一种带有防撞结构的机场道面安全检测机器人的制作方法
1.本实用新型涉及安全检测机器人技术领域,具体是一种带有防撞结构的机场道面安全检测机器人。
背景技术:
2.随着无损检测传感器、5g、大数据、物联网、云存储与处理、人工智能、机器人等技术的快速发展,机场道面管养呈现从人工半自动抽样检测到智能化全面精准检测、从低频静态评估到高频动态评估与预警、从单一信息分析到多元异构数据融合评价、从基于经验事后被动粗放式养护到基于数据预防性的精准养护、从阶段性离散管养到全寿命周期管养的发展趋势。采用机器人技术对全场道面表观与内部结构状况进行周期性采集,机器人在自动按设定路线行驶时,能对道面情况进行采集并上传分析,利于后续基于周期性的道面表观与内部结构状况等数据开展预防性养护和精准养护,实现对道面安全和健康的全寿命周期管理。
3.现有专利公告号为cn110409266b公开的一种机场跑道道面安全检测机器人中,车板底部的一侧固定安装有第一摄像头;能够对路面的情况进行管观察,通过行进机构带动清理机构、收集机构和观测机构在道面上行进,依靠观测机构对道路路面情况进行观察,通过清理机构可以对难以清理的异物进行清理。
4.上述安全检测机器人能对机场道面进行检测,并对道面进行清理,但第一摄像头设置在车板底部,易受撞击,且清理机构和收集机构高度固定,在其他路面行驶或遇较大障碍时,车板底部清理机构和收集机构会影响机器人的行驶。针对以上问题,提出一种带有防撞结构的机场道面安全检测机器人。
技术实现要素:
5.本实用新型的目的在于提供一种带有防撞结构的机场道面安全检测机器人,以解决上述背景技术中提出的问题。
6.为实现上述目的,本实用新型提供如下技术方案:
7.一种带有防撞结构的机场道面安全检测机器人,包括机器人主体和连接在机器人主体底部的移动轮,所述机器人主体一侧连接图像采集设备;
8.所述机器人主体靠近图像采集设备一端的顶部通过支架连接探照灯,所述机器人主体两侧均设有防撞条,所述机器人主体上设有用于安装防撞条的缓冲件;
9.所述机器人主体远离图像采集设备一侧连接安装座,所述安装座铰接安装架,所述安装架底部连接吸尘罩,所述吸尘罩底部安装清理刷,所述机器人主体内设有与吸尘罩连接的抽尘件,所述机器人主体靠近安装座一侧连接有用于调节安装架绕安装座轴线转动的调节件。
10.优选的,所述缓冲件包括固定套和衔接柱,所述固定套连接在机器人主体外侧壁,所述衔接柱连接在防撞条靠近机器人主体一侧,且衔接柱远离防撞条一端滑动设置在固定
套内,所述固定套内安装有弹簧。
11.优选的,所述抽尘件包括集尘箱和连接在集尘箱进尘端的引风管,所述引风管延伸出机器人主体连接在吸尘罩顶部,所述吸尘罩底部设有与引风管连通的进尘口,所述集尘箱出尘端连接风机,所述机器人主体上设有与风机出风口对应的排风罩。
12.优选的,所述吸尘罩顶部安装有用于驱动清理刷转动的驱动设备。
13.优选的,所述调节件包括电动伸缩杆,所述机器人主体靠近安装座一侧顶部设有与电动伸缩杆一端铰接的第一铰接座,所述安装架远离安装座一端顶部设有与电动伸缩杆另一端铰接的第二铰接座。
14.优选的,所述探照灯底部安装有灯头。
15.优选的,所述机器人主体靠近图像采集设备一侧安装避障传感器。
16.与现有技术相比,本实用新型的有益效果是:
17.本实用新型中图像采集设备设置在机器人主体一侧,且图像采集设备顶部设置探照灯,能对待检测路面进行照明,方便夜晚或光线不足时进行辅助照明,提高图像采集设备对道面的图像采集清晰度;
18.本实用新型中防撞条能起到一定的防撞功能,防撞条受撞击时,衔接柱受力挤压固定套内的弹簧,缓冲撞击力,减少机器人的损伤;
19.本实用新型中吸尘罩和清理刷设置机器人主体远离图像采集设备的一侧,使机器人前进时,能先进行图像采集,之后对路面清理;
20.本实用新型中调节件能调节安装架绕安装座的轴线转动,从而能调节清理刷远离地面,方便机器人在其他路面的行驶,且避免较大的地面障碍撞击吸尘罩和清理刷。
附图说明
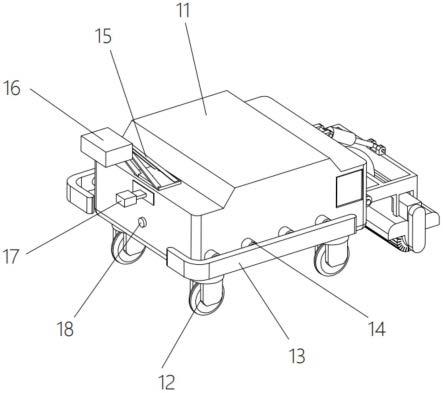
21.图1为本实用新型的结构示意图。
22.图2为本实用新型中安装架的结构示意图。
23.图3为本实用新型中吸尘罩底部的结构示意图。
24.图4为本实用新型中缓冲件的结构示意图。
25.图中:11、机器人主体;12、移动轮;13、防撞条;14、缓冲件;15、支架;16、探照灯;17、图像采集设备;18、避障传感器;19、安装架;20、安装座;21、吸尘罩;22、清理刷;23、驱动设备;24、引风管;25、电动伸缩杆;26、进尘口;27、固定套;28、衔接柱。
具体实施方式
26.请参阅图1-图4,本实用新型实施例中,一种带有防撞结构的机场道面安全检测机器人,包括机器人主体11和连接在机器人主体11底部的移动轮12,所述机器人主体11一侧连接图像采集设备17;图像采集设备17可选用现有安全检测机器人上安装的摄像设备;
27.所述机器人主体11靠近图像采集设备17一端的顶部通过支架15连接探照灯16,所述机器人主体11两侧均设有防撞条13,所述机器人主体11上设有用于安装防撞条13的缓冲件14;防撞条13能缓冲其他障碍物对机器人侧壁的撞击;
28.所述机器人主体11远离图像采集设备17一侧连接安装座20,所述安装座20铰接安装架19,所述安装架19底部连接吸尘罩21,所述吸尘罩21底部安装清理刷22,所述机器人主
体11内设有与吸尘罩21连接的抽尘件,所述机器人主体11靠近安装座20一侧连接有用于调节安装架19绕安装座20轴线转动的调节件;机器人前进时,图像采集设备17能先进行图像采集,之后清理刷22对路面清理。
29.所述缓冲件14包括固定套27和衔接柱28,所述固定套27连接在机器人主体11外侧壁,所述衔接柱28连接在防撞条13靠近机器人主体11一侧,且衔接柱28远离防撞条13一端滑动设置在固定套27内,所述固定套27内安装有弹簧;
30.障碍物撞击机器人或机器人撞击障碍物,防撞条13能起到一定的防撞功能,防撞条13受撞击时,衔接柱28受力挤压固定套27内的弹簧,缓冲撞击力,减少机器人的损伤。
31.所述抽尘件包括集尘箱和连接在集尘箱进尘端的引风管24,所述引风管24延伸出机器人主体11连接在吸尘罩21顶部,所述吸尘罩21底部设有与引风管24连通的进尘口26,所述集尘箱出尘端连接风机,所述机器人主体11上设有与风机出风口对应的排风罩;
32.风机工作能使集尘箱内产生负压,清理刷22将地面灰尘或小颗粒杂物扫起,灰尘或小颗粒杂物通过进尘口26进入吸尘罩21,之后通过引风管24进入集尘箱收集,洁净空气从排风罩排出。
33.所述吸尘罩21顶部安装有用于驱动清理刷22转动的驱动设备23;驱动设备23可根据实际需求选用,例如电机和传动皮带的结合设置。
34.所述调节件包括电动伸缩杆25,所述机器人主体11靠近安装座20一侧顶部设有与电动伸缩杆25一端铰接的第一铰接座,所述安装架19远离安装座20一端顶部设有与电动伸缩杆25另一端铰接的第二铰接座;电动伸缩杆25伸缩时,能带动安装架19绕安装座20轴线转动,从而能调节清理刷22远离地面,方便机器人在其他路面的行驶,且避免较大的地面障碍撞击吸尘罩21和清理刷22。
35.所述探照灯16底部安装有灯头;灯头照射方向为地面,能对待检测路面进行照明,方便夜晚或光线不足时进行辅助照明,提高图像采集设备17对道面的图像采集清晰度。
36.所述机器人主体11靠近图像采集设备17一侧安装避障传感器18,避障传感器18可选用现有的激光雷达避障传感器18,机器人在沿设定路线行驶时,如有较大阻碍物,机器人内部部件收到信号能避开阻碍。
37.本实用新型使用时,机器人在沿设定路线行驶,图像采集设备17能先进行图像采集,清理刷22将地面灰尘或小颗粒杂物扫起,灰尘或小颗粒杂物通过进尘口26进入吸尘罩21,之后通过引风管24进入集尘箱收集,洁净空气从排风罩排出,如有较大阻碍物,机器人内部部件收到避障传感器18的信号能避开阻碍,夜晚或光线不足时进行辅助照明,灯头照射方向为地面,能对待检测路面进行照明。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1