一种斜坡压实设备及其控制方法与流程
本发明涉及一种斜坡压实设备及其控制方法,属于压实设备。
背景技术:
1、在大坡度(超过25°)压实时,一般的自行式压路机的爬坡能力无法满足要求,由于坡度大,自行式压路机会出现打滑、溜坡等情况,无法在大坡度下压实作业,溜坡出现时,设备处于失控状态,会对驾驶者周围的人员带来安全隐患。
技术实现思路
1、针对上述现有技术存在的问题,本发明提供一种斜坡压实设备及其控制方法,解决大坡度的压实需求及安全需求。
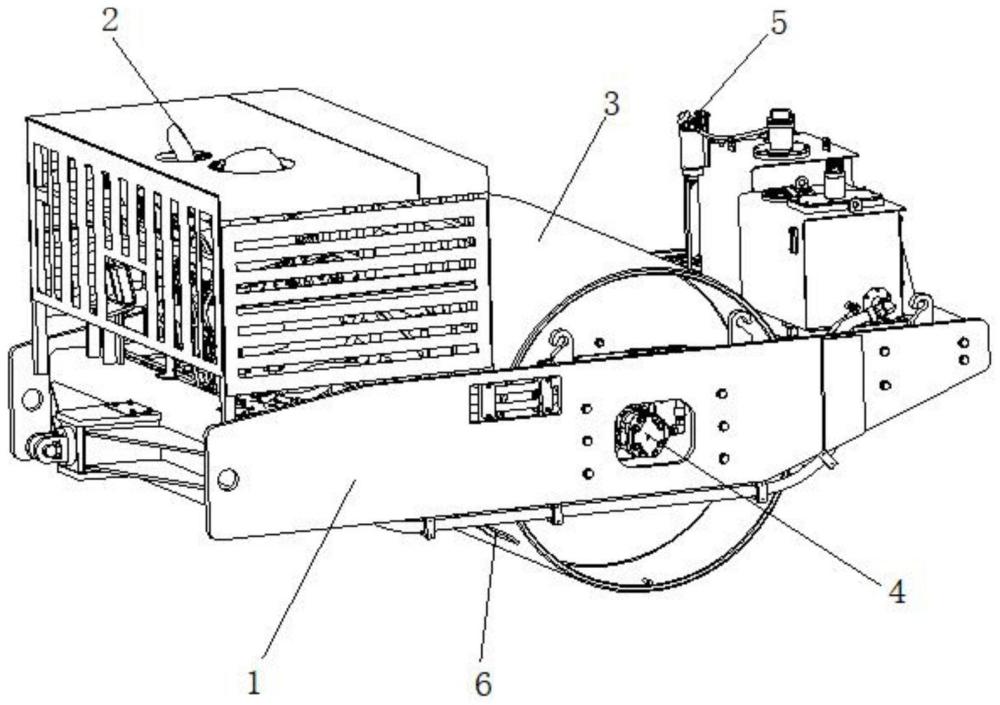
2、为了实现上述目的,本发明采用的一种斜坡压实设备,包括框架、动力系统、振动轮、液压系统、电气系统和刮泥系统;
3、所述框架用于支撑动力系统、振动轮、液压系统、电气系统和刮泥系统,所述动力系统安装在框架的前部,所述振动轮安装在框架的内部,所述液压系统安装在框架上且与振动轮连接,所述电气系统安装在框架的后部,所述刮泥系统安装在框架的下部且与振动轮保持一定距离。
4、作为一种改进,所述框架包括左侧板、右侧板、前配重、后配重和牵引装置;
5、所述前配重通过螺栓安装在左侧板、右侧板的前端,所述后配重通过螺栓安装在两侧板的后端,所述牵引装置焊接在前配重的前侧,所述后配重上安装有燃油箱和液压油箱。
6、作为一种改进,所述燃油箱的出油管焊接在燃油箱的后部,燃油油位安装孔也处于燃油箱的后部。
7、作为一种改进,所述振动轮包括右连接板、制动器、右激振器、左激振器、振动马达、左连接板和振动轮壳;
8、所述右连接板通过螺栓固定在右侧板上,左连接板通过螺栓固定在左侧板上;所述制动器安装在靠近右连接板位置;所述振动马达用于带动左激振器、右激振器旋转产生激振力,所述右连接板、制动器、右激振器、左激振器、振动马达、左连接板均安装在振动轮壳上。
9、作为一种改进,所述液压系统包括振动泵、制动泵和振动比例阀;
10、所述振动泵与动力系统中的发动机通过联轴器连接,所述制动泵集成在振动泵上,所述振动泵通过胶管与振动马达连接,制动泵通过胶管与制动器连接。
11、作为一种改进,所述电气系统包括控制器、速度传感器、无线遥控显示器、声光报警器和倾角传感器;
12、所述控制器分别与速度传感器、发动机、制动泵、振动泵、倾角传感器、声光报警器连接,所述速度传感器用于检测设备的行驶速度,倾角传感器用于检测设备的倾斜角度;
13、所述无线遥控显示器与控制器进行无线通讯,用于控制发动机的启停,调整发动机的转速及振动泵的排量,及制动泵上的电磁阀的通断;当电磁阀接通时,安装在振动轮上的制动器在振动泵输出的压力下解除制动,当电磁阀断开时,制动器的制动被解除。
14、另外,本发明还提供了一种所述的斜坡压实设备的控制方法,包括以下步骤:
15、正常工作时,该斜坡压实设备在牵引装置的牵引下沿斜坡进行作业,操作者通过操作无线遥控显示器,使发动机启动,并选择合适的激振力,此时控制器根据激振力匹配发动机的转速及振动泵的排量来调整振动频率,以实现不同的激振力。
16、作为一种改进,当斜坡的角度超过发动机允许的最大倾斜角度时,控制器检测到倾角传感器采集的角度信号后向无线遥控显示器发出报警信号,无线遥控显示器上弹出对话框并发出警报声提醒操作者尽快关闭发动机,如果操作者超过一定时间没有操作,控制器自动使发动机停机。
17、作为一种改进,当出现牵引的钢丝绳断裂时,控制器通过速度传感器及倾角传感器检测速度及倾斜角度,当速度和倾角中的一个值超过设定值时,控制器控制发动机立刻停止,同时控制声光报警器发出声光报警,提醒设备周围的人员、设备紧急避让。
18、与现有技术相比,本发明的斜坡压实设备,解决了传统自行式压路机因坡度大出现打滑、溜坡等情况导致无法压实作业,及溜坡导致设备失控带来安全隐患的问题,有效满足大坡度的压实需求及安全需求。
技术特征:
1.一种斜坡压实设备,其特征在于,包括框架(1)、动力系统(2)、振动轮(3)、液压系统(4)、电气系统(5)和刮泥系统(6);
2.根据权利要求1所述的一种斜坡压实设备,其特征在于,所述框架(1)包括左侧板(1-5)、右侧板(1-1)、前配重(1-7)、后配重(1-2)和牵引装置(1-8);
3.根据权利要求2所述的一种斜坡压实设备,其特征在于,所述燃油箱(1-3)的出油管焊接在燃油箱(1-3)的后部,燃油油位安装孔也处于燃油箱(1-3)的后部。
4.根据权利要求1所述的一种斜坡压实设备,其特征在于,所述振动轮(3)包括右连接板(3-1)、制动器(3-2)、右激振器(3-3)、左激振器(3-4)、振动马达(3-5)、左连接板(3-6)和振动轮壳(3-7);
5.根据权利要求1所述的一种斜坡压实设备,其特征在于,所述液压系统(4)包括振动泵(4-1)、制动泵(4-2)和振动比例阀(4-3);
6.根据权利要求1所述的一种斜坡压实设备,其特征在于,所述电气系统(5)包括控制器(5-1)、速度传感器(5-2)、无线遥控显示器(5-3)、声光报警器(5-4)和倾角传感器(5-5);
7.一种权利要求1-6任一项所述的斜坡压实设备的控制方法,其特征在于,包括以下步骤:正常工作时,该斜坡压实设备在牵引装置(1-8)的牵引下沿斜坡进行作业,操作者通过操作无线遥控显示器(5-3),使发动机(7)启动,并选择合适的激振力,此时控制器(5-1)根据激振力匹配发动机(7)的转速及振动泵(4-1)的排量来调整振动频率,以实现不同的激振力。
8.根据权利要求7所述的一种斜坡压实设备的控制方法,其特征在于,当斜坡的角度超过发动机(7)允许的最大倾斜角度时,控制器(5-1)检测到倾角传感器(5-5)采集的角度信号后向无线遥控显示器(5-3)发出报警信号,无线遥控显示器(5-3)上弹出对话框并发出警报声提醒操作者尽快关闭发动机,如果操作者超过一定时间没有操作,控制器(5-1)自动使发动机停机。
9.根据权利要求7所述的一种斜坡压实设备的控制方法,其特征在于,当出现牵引的钢丝绳断裂时,控制器(5-1)通过速度传感器(5-2)及倾角传感器(5-5)检测速度及倾斜角度,当速度和倾角中的一个值超过设定值时,控制器(5-1)控制发动机(7)立刻停止,同时控制声光报警器(5-4)发出声光报警,提醒设备周围的人员、设备紧急避让。
技术总结
本发明公开一种斜坡压实设备及其控制方法,包括框架、动力系统、振动轮、液压系统、电气系统和刮泥系统;所述框架用于支撑动力系统、振动轮、液压系统、电气系统和刮泥系统,所述动力系统安装在框架的前部,所述振动轮安装在框架的内部,所述液压系统安装在框架上且与振动轮连接,所述电气系统安装在框架的后部,所述刮泥系统安装在框架的下部且与振动轮保持一定距离。本发明的斜坡压实设备,解决了传统自行式压路机因坡度大出现打滑、溜坡等情况导致无法压实作业,及溜坡导致设备失控带来安全隐患的问题,有效满足大坡度的压实需求及安全需求。
技术研发人员:孟绪,吴闯,郝鹿坤,亢涛,吴硕,张俊娴
受保护的技术使用者:徐工集团工程机械股份有限公司道路机械分公司
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!