一种用于波折板铺设的移动机器人的制作方法
本技术涉及在h型钢上铺设波折板的,特别是一种用于波折板铺设的移动机器人。
背景技术:
1、一段桥梁修建的过程是:先在地基的基础上施工出两根混凝土墩柱,而后在墩柱之间搭建相互平行的h型钢,随后在两个h型钢之间沿其长度方向铺设多个波折板,最后进行后续的混凝土浇筑施工,从而最终完成一段桥梁的修建,其中,波折板的结构如图1所示,它包括板体,板体的两个长边缘处均焊接有挡板31。为了完成波折板的铺设,目前采用吊车吊装的方式将波折板铺设在h型钢上,其具体的操作方法是:吊车司机操作吊车的伸缩臂先将地面上的波折板吊起,而后站在高处的工人指挥吊车司机操作,以确保被吊起来的铺设在两个h型钢之间,从而实现了第一个波折板的铺设,如此重复操作,即可在两个h型钢之间铺满波折板。
2、然而,采用吊装的方式虽然能够实现波折板的铺设,但是在实际的使用过程中,仍然体现出以下技术缺陷:
3、i、从波折板的吊起到铺设,所用时间长,因此一个的波折板铺设时间较长,而铺设数量较多,这无疑是增加了波折板的铺设效率。ii、需要多个工人协同操作,才能完成一个波折板的铺设,这无疑是又增加了工人的工作强度。因此,亟需一种极大提高波折板铺设效率、减轻工人工作强度的移动机器人及其工作方法。
技术实现思路
1、本实用新型的目的在于克服现有技术的缺点,提供一种结构紧凑、极大提高波折板铺设效率、减轻工人工作强度、自动化程度高的用于波折板铺设的移动机器人。
2、本实用新型的目的通过以下技术方案来实现:一种用于波折板铺设的移动机器人,它包括行走机构、设置于行走机构上的机械手臂、设置于机械手臂的执行端上用于抓取波折板的抓取机构,所述行走机构包括底框、固设于底框后边上的减速器i和两个减速器ii,减速器i的顶部固设有驱动电机,驱动电机与减速器i的输入轴连接,位于减速器i左右侧的输出轴上均连接有传动轴,两个传动轴分别与两个减速器ii的输入轴连接,位于两个减速器ii前侧的输出轴上均连接有丝杆,两个丝杆均旋转安装于底框的前边上;
3、两个丝杆之间设置有两个拱形梁,拱形梁的左右端部均螺纹连接于两个丝杆上,拱形梁左右端部的底表面上均转轴旋转安装有转盘,转盘的底表面上固设有支撑于地面上的从动轮,两个拱形梁上均设置有立式舵轮总成,立式舵轮总成的主动轮支撑于地面上,且主动轮与从动轮平行设置。
4、所述底框的前后边之间固设有两个导向杆,导向杆设置于丝杆的下方,导向杆贯穿拱形梁设置。
5、所述拱形梁左右端部的内壁上均固设有螺母,两个螺母分别螺纹连接于两个丝杆上。
6、所述底框的右边上固设有用于存放波折板的板架。
7、位于前侧的立式舵轮总成的安装板设置于拱形梁拱形端的正下方,立式舵轮总成的舵机和行走电机设置于安装板的上方,立式舵轮总成的主动轮设置于安装板的下方,安装板与拱形梁的拱形端之间铰接有连杆,连杆的上端部固设有环形板,连杆上套设有弹簧,弹簧的一端固设于环形板上,另一端固设于安装板的顶表面上,在弹簧的弹力下,主动轮与地面紧密接触;所述立式舵轮总成上设置有用于驱动从动轮转向的转向机构,转向机构包括转向电缸和转向杆,转向杆的两端分别铰接于两个从动轮的转盘上,转向电缸的活塞杆固设于转向杆上。
8、所述抓取机构包括吸盘、电磁铁、固设于机械手臂的执行端底部的环形座,环形座的底部固设有吸盘,所述吸盘的底表面上且位于其四个角落处均固设有电磁铁,位于前侧的两个电磁铁与位于后侧的两个电磁铁之间设置有两个固设于吸盘底表面上的双作用电缸,双作用电缸的两个活塞杆的作用端上均固设有橡胶压头。
9、所述底框的顶表面上固设有电池,电池与机械手臂、行走电机、舵机和电磁铁,该机器人还包括远程控制器,所述远程控制器与舵机、行走电机、驱动电机、机械手臂和转向电缸连接。
10、本实用新型具有以下优点:本实用新型结构紧凑、极大提高波折板铺设效率、减轻工人工作强度、自动化程度高。
技术特征:
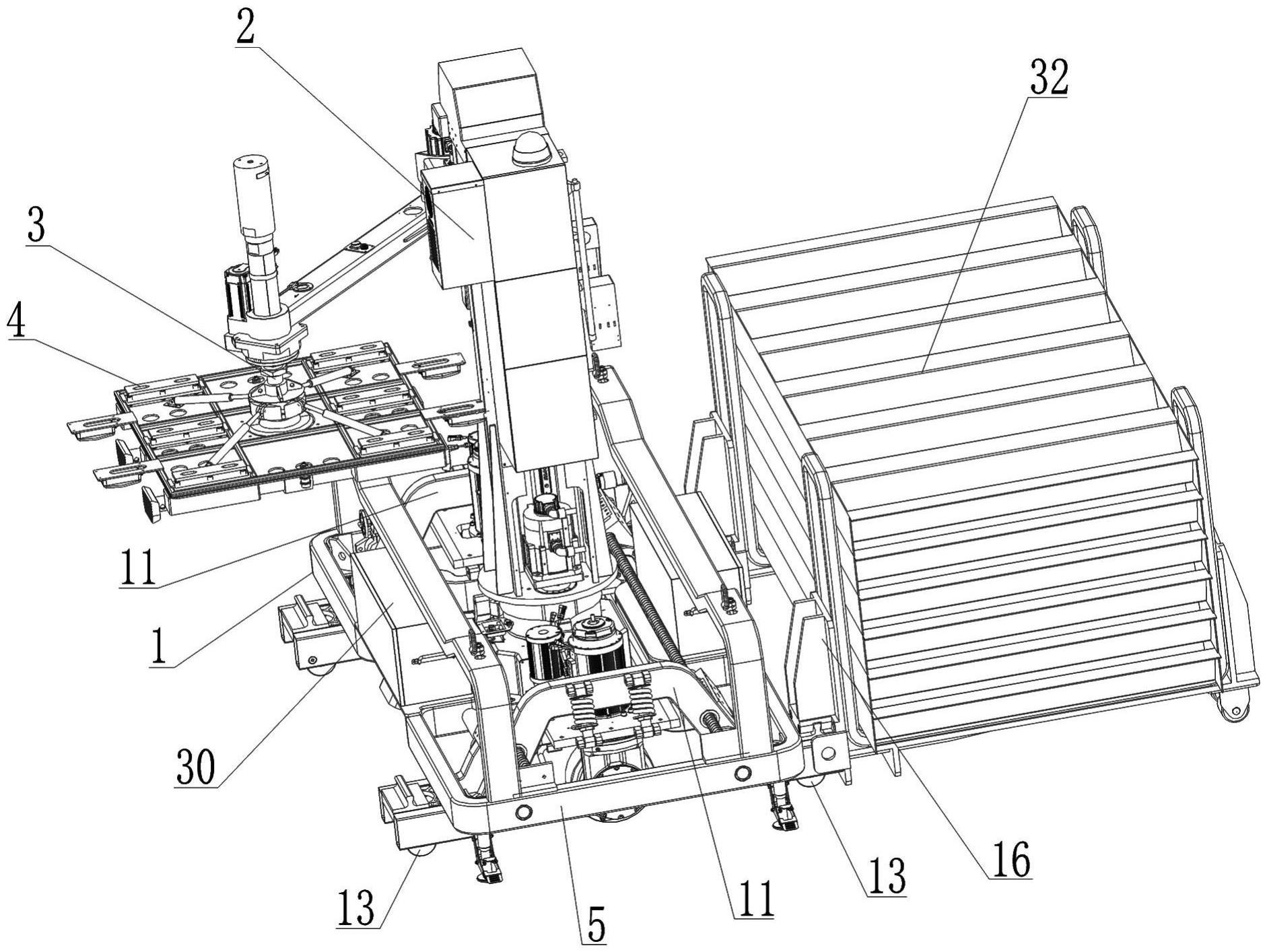
1.一种用于波折板铺设的移动机器人,其特征在于:它包括行走机构(1)、设置于行走机构(1)上的机械手臂(2)、设置于机械手臂(2)的执行端(3)上用于抓取波折板的抓取机构(4),所述行走机构(1)包括底框(5)、固设于底框(5)后边上的减速器i(6)和两个减速器ii(7),减速器i(6)的顶部固设有驱动电机(8),驱动电机(8)与减速器i(6)的输入轴连接,位于减速器i(6)左右侧的输出轴上均连接有传动轴(9),两个传动轴(9)分别与两个减速器ii(7)的输入轴连接,位于两个减速器ii(7)前侧的输出轴上均连接有丝杆(10),两个丝杆(10)均旋转安装于底框(5)的前边上;
2.根据权利要求1所述的一种用于波折板铺设的移动机器人,其特征在于:所述底框(5)的前后边之间固设有两个导向杆(14),导向杆(14)设置于丝杆(10)的下方,导向杆(14)贯穿拱形梁(11)设置。
3.根据权利要求1所述的一种用于波折板铺设的移动机器人,其特征在于:所述拱形梁(11)左右端部的内壁上均固设有螺母(15),两个螺母(15)分别螺纹连接于两个丝杆(10)上。
4.根据权利要求1所述的一种用于波折板铺设的移动机器人,其特征在于:所述底框(5)的右边上固设有用于存放波折板的板架(16)。
5.根据权利要求1所述的一种用于波折板铺设的移动机器人,其特征在于:位于前侧的立式舵轮总成的安装板(18)设置于拱形梁(11)拱形端的正下方,立式舵轮总成的舵机(19)和行走电机(34)设置于安装板(18)的上方,立式舵轮总成的主动轮(22)设置于安装板(18)的下方,安装板(18)与拱形梁(11)的拱形端之间铰接有连杆(17),连杆(17)的上端部固设有环形板(23),连杆(17)上套设有弹簧(24),弹簧(24)的一端固设于环形板(23)上,另一端固设于安装板(18)的顶表面上,在弹簧(24)的弹力下,主动轮(22)与地面紧密接触;所述立式舵轮总成上设置有用于驱动从动轮(13)转向的转向机构,转向机构包括转向电缸(20)和转向杆(21),转向杆(21)的两端分别铰接于两个从动轮(13)的转盘(12)上,转向电缸(20)的活塞杆固设于转向杆(21)上。
6.根据权利要求1所述的一种用于波折板铺设的移动机器人,其特征在于:所述抓取机构(4)包括吸盘(25)、电磁铁(26)、固设于机械手臂(2)的执行端(3)底部的环形座(27),环形座(27)的底部固设有吸盘(25),所述吸盘(25)的底表面上且位于其四个角落处均固设有电磁铁(26),位于前侧的两个电磁铁(26)与位于后侧的两个电磁铁(26)之间设置有两个固设于吸盘(25)底表面上的双作用电缸(28),双作用电缸(28)的两个活塞杆的作用端上均固设有橡胶压头(29)。
7.根据权利要求1所述的一种用于波折板铺设的移动机器人,其特征在于:所述底框(5)的顶表面上固设有电池(30),电池(30)与机械手臂(2)、行走电机(34)、舵机(19)和电磁铁(26),该机器人还包括远程控制器,所述远程控制器与舵机(19)、行走电机(34)、驱动电机(8)、机械手臂(2)和转向电缸(20)连接。
技术总结
本技术公开了一种用于波折板铺设的移动机器人,本技术涉及在H型钢上铺设波折板的技术领域,它包括行走机构、设置于行走机构上的机械手臂、设置于机械手臂的执行端上用于抓取波折板的抓取机构,行走机构包括底框、固设于底框后边上的减速器I和两个减速器II,减速器I的顶部固设有驱动电机,驱动电机与减速器I的输入轴连接,两个传动轴分别与两个减速器II的输入轴连接,位于两个减速器II前侧的输出轴上均连接有丝杆,两个丝杆均旋转安装于底框的前边上。本技术的有益效果是:结构紧凑、极大提高波折板铺设效率、减轻工人工作强度、自动化程度高。
技术研发人员:秦东兴,蒋开宇,侯乐川,阎旭,崔鑫平
受保护的技术使用者:四川同人精工科技有限公司
技术研发日:20230309
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!