵向移动机构的侧视图;
25.图7为本发明实施例2纵向移动机构的仰视;
26.图8为本发明所述装置集砟桶1的结构示意图;
27.图9为本发明实施例1所述装置结构示意图;
28.图10为本发明实施例3所述装置结构示意图;
29.图11为本发明实施例3所述装置俯视图;
30.图12为本发明实施例3所述装置前视图;
31.图13为本发明实施例3所述装置右视图;
32.图14为本发明实施例3横纵向移动机构的局部示意图;
33.图15为本发明实施例3横纵向移动机构的侧视图。
具体实施方式
34.下面结合附图对本发明进行进一步的描述:
35.本技术附图中:集砟桶1,抽风管2,扶手3,排风管4,电机5,风机6,车架7,轨道轮8,挡板9,横向直线导轨10,横向直线导轨支撑座11,横向滚珠丝杠支撑座12,横向滚珠丝杠13,横向移动托板14,竖直托板15,纵向移动连接块16,支撑座17,纵向滚珠丝杠18,吸石钢管19,卡箍20,横向进给电机21,联轴器22,出砟口23,倾斜底部24,纵向进给电机25,吸石软管26,蝶形螺母27,纵向直线导轨28,横向导轨滑块29,横向滚珠丝杠螺母30,自动控制柜31,楔形块32,铁轨33,动力源34,驱动电机35,纵向导轨滑块36,纵向滚珠丝杠支撑座37,纵向直线导轨支撑座38。
36.实施例1
37.如图8和9所示,本发明所述装置包括车架7和其上所设置的集砟桶1、抽风管2、扶手3、排风管4、电机5和风机6。集砟桶1上装有吸石软管26,经管道固定接头连接入集砟桶1的风道。吸石软管26与吸石钢管19之间利用扩口式管接头连接。集砟桶1侧壁上设有出砟口23,出砟口23上覆盖有挡板9。施工时可根据集砟量来确定开启或关闭挡板9。抽风管2一端与集砟桶1相连接,另一端与风机6连接。车架7下方还设有四个轨道轮8,以便所述装置在铁轨33上行进。
38.施工时,电机5驱动风机6旋转,将集砟桶1内部空气经由抽风管2和排风管4抽出,形成瞬时真空。负压快速升高,使空气迅速流入集砟桶1的内部,吸石钢管19端口处的砟石由流动的空气携带通过吸石软管26进入集砟桶1。通过人力推动扶手3或者其他驱动方式,可使整个装置沿铁轨33行进,逐步完成清砟工作。
39.风机6可以为无碳刷高压风机。
40.实施例2
41.如图1-7所示,所述装置的车架7上依次设有扶手3、风机6、集砟桶1、横向直线导轨支撑座11、横向滚珠丝杠支撑座12和横向进给电机21。车架7下方还设有四个轨道轮8,以便
所述装置在铁轨33上行进。
42.抽风管2一端与集砟桶1相连接,另一端与风机6连接。风机6上还设有排风管4和电机5。集砟桶1上装有吸石软管26,经管道固定接头连接入集砟桶1的风道。吸石软管26与吸石钢管19之间利用管接头连接,如扩口式管接头。吸石钢管19通过卡箍20连接于纵向移动连接块16上。卡箍20上还安装有蝶形螺母27,可用于调节卡箍20绑定吸石钢管19的松紧程度。
43.竖直托板15垂直于车架7所在平面,其上安装固定有纵向进给电机25和一对支撑座17。纵向滚珠丝杠18安装于支撑座17之间,并由纵向进给电机25驱动。两根纵向直线导轨28平行分置于纵向滚珠丝杠18两侧,且两端固定于支撑座17上。纵向移动连接块16作为一个整体部件,兼具滚珠丝杆螺母和导轨滑块功能,能够同时沿纵向滚珠丝杠18和纵向直线导轨28上下移动。纵向进给电机25上还连接有联轴器22。
44.车架7的前端安装固定有横向进给电机21、一对横向滚珠丝杠支撑座12和两对横向直线导轨支撑座11。每对横向直线导轨支撑座11之间安装有一根横向直线导轨10,每根横向直线导轨10上装有两个可沿其上移动的横向导轨滑块29。横向滚珠丝杠13设置于横向滚珠丝杠支撑座12之间,并由横向进给电机21驱动。横向丝杠螺母30沿横向滚珠丝杠13移动。横向进给电机21上还连接有联轴器22。两组横向直线导轨支撑座11和横向直线导轨10分别平行设置于横向滚珠丝杠支撑座12和横向滚珠丝杠13的上下两侧。
45.横向移动托板14垂直于竖直托板15所在平面,两者固连在一起。横向移动托板14底部的中间部位与横向丝杠螺母30连接固定,四角位置分别与一个横向导轨滑块29连接固定。
46.横向移动托板14和竖直托板15还可以合为一个整体部件,此部件侧剖面为l形。
47.工作状态下,电机5驱动风机6旋转,将集砟桶1内部空气经由抽风管2和排风管4抽出,形成瞬时真空。负压快速升高,使空气迅速流入集砟桶1的内部,吸石钢管19端口处的砟石由流动的空气携带通过吸石软管26进入集砟桶1。通过人力推动扶手3或者其他驱动方式,可使整个装置沿铁轨33行进,逐步完成清砟工作。沿纵向滚珠丝杠18和纵向直线导轨28移动的纵向移动连接块16带动吸石钢管19完成纵向移动;沿横向滚珠丝杠13和横向直线导轨10移动的横向移动托板14带动竖直托板15及其上的吸石钢管19完成横向移动。
48.风机6可以为无碳刷高压风机。
49.集砟桶1的倾斜底部24是与水平面具有一定角度的倾斜平面,在平面倾斜方向的集砟桶1侧壁上设有出砟口23,出砟口23上覆盖有挡板9。施工时可根据集砟量来确定开启或关闭挡板9。当打开挡板9时,砟石从集砟桶1中泄出;当关闭挡板9时,砟石被封闭在集砟桶1内。
50.实施例3
51.如图10-14所示,所述装置的车架7上除了设有与实施例2相同的吸砟系统、纵向运动系统、横向运动系统外,还安装有视觉识别与智能化控制系统。
52.所述吸砟系统包括集砟桶1、电机5、风机6、吸石软管26和吸石钢管19;所述纵向运动系统包括竖直托板15、纵向移动连接块16、纵向滚珠丝杠18、纵向进给电机25、纵向直线导轨28、纵向导轨滑块36、纵向滚珠丝杠支撑座37和纵向直线导轨支撑座38;所述横向运动系统包括横向直线导轨10,横向直线导轨支撑座11,横向滚珠丝杠支撑座12,横向滚珠丝杠
13,横向移动托板14,横向进给电机21,横向导轨滑块29和横向滚珠丝杠螺母30。
53.如图8所示,所述吸砟系统中,集砟桶1的倾斜底部24是与水平面具有一定角度的倾斜平面,在平面倾斜方向的集砟桶1侧壁上设有出砟口23,出砟口23上覆盖有挡板9。抽风管2一端与集砟桶1相连接,另一端与风机6连接。风机6上还安装有排风管4和电机5。集砟桶1上装有吸石软管26,经管道固定接头连接入集砟桶1的风道。吸石软管26与吸石钢管19之间利用扩口式管接头连接。吸石钢管19通过卡箍20连接于纵向移动连接块16上。
54.所述纵向移动系统中,竖直托板15垂直于车架7所在平面设置,其上安装固定有纵向进给电机25、纵向滚珠丝杠基座37和纵向直线导轨支撑座38。纵向滚珠丝杠18设置于纵向滚珠丝杠基座37之间,由纵向进给电机25驱动。两根纵向直线导轨28通过纵向直线导轨支撑座38平行分置于纵向滚珠丝杠18两侧。纵向移动连接块16的中心中空,其中固连有能够与纵向滚珠丝杠18配合工作的滚珠丝杠螺母;纵向移动连接块16的一侧设置有卡箍20,另一侧固连有纵向直线导轨滑块36。纵向直线导轨滑块36的数目可以是每根纵向直线导轨28上1-2块。纵向进给电机25上还连接有联轴器22。
55.如同实施例2和图5中所示,纵向滚珠丝杠基座37和纵向直线导轨支撑座38可合为一个整体部件,即支撑座17。
56.所述横向移动系统是在车架7的前端安装固定有横向进给电机21、一对横向滚珠丝杠支撑座12和两对横向直线导轨支撑座11。每对横向直线导轨支撑座11之间安装有一根横向直线导轨10,每根横向直线导轨10上装有两个可沿其上移动的横向导轨滑块29。横向滚珠丝杠13设置于横向滚珠丝杠支撑座12之间,并由横向进给电机21驱动。横向滚珠丝杠13安装有可沿其上移动的横向丝杠螺母30。横向进给电机21上还连接有联轴器22。两组横向直线导轨支撑座11和横向直线导轨10分别平行设置于横向滚珠丝杠支撑座12和横向滚珠丝杠13的上下两侧。
57.在本实施例中横向移动托板14与竖直托板15合为一个整体部件,此部件侧剖面为l形。此l形部件上方安装有楔形块32。横向丝杠螺母30可以固连于楔形块32的一侧或在楔形块32的两侧各安装一个。横向移动托板14底部四角位置分别设置一个横向导轨滑块29,其分布位置如图7所示。
58.每根横向直线导轨10上的横向导轨滑块29也可为一块。
59.所述视觉识别与智能化控制系统包括设置于车体7前端和/或底部的图像采集摄像头、设置于集砟桶1顶部或扶手3附近的触摸屏、自动控制柜31及其内部的plc控制系统、动力源34和安装在车体7底部的驱动电机35。动力源34为本发明所述装置提供动力,例如可采用锂电池或柴油发动机。驱动电机35的作用是驱动整个装置行进,可采用链轮或同步带传动等传动方式。横向进给电机21、纵向进给电机25、装置驱动电机35均由plc控制,由动力源34提供动力。
60.工作状态下,通过人力推动扶手3或者机车驱动等方式,将本技术所述装置置于铁轨33上,启动自动控制柜31上的运行按钮后,图像采集摄像头对道岔区域进行图像采集,图像数据经过处理后定位出的道岔工作区域,传输到plc控制系统并反馈到触摸屏。施工人员能够根据显示的实时道床砟石情况,通过控制触摸屏来操控本发明所述装置完成吸砟工作,也可以根据需要启动集砟桶1侧壁上的挡板9来完成泄砟的工作。
61.以上内容为本发明的具体实例,较为详尽的说明发明的思想,所属本技术领域的
技术人员对描述的具体实例对各种修改、补充或用类似方法代替,只要不偏离本发明或者超越权利要求定义范围,均属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1