一种基于末反馈检测的轨道板精调系统及操作方法与流程
本发明涉及轨道板精调,具体为一种基于末反馈检测的轨道板精调系统及操作方法。
背景技术:
1、无砟轨道是指采用混凝土、沥青混合料等整体基础取代散粒碎石道床的轨道结构,又称作无碴轨道,是当今世界先进的轨道技术。其中,板式无砟轨道是一种由混凝土底座、ca砂浆层或自密实混凝土、轨道板、扣件和钢轨等部分组成的一种新型的轨道结构。
2、随着铁路行业的飞速发展,crtsⅲ型无砟轨道板也被广泛进行应用,其中在无砟轨道板进行铺设过程中,需要对无砟轨道板的位置进行精确的定位调节,因此需要使用连接无砟轨道板和地基的精调爪,但现有的补偿式精调爪在进行使用时,通过工人手动进行调节控制,因此需要使用工作对其调节高度进行精准控制,从而会导致工作人员进行反复测量调节,工作强度大,针对相关技术问题,尚未提出解决方案。
技术实现思路
1、针对相关技术中的问题,本发明提出一种基于末反馈检测的轨道板精调系统及其操作方法,以克服现有相关技术所存在的上述技术问题,本发明的目的是有效减少人工操作,对轨道板的调节精度高,末端可以精确到0.01mm,调整繁琐度大量减少,设备直接读取计算调整数据,有效避免人工口头传达出错。
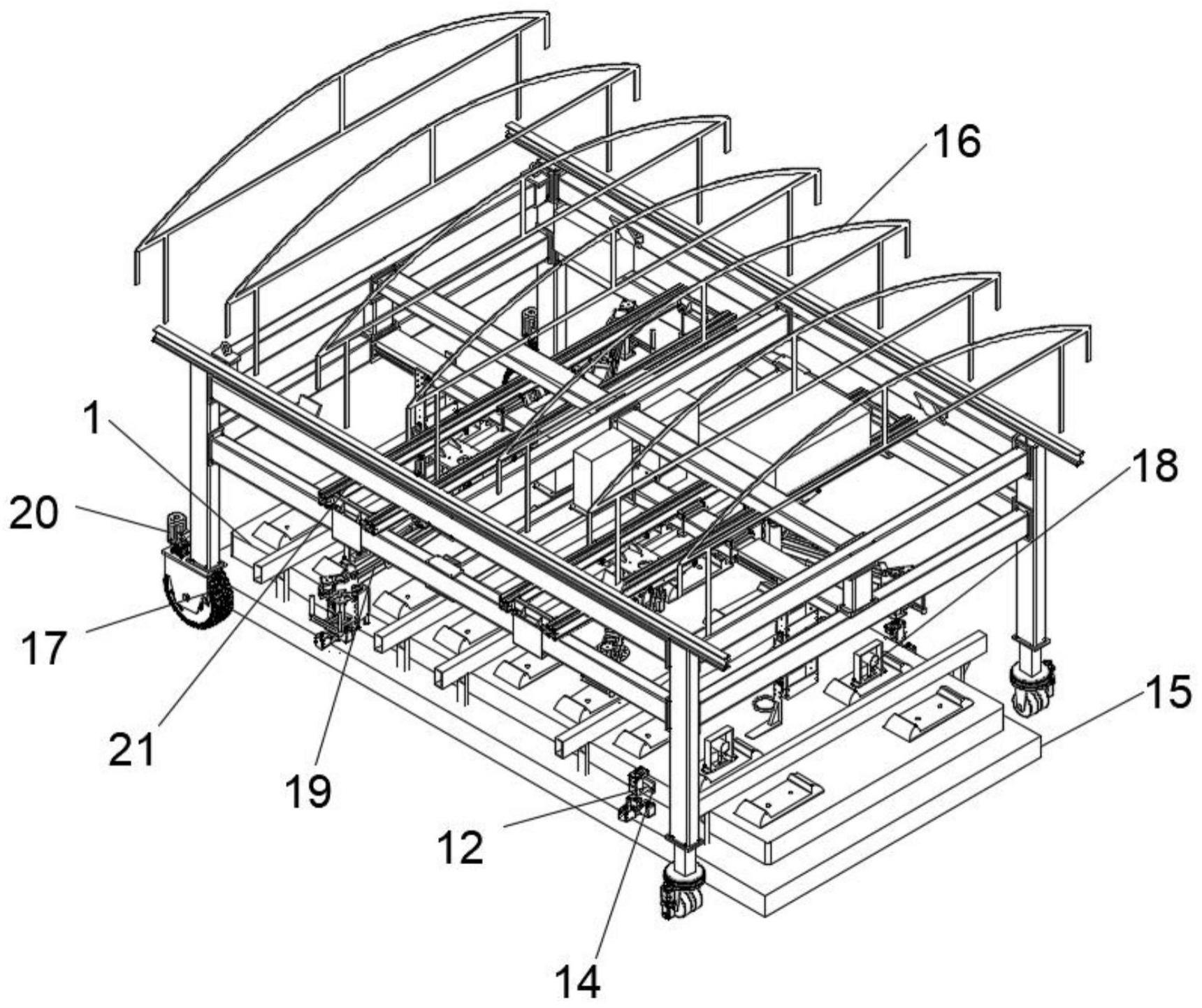
2、为实现上述目的,本发明提供如下技术方案:一种基于末反馈检测的轨道板精调系统,包括轨道板,所述轨道板的两侧均设置有精调爪,所述精调爪包括第一外壳、第二外壳和第三外壳,所述第一外壳上设置有第一螺杆、第一滑块和第一连接柱,所述第一螺杆的一端与第一外壳的侧壁活动连接,所述第一滑块套设在第一螺杆上,并与第一螺杆螺纹配合,所述第一连接柱穿设在第一外壳上,并与第一螺杆的另一端活动连接,所述第二外壳上设置有第二螺杆、第二滑块和第二连接柱,所述第二外壳的底部与第一滑块的顶部固定连接,所述第二螺杆的一端与第二外壳的侧壁活动连接,所述第二滑块套设在第二螺杆上,并与第二螺杆螺纹配合,所述第二连接柱穿设在第二外壳上,并与第二螺杆另一端活动连接,所述第三外壳上设置有第三螺杆、第三滑块和第三连接柱,所述第三螺杆的一端与第三外壳的侧壁活动连接,所述第三螺杆的另一端与第二滑块的顶部活动连接,所述第三滑块套设在第三螺杆上,并与第三螺杆螺纹配合,所述第三螺杆和第三连接柱活动连接,所述第三滑块的一侧固定连接有连接板,所述连接板和轨道板的侧壁连接,所述轨道板的底部设置有底座,所述轨道板的上方设置有框架,所述框架的底部设置有动力轮,所述轨道板的顶部安装有棱镜,所述框架上安装有传感器安装架,所述传感器安装架上安装有激光位移传感器。
3、优选的,所述框架上安装有若干个气动协力臂。
4、优选的,所述框架的底部安装有伺服电机,所述伺服电机与动力轮连接。
5、优选的,所述第一螺杆的另一端固定连接有锥齿轮一,所述第一连接柱的一端固定连接有锥齿轮二,所述锥齿轮一和齿轮二啮合。
6、优选的,所述第二螺杆的另一端固定连接有锥齿轮三,所述第二连接柱的一端固定连接有锥齿轮四,所述锥齿轮三和锥齿轮四啮合。
7、优选的,所述第三螺杆上固定套设有平齿轮一,所述第三连接柱的一端贯穿第三外壳并固定连接有平齿轮二,所述平齿轮一和平齿轮二啮合。
8、优选的,所述第一连接柱、第二连接柱和第三连接柱的一端均固定连接有精调电机。
9、一种基于末反馈检测的轨道板操作方法,包括以下步骤:
10、步骤一:通过精调控制设备采集激光位移传感器与精调标架的三维空间距离参数;
11、步骤二:全站仪将轨道板上的四个精调标架的坐标发送给精调控制设备,计算出与目标值的差值;
12、步骤三:精调控制设备将两组数据进行拟合,发送指令,控制精调数控扳手进行精调;
13、步骤四:每次调整后,精调控制设备采集激光位移传感器的数据,针对性的控制数控扳手,直至达到目标值;
14、步骤五:全站仪二次测量,达到标准要求后记录数据,调整下一块轨道板。
15、与现有技术相比,本发明的有益效果是:
16、本发明为一种基于末反馈检测的轨道板精调系统及操作方法,通过全站仪检测轨道板空间位置,分析计算差值,数据传输给精调控制设备,精调控制设备分布指令给精调电机带动精调爪动作,同时,在末端检测的传感器不断读取轨道板的运动变化量发送给精调控制设备,由程序判断是否补齐差值,初步精调完成后还要进行复测,有效解决了传统的通过人工传递信息数据不准确的问题,有效避免人工口头传达出错,减少大量人工操作,本设备的调节精度高,末端可以精确到0.01mm,设备调整1-2次内完成,调整繁琐度大量减少。
技术特征:
1.一种基于末反馈检测的轨道板精调系统,其特征在于,包括轨道板(1),所述轨道板(1)的两侧均设置有精调爪,所述精调爪包括第一外壳(2)、第二外壳(3)和第三外壳(4),所述第一外壳(2)上设置有第一螺杆(5)、第一滑块(6)和第一连接柱(7),所述第一螺杆(5)的一端与第一外壳(2)的侧壁活动连接,所述第一滑块(6)套设在第一螺杆(5)上,并与第一螺杆(5)螺纹配合,所述第一连接柱(7)穿设在第一外壳(2)上,并与第一螺杆(5)的另一端活动连接,所述第二外壳(3)上设置有第二螺杆(8)、第二滑块(9)和第二连接柱(10),所述第二外壳(3)的底部与第一滑块(6)的顶部固定连接,所述第二螺杆(8)的一端与第二外壳(3)的侧壁活动连接,所述第二滑块(9)套设在第二螺杆(8)上,并与第二螺杆(8)螺纹配合,所述第二连接柱(10)穿设在第二外壳(3)上,并与第二螺杆(8)另一端活动连接,所述第三外壳(4)上设置有第三螺杆(11)、第三滑块(12)和第三连接柱(13),所述第三螺杆(11)的一端与第三外壳(4)的侧壁活动连接,所述第三螺杆(11)的另一端与第二滑块(9)的顶部活动连接,所述第三滑块(12)套设在第三螺杆(11)上,并与第三螺杆(11)螺纹配合,所述第三螺杆(11)和第三连接柱(13)活动连接,所述第三滑块(12)的一侧固定连接有连接板(14),所述连接板(14)和轨道板(1)的侧壁连接,所述轨道板(1)的底部设置有底座(15),所述轨道板(1)的上方设置有框架(16),所述框架(16)的底部设置有动力轮(17),所述轨道板(1)的顶部安装有棱镜(18),所述框架(16)上安装有传感器安装架(21),所述传感器安装架(21)上安装有激光位移传感器。
2.根据权利要求1所述的一种基于末反馈检测的轨道板精调系统,其特征在于,所述框架(16)上安装有若干个气动协力臂(19)。
3.根据权利要求1所述的一种基于末反馈检测的轨道板精调系统,其特征在于,所述框架(16)的底部安装有伺服电机(20),所述伺服电机(20)与动力轮(17)连接。
4.根据权利要求1所述的一种基于末反馈检测的轨道板精调系统,其特征在于,所述第一螺杆(5)的另一端固定连接有锥齿轮一,所述第一连接柱(7)的一端固定连接有锥齿轮二,所述锥齿轮一和齿轮二啮合。
5.根据权利要求1所述的一种基于末反馈检测的轨道板精调系统及操作方法,其特征在于,所述第二螺杆(8)的另一端固定连接有锥齿轮三,所述第二连接柱(10)的一端固定连接有锥齿轮四,所述锥齿轮三和锥齿轮四啮合。
6.根据权利要求1所述的一种基于末反馈检测的轨道板精调系统,其特征在于,所述第三螺杆(11)上固定套设有平齿轮一,所述第三连接柱(13)的一端贯穿第三外壳(4)并固定连接有平齿轮二,所述平齿轮一和平齿轮二啮合。
7.根据权利要求1所述的一种基于末反馈检测的轨道板精调系统,其特征在于,所述第一连接柱(7)、第二连接柱(10)和第三连接柱(13)的一端均固定连接有精调电机。
8.一种基于末反馈检测的轨道板操作方法,其特征在于,包括以下步骤:
技术总结
本发明公开了一种基于末反馈检测的轨道板精调系统及操作方法,该精调系统包括轨道板,轨道板的两侧均设置有精调爪,精调爪包括第一外壳、第二外壳和第三外壳,第一外壳上设置有第一螺杆、第一滑块和第一连接柱,第二外壳上设置有第二螺杆、第二滑块和第二连接柱,第三外壳上设置有第三螺杆、第三滑块和第三连接柱,第三滑块的一侧固定连接有连接板,框架的底部设置有动力轮,轨道板的顶部安装有棱镜,框架上安装有传感器安装架,传感器安装架上安装有激光位移传感器。本发明结构新颖,减少人工操作,对轨道板的调节精度高,末端可以精确到0.01mm,调整繁琐度大量减少,设备直接读取计算调整数据,有效避免人工口头传达出错。
技术研发人员:路林海,罗鸿昌,刘瑞琪,王平,李大为,姜涛,俞文强,苏雅拉图,朱浩,傅重阳,万云乾,薛泽民,段久波,仇国元,王杰,张泽锋,秦洪建,曹宁,李孝棋,冯泽文,何芳,范立岩,王旭
受保护的技术使用者:中铁三局集团有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!