一种自主升降的智能越排障两栖栈桥及控制方法与流程
本发明涉及两栖登陆越障,尤其涉及一种自主升降的智能越排障两栖栈桥及控制方法。
背景技术:
1、在抢滩登陆作战中,卸载作业通常需要能适应海岸浅滩的栈桥来完成,栈桥要适应由浅水到滩地的连通运载作业,而其中阻碍栈桥工作的主要因素有两方面:
2、其一,滩地上的障碍,主要包括人工障碍与自然障碍。人工障碍有三角锥、泥泞地、阻绝墙和地(水)雷等;自然障碍有礁石群、断崖等。就人工障碍而言,目前我军传统的破障方式以火力破障为主要手段,如破障弹、破障艇、扫雷弹等;而以两栖工程作业车“挖掘、夹取、起重”残存的障碍为辅助手段,如三角锥等。然而,传统依靠密集火力破障的方式,并不能100%清除障碍,仍然需要两栖工程作业车辅助扫除,其效率不高。而自然障碍还没有快速有效的越障手段或装备。
3、其二,自然环境,如需要克服风浪、潮汐、海流等多种恶劣环境影响,这些因素都会影响登陆舰艇抵滩后30m至60m距离的涉水问题,尤其是大批量重载设备在近海的泥沙地容易发生陷落的现象,致使其无法移动。
4、如何快速扫除障碍与克服这些自然环境因素,从而开辟出数条登陆通路,则是目前登陆作战所面临的主要难题。
技术实现思路
1、本发明为了弥补现有技术的不足,提供了一种自主升降的智能越排障两栖栈桥及控制方法,它结构设计合理,操作简便,即使面对多种障碍的浅滩来说,也可以轻松的跨过沙滩上的障碍物,完成越障及顺利登陆,无需火力破障及辅助破障,简化流程,从而大大提高登陆效率,另外,可以实现大批量重载设备从母舰到近岸的卸载作业,使其顺利登陆,避免发生陷落于沙地而造成的无法移动,具有运输速度快,登陆速度快,卸载效率高的特点,从而开辟出数条登陆通路,填补了在抢滩登陆中所面临的技术难题。
2、本发明为解决上述技术问题所采用的技术方案是:
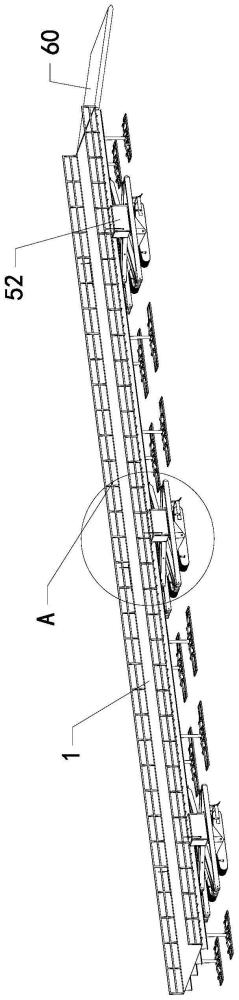
3、一种自主升降的智能越排障两栖栈桥,包括底盘桁架和设置在底盘桁架底部的若干组跨障行走机构与辅助支撑机构,各所述跨障行走机构包括行走机构,所述行走机构通过剪叉升降机构与底盘桁架相连,在对应各组跨障行走机构与辅助支撑机构位置的底盘桁架底部分别设有动力传动机构,在底盘桁架一端活动铰接过渡机构;各所述跨障行走机构、动力传动机构分别与控制装置相连。
4、可选地,各所述跨障行走机构、辅助支撑机构分别呈矩阵式排布,且跨障行走机构与辅助支撑机构交错设置。
5、可选地,所述行走机构包括履带式行走机构,所述履带式行走机构包括水平设置的长梁,在长梁左端设有环形槽梁,在长梁右端竖直设有方形槽梁,在长梁的环形槽梁内设有驱动轮,在长梁一侧设有与驱动轮相连的液压马达,在长梁的方形槽梁内设有引导轮,在靠方形槽梁一侧的长梁内设有与引导轮相配合的履带张紧装置,在长梁表面沿其长度方向间隔设有若干个托链轮,各所述托链轮分别通过设置在其前后两端的承托块与长梁相连,在长梁底部沿其长度方向均匀间隔设有若干个支撑轮卡槽,在各个支撑轮卡槽内分别卡接支撑轮,一履带链板依次绕设在引导轮、支撑轮、驱动轮与托链轮上,在履带链板前后两侧分别设有护板,在长梁左右两端分别设有水平平行设有支撑轴,各根支撑轴的外轴端分别活动穿出对应一侧的护板与限位机构相连,在长梁中部设有垂直穿过长梁侧壁的负载轴,负载轴前后前后两端分别活动穿出对应一侧的护板与设置在行走机构上方的剪叉升降机构相连,在各个负载轴两端均套设与对应一侧长梁侧壁相连的轴端支撑罩,在长梁内的负载轴上套设支撑轴套,支撑轴套的前后两端分别抵接在长梁的内壁上,各所述限位机构均抵接在剪叉升降机构的底部;所述液压马达经导线与控制装置相连。
6、可选地,所述破障机构包括水平对称设置在方形槽梁前后两侧的破障支撑轴,两根破障支撑轴的外端均活动穿出对应一侧的护板与一u型架活动相铰接,在u型架上设有破障铲,在u型架中央设有下铰接座,在破障支撑轴上方的方形槽梁上设有行架,行架的下部分别穿过相应一侧的护板固连在方形槽梁的侧壁上,在行架顶部中央设有上铰接座,一破障液压缸的缸座活动铰接在上铰接座上,其活塞杆则活动铰接在下铰接座上;所述破障液压缸经导线与控制装置相连。
7、可选地,在各根支撑轴上均设有与护板相连的加固件,所述加固件包括固定套接在支撑轴上的套环,在套环外侧壁上沿其圆周方向设有若干个支杆,各所述支杆分别与护板的内侧壁相连。
8、可选地,所述限位机构包括分别竖直设置在护板外侧、与各根支撑轴固连的螺纹轴,在各根螺纹轴上端均设有与其螺纹相连的调节轴套,在调节轴套上设有抵接在剪叉升降机构底部的垫块。
9、可选地,所述剪叉升降机构包括两根平行设置的支撑方管,在两根支撑方管通过设置在其右端的支撑销轴相连,在两根支撑方管底部中央分别竖直设有与对应一侧负载轴轴端相连的负载支撑腿,在支撑方管上方设有与其平行设置的桁架支撑板,在左端一侧的桁架支撑板底部设有滑动座,在滑动座底部前后两侧分别沿其长度方向对称设有上滑槽,在右端一侧的桁架支撑板底部设有剪叉铰接座;在左端一侧的两根支撑方管之间设有外剪叉臂架,在左端一侧的两根支撑方管内壁上分别沿其水平方向对称设有下滑槽,在外剪叉臂架下端前后两侧分别对称设有卡接在对应一侧支撑方管内的下滑轮,各所述下滑轮的转轴均活动卡接在对应一侧的下滑槽内,所述外剪叉臂架的上端活动铰接在桁架支撑板的剪叉铰接座上;在外剪叉臂架内设有与其活动相铰接的内剪叉臂架,内剪叉臂架的下端活动铰接在两根支撑方管之间的支撑销轴上,其上端则分别设有上滑轮,各所述上滑轮分别活动卡接在滑动座对应一侧的上滑槽内,在外剪叉臂架内壁之间与内剪叉臂架内壁之间分别水平设有连接方管,在外剪叉臂架内设有第一伸缩液压缸,第一伸缩液压缸的缸底活动铰接在外剪叉臂架底部,其活塞杆则活动铰接在内剪叉臂架一侧的连接方管上,在内剪叉臂架内设有第二伸缩液压缸,第二伸缩液压缸的缸底活动铰接在内剪叉臂架底部,其活塞杆则活动铰接在外剪叉臂架一侧的连接方管上;在桁架支撑板上间隔设有若干个与底盘桁架相连的桁架连接梁;所述第一伸缩液压缸、第二伸缩液压缸分别经导线与控制装置相连。
10、可选地,所述辅助支撑机构包括设置在底盘桁架底部的下压连接板,在下压连接板底部中央竖直设有液压缸,在液压缸下方设有下压支撑板,在下压支撑板中央设有球铰支座,所述液压缸的活塞杆设有与球铰支座相连的球铰,在下压支撑板表面两侧分别沿其长度方向开设若干个辅助轮卡槽,在各个辅助轮卡槽内均活动卡设辅助轮;所述液压缸经导线与控制装置相连。
11、可选地,所述过渡机构包括收放渡板,在铰接端一侧的收放渡板前后两侧对称设有翻转座,在各个翻转座前后两侧的底盘桁架上分别对应设有与之相卡接在夹板,各所述翻转座通过翻转轴与相应一侧的两个夹板相连,在底盘桁架外壁上设有与其中一根翻转轴相连的螺旋摆动缸;螺旋摆动缸经导线与控制装置相连。
12、可选地,所述动力传动机构包括置物箱,在置物箱内设有发电机,在发电机一侧的置物箱内设有液压站,在置物箱内设有与液压站相连通的油箱,所述液压站经油管分别与液压马达、第一伸缩液压缸、第二伸缩液压缸、液压缸与螺旋摆动缸相连,在各根油管上均设有负载敏感泵、比例多路阀与双向平衡阀;所述发电机、液压站分别经导线与控制装置相连。
13、可选地,还包括检测机构,所述检测机构包括第一测距传感器、第二测距传感器、第三测距传感器、姿态陀螺仪、辅助支撑压力传感器、剪叉位移传感器与剪叉压力传感器,各所述第一测距传感器分别对应设置在各组跨障行走机构一侧的底盘桁架底部,在前后相邻的两组辅助支撑机构之间的底盘桁架底部设有第二测距传感器,在远离过渡机构一端的底盘桁架侧壁上设有第三测距传感器,在对应第一测距传感器、第二测距传感器位置的底盘桁架表面分别设有姿态陀螺仪,在各组剪叉升降机构的下部均设有测量底盘桁架底部距离的剪叉位移传感器,在各组剪叉升降机构的第一伸缩液压缸与第二伸缩液压缸内均设有剪叉压力传感器,在各组辅助支撑机构的液压缸内均设有辅助支撑压力传感器。
14、一种两栖栈桥的控制方法,包括如下步骤:
15、步骤一:当搭载该两栖栈桥的平台到达指定位置后,控制装置通过动力传动机构控制各组跨障行走机构中的液压马达启动,液压马达带动驱动轮转动,进而驱动履带链板转动,使两栖栈桥从平台向外移出;
16、步骤二:当底盘桁架前端的两组跨障行走机构向外移出平台并处于悬空状态时,控制装置通过动力传动机构控制剪叉升降机构的第一伸缩液压缸与第二伸缩液压缸做伸出运动,从而推动外剪叉臂架与内剪叉臂架沿着铰接点向内闭合,进而通过剪叉升降机构向下推动行走机构,待行走机构的履带链板接触滩地后,停止剪叉升降机构运动,使两栖栈桥的前部着地;
17、步骤三:继续驱动两栖栈桥向外移动,直至底盘桁架中部的两组跨障行走机构向外移平台出并处于悬空状态,按步骤二所述,使该侧的履带链板接触滩地后,从而使两栖栈桥的中部着地;
18、步骤四:继续驱动两栖栈桥向外移动,直至底盘桁架尾部的两组跨障行走机构向外移平台出并处于悬空状态,按步骤二所述,使该侧的履带链板接触滩地后,从而使两栖栈桥的尾部着地;
19、步骤五:若其中一组跨障行走机构,在滩地上行走遇障时,若障碍较小,通过破障机构直接进行清理,若障碍较大,则控制装置通过动力传动机构将剪叉升降机构收起,待行走机构跨越障碍物后,重新使行走机构接触滩地;
20、步骤六:待两栖栈桥完全移出后,控制装置通过动力传动机构控制液压缸启动,从而使各组设置在底盘桁架底部的各组辅助支撑机构,稳定的支撑在滩地上;
21、步骤七:控制装置通过动力传动机构控制螺旋摆动缸启动,从而使收放渡板向外翻动,或是使收放渡板抵接在滩地上形成下坡面,或是搭接在另一组两栖栈桥的底盘行架上。
22、本发明采用上述技术方案,具有的优点有:
23、1、结构设计合理,操作简便,即使面对多种障碍的浅滩来说,也可以轻松的跨过沙滩上的障碍物,完成越障及顺利登陆,无需火力破障及辅助破障,简化流程,从而大大提高登陆效率;
24、2、可以实现大批量重载设备从母舰到近岸的卸载作业,使其顺利登陆,避免发生陷落于沙地而造成的无法移动,具有运输速度快,登陆速度快,卸载效率高的特点;
25、3、通过剪叉升降机构可以轻松实现甲板的平稳着陆,从而适用于不同的登陆点,提高通用性,降低对登陆点这个因素的考虑,并且,通过剪叉机构,可以完成对较大的障碍物的跨越,提高装置整体的通过性;
26、4、通过履带式行走机构可以在着陆后,完全抵接在浅滩上并进行爬坡移动,并且对不同坡度进行调整,从而适用于不同海滩坡度,提高通用性;
27、5、通过破障机构,可以推动较小的障碍物,使其不影响履带机构的行进路线;
28、6、通过收放渡板,完成甲板与滩地的过渡,可以使大批量重载设备顺利完成登陆。
- 还没有人留言评论。精彩留言会获得点赞!