一种箱梁底板混凝土振捣装置、控制系统及其施工方法与流程
本发明涉及振捣领域,特别是一种箱梁底板混凝土振捣装置、控制系统及其施工方法。
背景技术:
1、箱梁具有强度高、刚度大、承载力强等优点,因此被广泛应用于桥梁建设中。通常,在箱梁施工过程中,完成底板钢筋和腹板钢筋的绑扎后即可安装部分内模进行底板部分的混凝土浇筑。在底板混凝土浇筑过程中,需要使用振捣棒对所浇筑的混凝土进行及时的振捣,将混凝土中的气泡排出,进而提高混凝土的密实性、保证混凝土的密实性、确保箱梁的施工质量。
2、箱梁底板部分的混凝土振捣通常采用人工振捣方式,即由工人手持电动振捣棒插入模板上的振捣孔内进行混凝土振捣,该种方式存在如下一定的局限性:1、凝土振捣需要根据施工要求对振捣棒的插拔速度、振捣时间和振捣深度等参数进行有效的控制,而人工振捣方式对上述参数的把控往往依靠操作经验,难以进行精准化的控制,因此对振捣的质量会造成一定的影响,从而影响混凝土的浇筑质量。2、由于箱梁底板的振捣量较大、振捣孔较多,因此需要多名工人同时开展振捣作业,一方面使用了较多人工,另一方面在多人作业时容易造成混凝土漏振的现象发生,因此既提高了施工成本又存在了一定程度的施工质量隐忧。3、振捣工具通常采用电缆供电,而施工现场往往条件较为复杂,因此工人在使用振捣工具工作时,既存在劳动强度大、施工效率低的问题,又存在一定程度的安全隐患。为此我们提出一种箱梁底板混凝土振捣装置、控制系统及其施工方法用于解决上述问题。
技术实现思路
1、本发明所要解决的技术问题是提供一种箱梁底板混凝土振捣装置、控制系统及其施工方法,解决箱梁底板混凝土的人工振捣方式存在着振捣往依靠操作经验,难以进行精准化的控制,对振捣的质量会造成一定的影响,影响混凝土的浇筑质量;施工人数多、劳动强度大、振捣质量难以保证、施工风险大的问题。
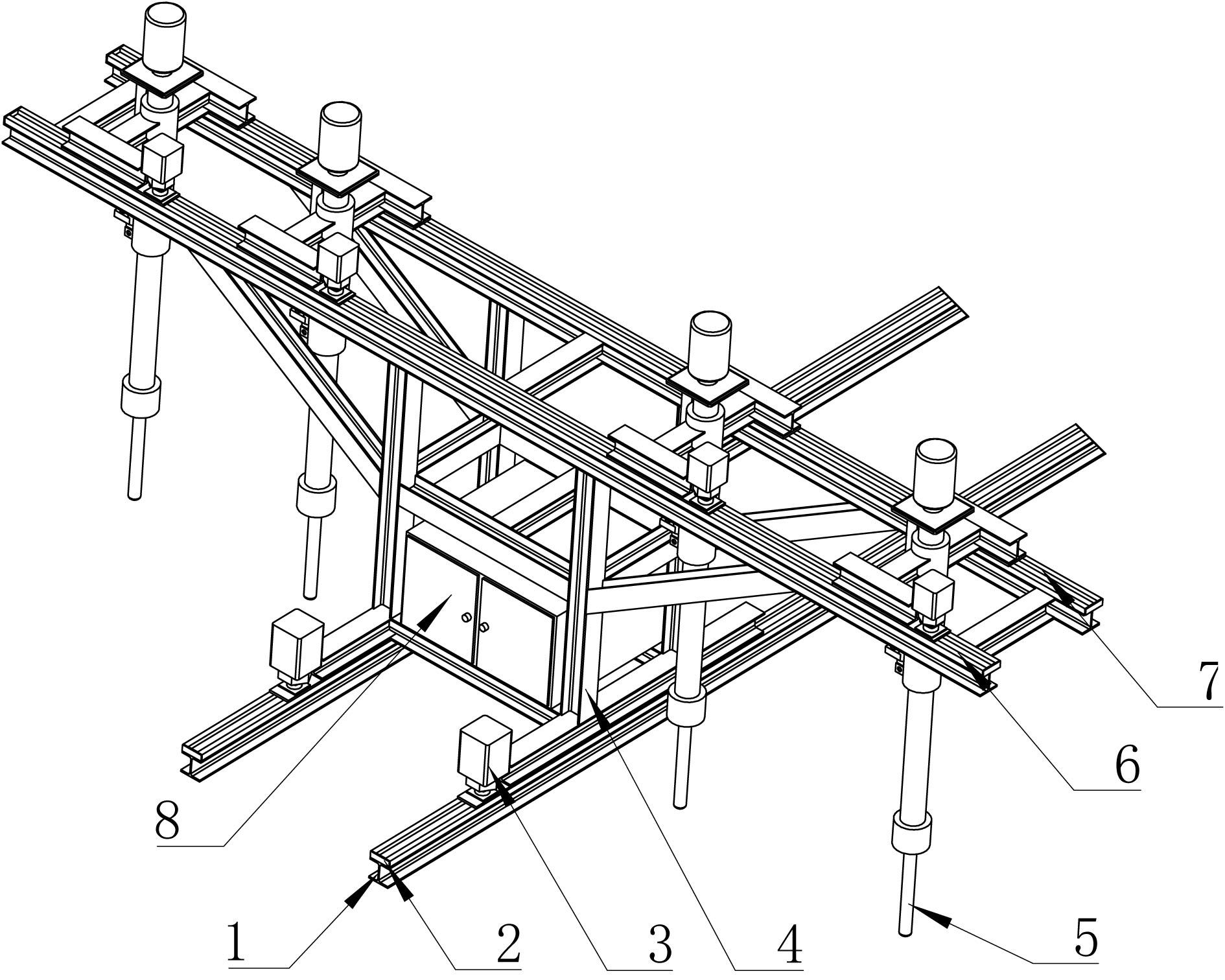
2、为解决上述技术问题,本发明所采用的技术方案是:一种箱梁底板混凝土振捣装置,包括架体,架体底部设有两个地轨型钢,架体顶部设有驱动轨道和从动轨道,驱动轨道和从动轨道顶部设有多个振捣装置,地轨型钢安装在箱梁底板上。
3、优选方案中,架体包括井支架,井支架底部设有两个下部行走梁,下部行走梁抵靠在地轨型钢上,下部行走梁与地轨型钢之间设有行走轨道,下部行走梁一端设有伺服电机组件,井支架顶部设有两个上部行走梁,井支架上设有电箱。
4、优选方案中,伺服电机组件包括端部的齿轮,行走轨道上设有齿条,伺服电机组件的齿轮与行走轨道的齿条啮合,两个上部行走梁分别设有驱动轨道和从动轨道,驱动轨道上设有第二齿条,从动轨道上设有轨道。
5、优选方案中,振捣装置包括行走支架,行走支架上设有升降套筒,升降套筒上设有振动器,行走支架在驱动轨道或从动轨道上滑动。
6、优选方案中,行走支架包括两个行走梁,一个行走梁一端设有移动电机组件,移动电机组件的齿轮与驱动轨道上的第二齿条啮合,另一个行走梁底部设有从动轮组件,从动轮组件的滚轮抵靠在从动轨道的轨道上。
7、优选方案中,升降套筒包括中空的外套筒和中空的内套筒,内套筒抵靠在外套筒上,内套筒一端设有减振夹持套,外套筒上设有下部耳板,下部耳板与伺服电缸一端连接。
8、优选方案中,振动器包括软管,软管贯穿升降套筒,软管一端设有振捣棒,软管另一端设有振动电机,软管上设有上法兰,上法兰伺服电缸一端连接,减振夹持套夹持振捣棒。
9、优选方案中,箱梁底板和地轨型钢之间设有内模板,内模板包括多个板面,板面,两个不同倾斜的板面之间设有多个撑杆,板面上设有多个振捣孔。
10、一种箱梁底板混凝土振捣装置的控制系统,其特征是:包括行走控制系统、移动控制系统、升降控制系统和振捣点位控制系统;
11、行走控制系统控制伺服电机组件和移动电机组件,实现架体的精准定位和自动行走;
12、移动控制系统控制移动电机组件,实现独立控制振捣装置在上部行走梁上的精准定位和自动行走;
13、升降控制系统控制伺服电缸,实现振捣参数的可控;
14、振捣点位控制系统:同步记录已经振捣完毕和未振捣的点位信息;根据各振捣点位的坐标值自动计算出行走控制系统、移动控制系统和升降控制系统的控制参数,进而将控制参数传入对应控制系统内。
15、一种箱梁底板混凝土振捣装置的施工方法,其方法是:s1 、振捣前准备:箱梁底板和箱梁腹板上铺设内模板,两个地轨型钢铺设在内模板上;
16、s2 、建立坐标系,并对架体进行定位:以其中一个地轨型钢的端部为坐标系原点,伺服电机组件、移动电机组件和伺服电缸归零,根据整体装置零位姿态,标定第一排至最后一排各振捣孔的坐标;
17、s3 、根据第一排振捣孔的坐标,计算出相应伺服电机组件、移动电机组件和伺服电缸的控制参数;
18、s4、根据控制参数控制伺服电机组件,驱动架体行走至第一排工作点位对应的位置;
19、s5、根据控制参数控制移动电机组件,驱动振捣装置移动至第一排工作点位对应位置的上方;
20、s6、开启振动器和伺服电缸,根据控制参数控制伺服电缸动作,进而驱动振捣棒插入第一排工作孔位的振捣孔中对箱梁底板进行振捣作业;
21、s7、第一排工作孔位振捣结束后,关闭振动器,将伺服电缸归零,将移动电机组件归零
22、s8、重复s3~s7,依次将第二排至最后一排振捣孔位进行振捣作业。
23、本发明提供了一种箱梁底板混凝土振捣装置、控制系统及其施工方法,驱动伺服电机组件,以使架体在行走轨道上移动,以使振捣装置相对于箱梁底板纵向移动,驱动移动电机组件,以使行走支架在上部行走梁上移动,以使振捣装置相对于箱梁底板横向移动,驱动伺服电缸,以使振动器相对于箱梁底板竖直高度上移动,驱动振动电机,以使振动器对振捣孔振捣。
24、架体采用桁架式结构,结合多点独立的振捣装置实现整体装置在工作面内行走和振捣点位的精准定位,一方面能够代替人工实现多点位同时振捣作业,另一方面能够根据作业点位信息避免漏振的现象发生,既降低了工程建设人工成本、减轻了劳动强度,又有效提高了施工安全和施工效率,同时也能够杜绝漏振的情况发生,保证振捣质量。
25、采用振捣装置进行箱梁底板的振捣作业,能够精准控制振捣棒的振捣时间、插拔速度和振捣深度,能够实现振捣参数的精细化控制,有效提高振捣质量,对提高箱梁建造质量有所助益。
26、架体采用桁架式结构,各独立的振捣装置能够根据振捣点位的不同进行自适应调整,能够适应多种类型和孔位的箱梁底板振捣作业,具有较好的应用场景拓展性。提出一种箱梁底板混凝土振捣装置的施工方法,通过振捣装置完成箱梁底板的自动化振捣作业,从而有效提高混凝土的振捣质量和振捣效率,减少施工安全风险,降低工程人工成本,同时提高桥梁工程领域施工的自动化和智能化水平,适合推广使用。
技术特征:
1.一种箱梁底板混凝土振捣装置,其特征是:包括架体(4),架体(4)底部设有两个地轨型钢(1),架体(4)顶部设有驱动轨道(6)和从动轨道(7),驱动轨道(6)和从动轨道(7)顶部设有多个振捣装置(5),地轨型钢(1)安装在箱梁底板(9)上。
2.根据权利要求1所述一种箱梁底板混凝土振捣装置,其特征是:架体(4)包括井支架(402),井支架(402)底部设有两个下部行走梁(401),下部行走梁(401)抵靠在地轨型钢(1)上,下部行走梁(401)与地轨型钢(1)之间设有行走轨道(2),下部行走梁(401)一端设有伺服电机组件(3),井支架(402)顶部设有两个上部行走梁(403),井支架(402)上设有电箱(8)。
3.根据权利要求2所述一种箱梁底板混凝土振捣装置,其特征是:伺服电机组件(3)包括端部的齿轮,行走轨道(2)上设有齿条,伺服电机组件(3)的齿轮与行走轨道(2)的齿条啮合,两个上部行走梁(403)分别设有驱动轨道(6)和从动轨道(7),驱动轨道(6)上设有第二齿条,从动轨道(7)上设有轨道。
4.根据权利要求1所述一种箱梁底板混凝土振捣装置,其特征是:振捣装置(5)包括行走支架(501),行走支架(501)上设有升降套筒(502),升降套筒(502)上设有振动器(507),行走支架(501)在驱动轨道(6)或从动轨道(7)上滑动。
5.根据权利要求4所述一种箱梁底板混凝土振捣装置,其特征是:行走支架(501)包括两个行走梁(5011),一个行走梁(5011)一端设有移动电机组件(503),移动电机组件(503)的齿轮与驱动轨道(6)上的第二齿条啮合,另一个行走梁(5011)底部设有从动轮组件(504),从动轮组件(504)的滚轮抵靠在从动轨道(7)的轨道上。
6.根据权利要求4所述一种箱梁底板混凝土振捣装置,其特征是:升降套筒(502)包括中空的外套筒(5021)和中空的内套筒(5023),内套筒(5023)抵靠在外套筒(5021)上,内套筒(5023)一端设有减振夹持套(506),外套筒(5021)上设有下部耳板(5022),下部耳板(5022)与伺服电缸(505)一端连接。
7.根据权利要求4所述一种箱梁底板混凝土振捣装置,其特征是:振动器(507)包括软管(5072),软管(5072)贯穿升降套筒(502),软管(5072)一端设有振捣棒(5073),软管(5072)另一端设有振动电机(5071),软管(5072)上设有上法兰(5024),上法兰(5024)伺服电缸(505)一端连接,减振夹持套(506)夹持振捣棒(5073)。
8.根据权利要求1所述一种箱梁底板混凝土振捣装置,其特征是:箱梁底板(9)和地轨型钢(1)之间设有内模板(11),内模板(11)包括多个板面(1101),板面(1101),两个不同倾斜的板面(1101)之间设有多个撑杆(1102),板面(1101)上设有多个振捣孔(1103)。
9.根据权利要求1~8中任意一项所述一种箱梁底板混凝土振捣装置的控制系统,其特征是:包括行走控制系统、移动控制系统、升降控制系统和振捣点位控制系统;
10.根据权利要求1~8中任意一项所述一种箱梁底板混凝土振捣装置的施工方法,其方法是:s1 、振捣前准备:箱梁底板(9)和箱梁腹板(10)上铺设内模板(11),两个地轨型钢(1)铺设在内模板(11)上;
技术总结
本发明提供一种箱梁底板混凝土振捣装置、控制系统及其施工方法,包括架体,架体底部设有两个地轨型钢,架体顶部设有驱动轨道和从动轨道,驱动轨道和从动轨道顶部设有多个振捣装置,地轨型钢安装在箱梁底板上。架体采用桁架式结构,各独立的振捣装置能够根据振捣点位的不同进行自适应调整,能够适应多种类型和孔位的箱梁底板振捣作业,具有较好的应用场景拓展性。提出一种箱梁底板混凝土振捣装置的施工方法,通过振捣装置完成箱梁底板的自动化振捣作业,从而有效提高混凝土的振捣质量和振捣效率,减少施工安全风险,降低工程人工成本,同时提高桥梁工程领域施工的自动化和智能化水平,适合推广使用。
技术研发人员:胡守增,程茂林,肖浩,董奇峰,吴中正,纪晓宇,程雪聪,陈斌,严双桥,余昌文,余万庆,朱明清,涂同珩,刘修成,方之遥
受保护的技术使用者:中交第二航务工程局有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!