一种基于MCU与FPGA的步进电机报警控制方法与流程
本发明涉及医疗器械,尤其涉及一种基于mcu与fpga的步进电机报警控制方法。
背景技术:
1、目前,在医疗器械检测领域,随着检测速度大幅度提升,要求运动机构在多维度运动中又快又精确,所以大部分的运动部件都会增加行程开关,作为运动的终点判断。
2、但是,行程开关的信号受到线缆、行程开关损坏等外部干扰而误触发,导致系统认为运动机构运动到终点,从而进行下一步运动,导致运动机构撞机损坏设备。
技术实现思路
1、本发明的目的在于提供一种基于mcu与fpga的步进电机报警控制方法,解决了现有的医疗器械检测设备的行程开关的信号受到等外部干扰而误触发,导致运动机构撞机损坏设备的问题。
2、为实现上述目的,本发明提供了一种基于mcu与fpga的步进电机报警控制方法,包括以下步骤:
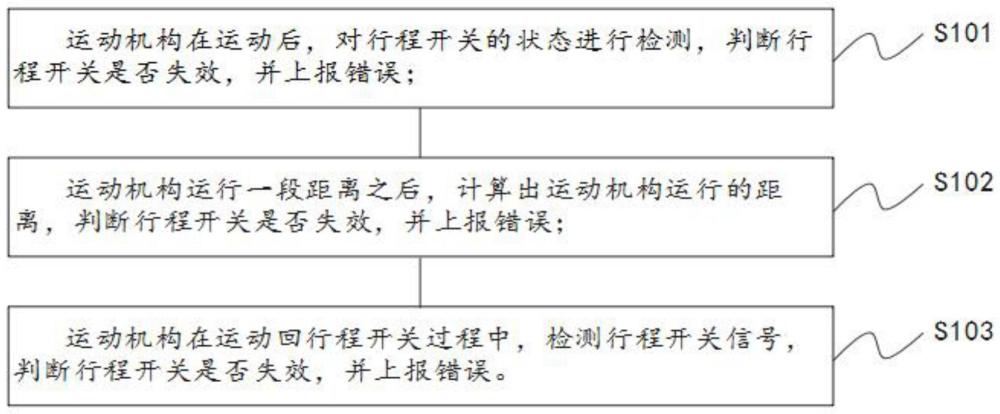
3、运动机构在运动后,对行程开关的状态进行检测,判断行程开关是否失效,并上报错误;
4、运动机构运行一段距离之后,计算出运动机构运行的距离,判断行程开关是否失效,并上报错误;
5、运动机构在运动回行程开关过程中,检测行程开关信号,判断行程开关是否失效,并上报错误。
6、其中,运动机构在运动后,对行程开关的状态进行检测,判断行程开关是否失效,并上报错误,所述步骤还包括:
7、运动机构离开行程开关时,判断行程开关信号状态变化,若是行程开关信号状态无变化,再一次检测行程开关信号状态,还是行程开关信号状态无变化,判断行程开关失效,设备停止运行,上报错误。
8、其中,运动机构运行一段距离之后,计算出运动机构运行的距离,判断行程开关是否失效,并上报错误,所述步骤还包括:
9、运动机构运行一段距离之后,先计算出运动机构运行的距离,当运动机构再次运动回行程开关过程中,遇到行程开关信号状态变化后,停止运动,此时再一次判断行程开关信号状态,若行程开关信号与运动机构停止时的状态不一样时,认为行程开关信号状态误触发,运动机构则继续运动到行程开关信号变化停止。
10、其中,运动机构运行一段距离之后,计算出运动机构运行的距离,判断行程开关是否失效,并上报错误,所述步骤还包括:
11、若行程开关信号状态与停止时一样,则计算出运动机构运动的距离,判断回来的距离和出去的距离之间的差值,若出去的距离大于回来的距离,则判断行程开关失效,设备停止运行,上报错误。
12、其中,运动机构在运动回行程开关过程中,检测行程开关信号,判断行程开关是否失效,并上报错误,所述步骤还包括:
13、运动机构在运动回行程开关过程中,行程开关信号无变化,则判断行程开关失效,设备停止运行,上报错误。
14、本发明的一种基于mcu与fpga的步进电机报警控制方法,运动机构在运动后,对行程开关的状态进行检测,判断行程开关是否失效,并上报错误;运动机构运行一段距离之后,计算出运动机构运行的距离,以此判断行程开关是否失效,并上报错误;运动机构在运动回行程开关过程中,检测行程开关信号,判断行程开关是否失效,并上报错误。不增加任何传感器去检测电机故障,运动可靠性更强,当光耦失效时,能被检测出来,防止撞机损坏设备,检测出运动机构运动异常,保护设备。
技术特征:
1.一种基于mcu与fpga的步进电机报警控制方法,其特征在于,包括以下步骤:
2.如权利要求1所述的基于mcu与fpga的步进电机报警控制方法,其特征在于,运动机构在运动后,对行程开关的状态进行检测,判断行程开关是否失效,并上报错误,所述步骤还包括:
3.如权利要求1所述的基于mcu与fpga的步进电机报警控制方法,其特征在于,运动机构运行一段距离之后,计算出运动机构运行的距离,判断行程开关是否失效,并上报错误,所述步骤还包括:
4.如权利要求3所述的基于mcu与fpga的步进电机报警控制方法,其特征在于,运动机构运行一段距离之后,计算出运动机构运行的距离,判断行程开关是否失效,并上报错误,所述步骤还包括:
5.如权利要求1所述的基于mcu与fpga的步进电机报警控制方法,其特征在于,运动机构在运动回行程开关过程中,检测行程开关信号,判断行程开关是否失效,并上报错误,所述步骤还包括:
技术总结
本发明涉及医疗器械技术领域,具体涉及一种基于MCU与FPGA的步进电机报警控制方法,运动机构在运动后,对行程开关的状态进行检测,判断行程开关是否失效,并上报错误;运动机构运行一段距离之后,计算出运动机构运行的距离,以此判断行程开关是否失效,并上报错误;运动机构在运动回行程开关过程中,检测行程开关信号,判断行程开关是否失效,并上报错误。不增加任何传感器去检测电机故障,运动可靠性更强,当光耦失效时,能被检测出来,防止撞机损坏设备,检测出运动机构运动异常,保护设备。
技术研发人员:杨举,杨雨清,欧欣蔚
受保护的技术使用者:桂林优利特医疗电子有限公司
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!