一种舟桥动力固定控制系统的制作方法
本申请涉及舟桥作业,尤其涉及一种舟桥动力固定控制系统。
背景技术:
1、目前浮桥的水平固定常用的主要方法是:投锚固定和横张钢固定。投锚固定一般是通过舟桥上自身配置的制式锚投植到河底,为浮桥克服水阻力、风阻力等外力提供锚定力。投锚固定的效果将直接取决于河底地质条件和河流水深。横张纲固定是指在需要架设浮桥的江河两岸设置塔架,在塔架之间设置纲索,由纲索提供的系留力来克服浮桥在水中承受的水阻力、风阻力等外力。张钢固定适用于河幅不宽的中小江河上,但作业时间成倍增长。当前舟桥装备在架设浮桥时,一般均采用投锚固定。从使用情况来看,投锚作业虽然方便迅速,但有时因河底土壤的限制提供不了所需的锚定力,而有时由于流速较高且锚定时间较长时,锚与土壤抓得很紧,起锚作业非常耗时和费力。这就影响了浮、门桥的快速转换以及浮桥的快速分解和隐蔽。而且,在江河流速超过2.5m/s时的高流速条件下,它们都存在着水平固定方面的困难。这就不能适应现代战争的保障特点。随着上世纪90年代的几场高技术局部战争的发生,我们对观代战争的特点有了新的认识,对渡河工程保障的方式方法有了新的思考,通过借鉴国外先进的固定技术,认为浮桥固定技术需要出新和进步。因此,对舟桥动力固定的研究思考浮出水面,对动力固定关键技术研究的必要性认识也更加迫切。
技术实现思路
1、本发明的目的在于提供一种舟桥动力固定控制系统,该系统具备水上自动化、智能化能力,能够提高浮桥架设作业时间,保持浮桥的横向稳定性。
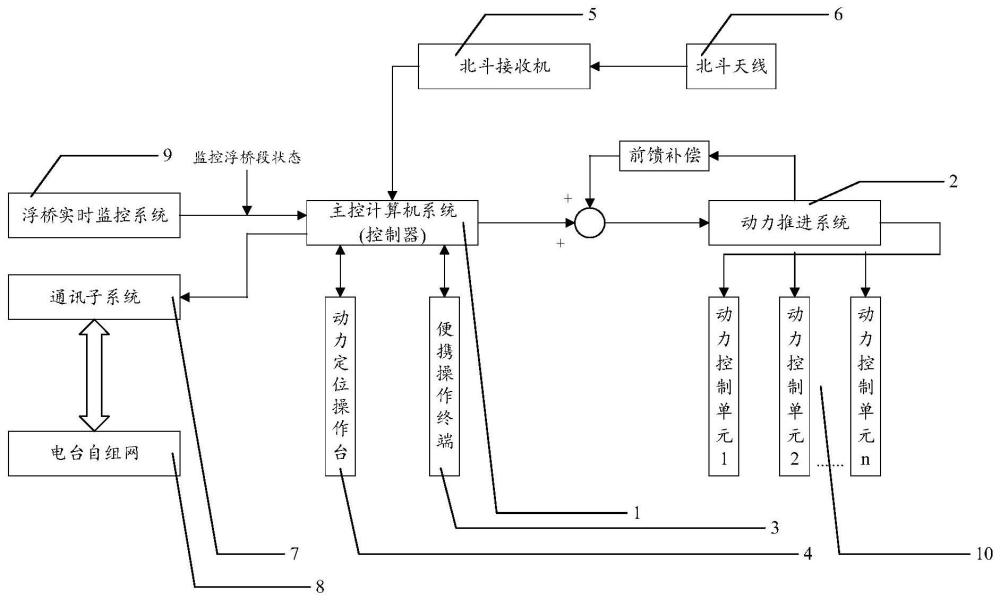
2、本发明实施例提供一种舟桥动力固定控制系统,包括:主控计算机系统、动力推进系统、便携操作终端、动力定位操作台、北斗接收机、北斗天线、通讯子系统、电台自组网、浮桥实时监控系统和动力控制单元;
3、根据河幅流场情况,划分浮桥动力单元,由所述北斗接收机和所述北斗天线组成测量子系统,测量出动力舟相对于某一参考点的位置,以及外部环境因素;
4、所述主控计算机系统首先根据外部环境条件计算出所受的外扰力,然后由此外力与测量所得位置,计算得到保持舟位置所需的作用力;
5、所述浮桥实时监控系统实时监控浮桥桥轴线的位置变化,传输到所述主控计算机系统进行动力自动协调分配,经所述动力推进系统传输到所述动力控制单元,自动控制动力舟的动力,以保持浮桥的横向稳定性。
6、在一些实施例中,所述动力定位操作台设置有供用户设定目标艏向角和目标位置的软件界面,主所述控计算机系统根据所述北斗接收机、所述北斗天线输出的信号和安装位置,利用向量法解算出实际艏向角和重心的实际位置或舟桥的任意位置,调用控制算法计算控制力和力矩指令,再根据所述动力推进系统的实际状态,调用推进器优化分配算法,输出每个推进器的发动机转速和舵角转角控制指令,舟桥在动力推进系统的控制下,将艏向角和位置保持在目标位置。
7、在一些实施例中,所述便携操作终端用于完成作业操作功能。
8、在一些实施例中,所述通讯子系统用于与外界交换信息,还能够用于与上级电台联络,形成所述电台自组网。
9、本发明上述实施例的有益效果包括:
10、未来舟桥的技术发展趋势必然是以适应长桥、深水和高流速为目标,动力锚定不需投起锚,架设速度快,不受河床土质和两岸地理条件影响,可短时间高效率保障一定的军事装备快速通过,具有良好的市场前景。
11、舟桥动力固定技术,可用于上一代某舟桥上,也可用于新研制的架桥汽艇,使得装备在江河的作战保障能力更好,江河的适应性能更强,装备的工程保障总体性能将上一个新台阶,为今后舟桥装备的全动力锚定提供技术基础。
技术特征:
1.一种舟桥动力固定控制系统,其特征在于,包括:主控计算机系统、动力推进系统、便携操作终端、动力定位操作台、北斗接收机、北斗天线、通讯子系统、电台自组网、浮桥实时监控系统和动力控制单元;
2.根据权利要求1所述的舟桥动力固定控制系统,其特征在于,所述动力定位操作台设置有供用户设定目标艏向角和目标位置的软件界面,主所述控计算机系统根据所述北斗接收机、所述北斗天线输出的信号和安装位置,利用向量法解算出实际艏向角和重心的实际位置或舟桥的任意位置,调用控制算法计算控制力和力矩指令,再根据所述动力推进系统的实际状态,调用推进器优化分配算法,输出每个推进器的发动机转速和舵角转角控制指令,舟桥在动力推进系统的控制下,将艏向角和位置保持在目标位置。
3.根据权利要求1所述的舟桥动力固定控制系统,其特征在于,所述便携操作终端用于完成作业操作功能。
4.根据权利要求1所述的舟桥动力固定控制系统,其特征在于,所述通讯子系统用于与外界交换信息,还能够用于与上级电台联络,形成所述电台自组网。
技术总结
本发明实施例公开了一种舟桥动力固定控制系统。包括:主控计算机系统、动力推进系统、便携操作终端、动力定位操作台、北斗接收机、北斗天线、通讯子系统、电台自组网、浮桥实时监控系统和动力控制单元;根据河幅流场情况,划分浮桥动力单元,由北斗接收机和北斗天线组成测量子系统,测量出动力舟相对于某一参考点的位置,以及外部环境因素;主控计算机系统首先根据外部环境条件计算出所受的外扰力,然后由此外力与测量所得位置,计算得到保持舟位置所需的作用力;浮桥实时监控系统实时监控浮桥桥轴线的位置变化,传输到主控计算机系统进行动力自动协调分配,经动力推进系统传输到动力控制单元,自动控制动力舟的动力,以保持浮桥的横向稳定性。
技术研发人员:邱磊,秦凡,李永,王百鹏
受保护的技术使用者:中国船舶重工集团应急预警与救援装备股份有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!