一种清洁机器人用伸缩清洁模块的制作方法
本技术涉及清洁设备,具体为一种清洁机器人用伸缩清洁模块。
背景技术:
1、清扫车是集路面清扫、垃圾回收和运输为一体的新型高效清扫设备,是一种适合室内外地面全方位清扫工作的车型设备。清扫车往往设有对地面进行清洁的清洁模块,如边刷,在现有技术中,在需要清洁更大面积的地面时,清洁模块的面积也需要变大,这使得清扫车的整体体积变大,同时在对清扫车进行收纳时也需要占用更大空间,整体结构不够紧凑。
2、如申请号:cn202121189066.1,提供了一种伸缩清洁模块及清扫车,属于清洁设备技术领域。该伸缩清洁模块包括伸缩部件,所述伸缩部件具有动力输出端;连杆组件,所述连杆组件的第一端与所述伸缩部件的动力输出端铰链连接;清洁件,所述清洁件与所述连杆组件的第二端连接,所述清洁件用于对地面进行清洁,实现了清洁件面积不变的情况下,通过伸缩部件带动清洁件运动,从而清洁更大面积的地面,在收纳时,通过伸缩部件将清洁件收回,使得设备整体体积变小,整体结构紧凑性更好。
3、类似于上述申请的一种伸缩清洁模块及清扫车目前还存在以下不足:上述装置设置的毛刷在进行转动时,第一清洁件的中部没有设置毛刷,中间部分清洁效果不够明显,所任增大了清洁面积,但是增大有限,不能根据需求进行调节。
4、于是,有鉴于此,针对现有的结构及缺失予以研究改良,提出一种清洁机器人用伸缩清洁模块,以达到更具有实用价值的目的。
技术实现思路
1、本实用新型的目的在于提供一种清洁机器人用伸缩清洁模块,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种清洁机器人用伸缩清洁模块,包括连接块,所述连接块的一侧设置有第一连杆,所述连接块远离第一连杆的一侧设置有第二连杆,所述连接块的上方设置有保护罩,所述连接块的侧壁均设置有滑轨,所述连接块的内腔设置有第一气缸,所述第一气缸的上方设置有第二气缸,所述第一连杆的一侧设置有第一滑块,所述第二连杆的一侧设置有第二滑块,且第一连杆与第二连杆的底端面均设置有毛刷。
3、优选的,还包括:
4、所述保护罩的内腔均设置有气泵,且气泵的输出端通过气管与气缸构成连通结构。
5、优选的,还包括有:
6、所述第一滑块嵌合在滑轨的内端,且连接块侧壁设置的滑轨与第一连杆一侧设置的第一滑块构成滑动机构。
7、优选的,还包括有:
8、所述第二滑块嵌合在滑轨的内端,且连接块侧壁设置的滑轨与第二连杆一侧设置的第二滑块构成滑动机构。
9、优选的,还包括有:
10、所述第一气缸的一端设置有第一连接杆,且第一连接杆与第一连杆一侧设置的第一滑块构成卡合结构。
11、优选的,还包括有:
12、所述第二气缸的一端设置有第二连接杆,而且第二连接杆与第二连杆的一侧设置有第二滑块构成卡合结构。
13、与现有技术相比,本实用新型的有益效果是:此装置通过连接块两侧壁的滑轨与第一连杆和第二连杆构成滑动机构,从而使第一连杆和第二连杆,以连接块为中心,利用气泵与气缸向连接块两端移动,从而使清洁模块的长度延长,清洁模块的长度得到延长,从而使清洁模块在转动清洁面积更大,且,在对清洁模块进行收缩时,此装置更加节省空间,通过控制气泵对气缸内冲压,从而使气缸带动第一连杆与第二连杆移动,且可根据需求调节所清洁的面积,在清洁结束过后,通过气泵、气缸、第一滑块、滑轨、第一连接杆和第二连接杆将清洁件收回,使得设备整体体积变小,整体结构紧凑性更好。
技术特征:
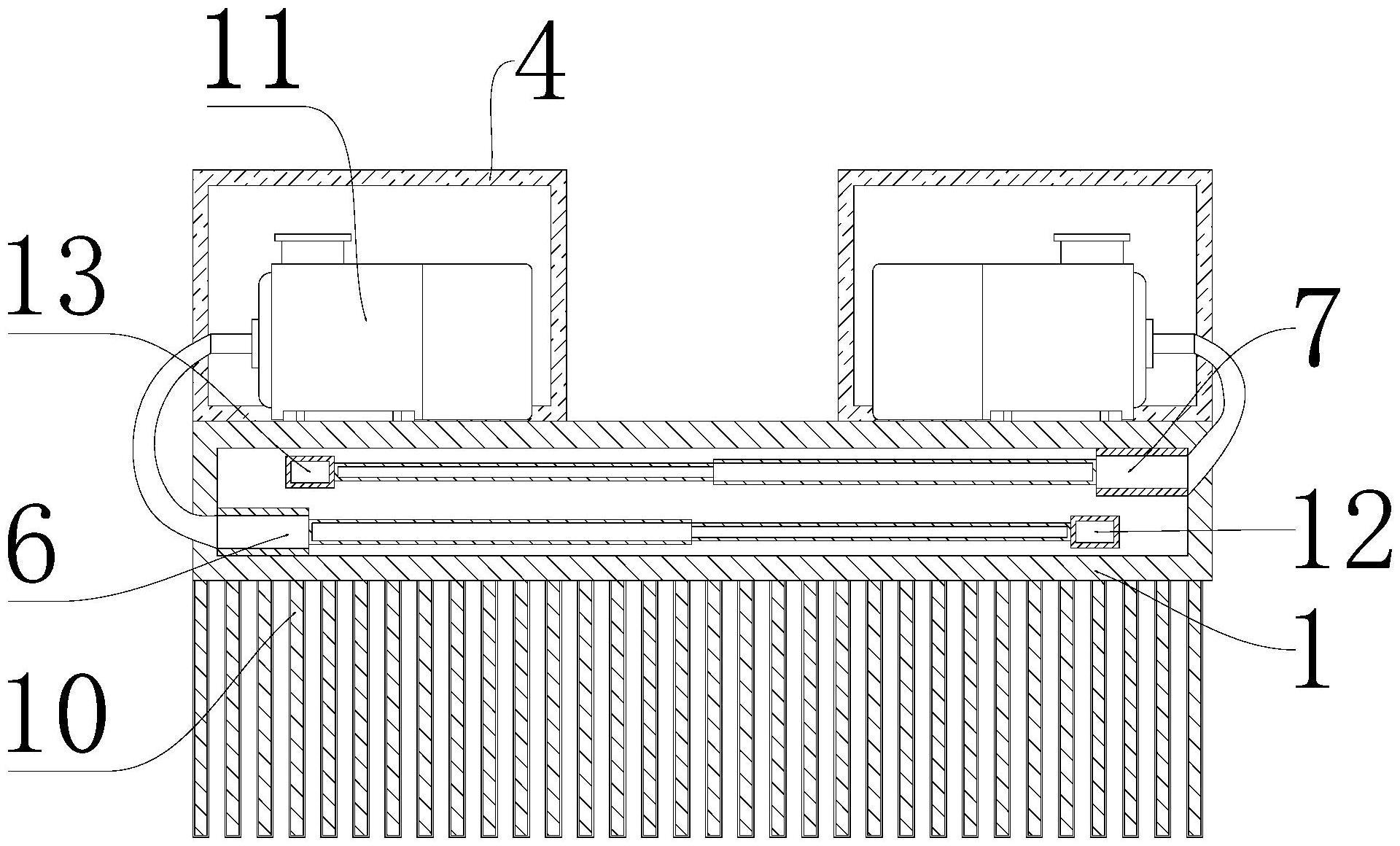
1.一种清洁机器人用伸缩清洁模块,其特征在于,包括连接块(1),所述连接块(1)的一侧设置有第一连杆(2),所述连接块(1)远离第一连杆(2)的一侧设置有第二连杆(3),所述连接块(1)的上方设置有保护罩(4),所述连接块(1)的侧壁均设置有滑轨(5),所述连接块(1)的内腔设置有第一气缸(6),所述第一气缸(6)的上方设置有第二气缸(7),所述第一连杆(2)的一侧设置有第一滑块(8),所述第二连杆(3)的一侧设置有第二滑块(9),且第一连杆(2)与第二连杆(3)的底端面均设置有毛刷(10)。
2.根据权利要求1所述的一种清洁机器人用伸缩清洁模块,其特征在于,所述保护罩(4)的内腔均设置有气泵(11),且气泵(11)的输出端通过气管与气缸构成连通结构。
3.根据权利要求2所述的一种清洁机器人用伸缩清洁模块,其特征在于,所述第一滑块(8)嵌合在滑轨(5)的内端,且连接块(1)侧壁设置的滑轨(5)与第一连杆(2)一侧设置的第一滑块(8)构成滑动机构。
4.根据权利要求3所述的一种清洁机器人用伸缩清洁模块,其特征在于,所述第二滑块(9)嵌合在滑轨(5)的内端,且连接块(1)侧壁设置的滑轨(5)与第二连杆(3)一侧设置的第二滑块(9)构成滑动机构。
5.根据权利要求4所述的一种清洁机器人用伸缩清洁模块,其特征在于,所述第一气缸(6)的一端设置有第一连接杆(12),且第一连接杆(12)与第一连杆(2)一侧设置的第一滑块(8)构成卡合结构。
6.根据权利要求5所述的一种清洁机器人用伸缩清洁模块,其特征在于,所述第二气缸(7)的一端设置有第二连接杆(13),而且第二连接杆(13)与第二连杆(3)的一侧设置有第二滑块(9)构成卡合结构。
技术总结
本技术公开了一种清洁机器人用伸缩清洁模块,包括:包括连接块,连接块的一侧设置有第一连杆,连接块远离第一连杆的一侧设置有第二连杆,连接块的上方设置有保护罩,连接块的侧壁均设置有滑轨,连接块的内腔设置有第一气缸,第一气缸的上方设置有第二气缸,第一连杆的一侧设置有第一滑块,第二连杆的一侧设置有第二滑块,且第一连杆与第二连杆的底端面均设置有毛刷,保护罩的内腔均设置有气泵,且气泵的输出端通过气管与气缸构成连通结构,第一滑块嵌合在滑轨的内端,且连接块侧壁设置的滑轨与第一连杆一侧设置的第一滑块构成滑动机构,第二滑块嵌合在滑轨的内端,且连接块侧壁设置的滑轨与第二连杆一侧设置的第二滑块构成滑动机构。
技术研发人员:陶松兵,马宏莉
受保护的技术使用者:凌坤(南通)智能科技有限公司
技术研发日:20230108
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!