一种隧道清扫自助加水系统的制作方法
本技术属于煤矿除尘设备领域,具体涉及一种隧道清扫自助加水系统。
背景技术:
1、针对煤矿巷道及管线积尘多、除尘线路长、人工除尘局限性等多方面原因,这就需要一种替代人力除尘的智能机器人设施,对煤矿井下巷道进行全面除尘,一般采用清扫车对煤矿巷道进行喷水清扫除尘但是煤矿巷道一般较长,而清扫车的水箱容量有限,这就需要清扫车多次退出煤矿巷道去加水,这就导致清扫车的清扫效率降低。
技术实现思路
1、鉴于此,本实用新型的目的是提供一种隧道清扫自助加水系统,用于克服上述问题或者至少部分地解决或缓解上述问题。
2、本实用新型提出一种隧道清扫自助加水系统,用于对清扫车上的水箱进行加水,包括:
3、供水管路,所述供水管路沿着煤矿巷道的墙面设置,所述供水管路连接水源;
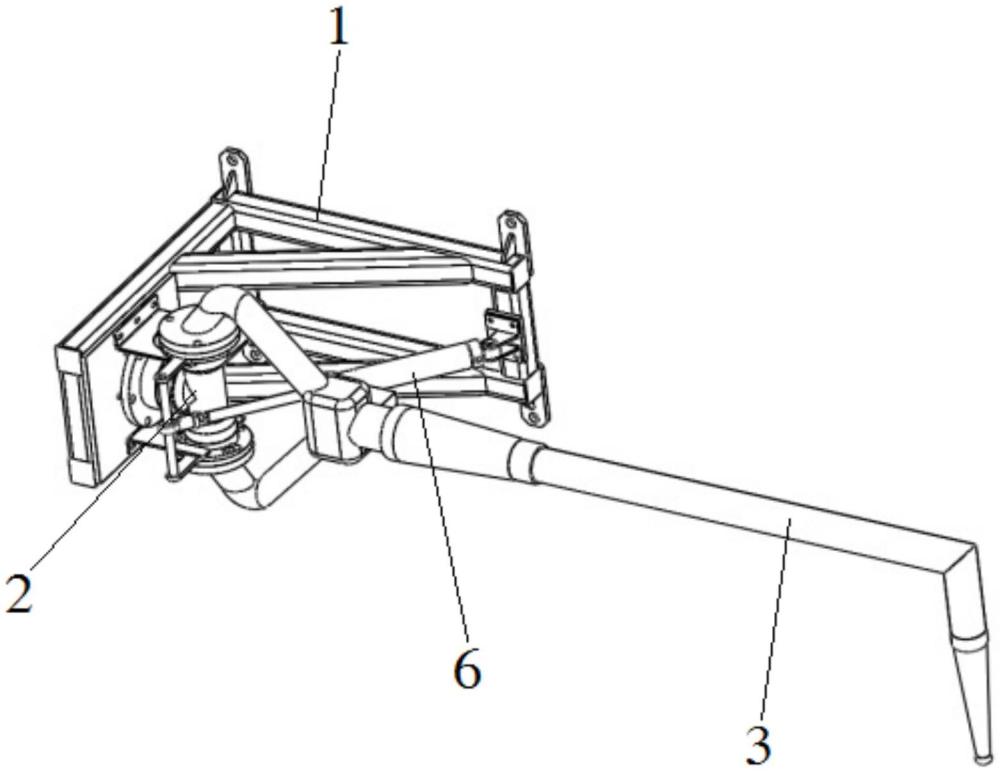
4、固定架,多个所述固定架等距分布在煤矿巷道的墙面上,每个所述固定架上分别设置有水平转动座;
5、加水管头,所述加水管头设置在所述水平转动座上,所述加水管头的一端与所述供水管路之间连接有电动球阀,所述加水管头的出水端竖直向下弯折;
6、气体管路,所述气体挂路沿着煤矿巷道的墙面设置,所述气体管路连接高压气源;
7、气缸,所述气缸连接在所述固定架与所述水平转动座之间,所述气缸与所述气体管路之间连接有气阀。
8、本实用新型还具有以下可选特征。
9、可选地,还包括加水控制器,所述加水控制器的信号接收端连接有多个信号接收器,所述加水控制器的其中两个信号输出端与所述电动球阀和所述气阀信号连接,所述清扫车上设置有加水遥控器,所述加水遥控器与所述信号接收器通讯连接。
10、可选地,所述水箱内设置有最高水位传感器和最低水位传感器。
11、可选地,所述固定架所在处附近的地面上设置有加水停车标识线。
12、可选地,所述水平转动座为t型管结构,具有水平接口、上转动接口和下转动接口,所述加水管头的根部设置有y型分叉,所述y型分叉的两端分别与所述水平转动座的上转动接口和下转动接口相连接。
13、本实用新型的隧道清扫自助加水系统通过在煤矿巷道的墙面上铺设供水管路和供气管路,并在墙面上间隔固定多个固定架,在固定架上设置与供水管路相连接的加水管头,加水管头与固定架之间直接或间接连接气缸,通过控制气缸带动加水管头收起或者展开,当清洗车的水箱没有水时,清洗车可以停在固定架附近的地面上,然后控制气缸展开加水管头,使加水管头的出水口朝下水箱的加水口,再控制电动球阀通水,即可通过加水管头往水箱内加水。本实用新型的隧道清扫自助加水系统及其方法可以解决普通清扫车水箱容量有限的问题,不需要清扫车多次推出煤矿巷道去加水,提高了清扫车的清扫效率。
技术特征:
1.一种隧道清扫自助加水系统,用于对清扫车(8)上的水箱(9)进行加水,其特征在于,包括:
2.根据权利要求1所述的隧道清扫自助加水系统,其特征在于,还包括加水控制器(10),所述加水控制器(10)的信号接收端连接有多个信号接收器(11),所述加水控制器(10)的其中两个信号输出端与所述电动球阀(4)和所述气阀(7)信号连接,所述清扫车(8)上设置有加水遥控器(12),所述加水遥控器(12)与所述信号接收器(11)通讯连接。
3.根据权利要求2所述的隧道清扫自助加水系统,其特征在于,所述水箱(9)内设置有最高水位传感器和最低水位传感器。
4.根据权利要求1所述的隧道清扫自助加水系统,其特征在于,所述固定架(1)所在处附近的地面上设置有加水停车标识线。
5.根据权利要求1所述的隧道清扫自助加水系统,其特征在于,所述水平转动座(2)为t型管结构,具有水平接口、上转动接口和下转动接口,所述加水管头(3)的根部设置有y型分叉,所述y型分叉的两端分别与所述水平转动座(2)的上转动接口和下转动接口相连接。
技术总结
本技术提出一种隧道清扫自助加水系统,用于对清扫车上的水箱进行加水,包括:供水管路、固定架、加水管头、气体管路和气缸;供水管路沿着煤矿巷道的墙面设置,供水管路连接水源;多个固定架等距分布在煤矿巷道的墙面上,每个固定架上分别设置有水平转动座;加水管头设置在水平转动座上,加水管头的一端与供水管路之间连接有电动球阀,加水管头的出水端竖直向下弯折;气体挂路沿着煤矿巷道的墙面设置,气体管路连接高压气源;气缸连接在固定架与水平转动座之间,气缸与气体管路之间连接有气阀。
技术研发人员:杜磊,叶红
受保护的技术使用者:陕西航泰电气股份有限公司
技术研发日:20230814
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!