一种机械手双夹爪取料装置的制作方法
1.本实用新型属于机械设计技术领域,具体涉及一种机械手双夹爪取料装置。
背景技术:
2.dq381矫正汽车换挡拨叉工序中,dq381产线的换挡拨叉包含4个型号的拨叉,因四个型号尺寸和结构各不相同,对应四台矫正机,需操作员手持换挡拨叉放入矫正机中进行尺寸矫正,人工成本高,单工序作业时间长,同时还不能满足客户对产量的要求。
技术实现要素:
3.基于上述技术问题,本实用新型提出一种机械手双夹爪取料装置,此装置安装在机械手臂上,一套装置能抓取两个型号的换挡拨叉,达到缩短本工序作业时间,提升产量,提高经济效益得目的。
4.本实用新型采用如下技术方案:
5.一种机械手双夹爪取料装置,包括气缸形成传感器a、气缸形成传感器b、气缸、限位块a、限位块b、 夹抓a、夹抓b、距离探测传感器c、限位块c、支撑架,所述气缸与夹抓a、夹抓b相连,所述气缸、传感器a、传感器b、传感器c均固定在支撑架上并与plc相连,所述气缸两侧分别设有气缸形成传感器a、气缸形成传感器b,所述限位块a、限位块b、限位块c均固定在支撑架上,所述夹抓a、夹抓b分别夹取换挡拨叉a、换挡拨叉b,所述限位块a、限位块b抵住换挡拨叉a的连接板和极片连接,所述限位块c抵住换挡拨叉b的连接板,所述距离探测传感器c设置于夹爪之间的一侧。
6.进一步地,所述气缸形成传感器a、气缸形成传感器b分别位于夹抓a、夹抓b上方。
7.本实用新型的有益效果是:两对夹紧装置安装在同一个机械手末端,实现一个机械手臂能抓取两种型号的换挡拨叉,并能对应型号和设备,将换挡拨叉放入矫正机中。缩短取放换挡拨叉在校正工序中所占的时间,进而降低校正工序时间,提高产量。
附图说明
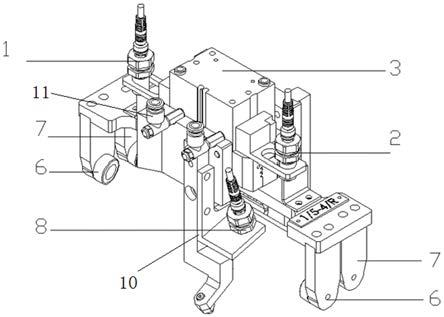
8.图1所示为双夹抓取料装置;
9.图2所示为a型夹抓夹取a型号拨叉的侧视图;
10.图3所示为b型夹抓夹取b型号拨叉的侧视图。
11.图中部件:1为气缸形成传感器a、2为气缸形成传感器b、3为气缸、4为限位块a、5为限位块b、 6为夹抓a、7为夹抓b、8为距离探测传感器c、9为限位块c、10为支撑架、11为气缸的气管连接阀、12为换挡拨叉a、13为换挡拨叉b。
具体实施方式
12.下面结合附图及实施例对本实用新型做进一步解释。
13.双加爪取件装置的机构包括气缸形成传感器a 1、气缸形成传感器b 2、气缸3、限
位块a 4、限位块b 5、 夹抓a6、夹抓b7、距离探测传感器c 8、限位块c 9、支撑架10共同组成。
14.气缸形成传感器a1和气缸形成传感器b2是ah0013型号的气缸行程传感器,安装在气缸3的两侧,用以判断连接气缸的夹抓a和夹抓b是夹紧或松开状态。
15.气缸3的两侧安装的是两套夹爪,夹抓a 6、夹抓b 7。两套夹抓的作用是夹取换挡拨叉a 12和换挡拨叉b 13,因不同型号的换挡拨叉横杆的长度不同,所以一套装置上是两对夹抓。
16.限位块 a 4,限位块b 5是对换挡拨叉a和b的进行限位,防止换挡拨叉因自身重力的不均匀导致旋转,这样,机械手将换挡拨叉放进矫正机中的位置不精确。
17.距离探测传感器c 8型号是pr12
‑
4dn,功能是夹抓完成夹紧操作后,探测到换挡拨叉的距离,从而判断产品是否成功被夹起。
18.双夹爪取件装置是安装在机械臂末端的夹件装置,a型号拨叉和b型号拨叉交替排列在机械手下方,plc 控制机械手夹抓a夹取a型号拨叉,夹抓b夹取b型号拨叉,机械手移动到待取件上方5cm处,检测到换挡拨叉后,气缸3联动夹抓a 6和夹抓b 7,双侧打开,向下方移动5cm, 气缸3联动夹抓a 6和夹抓b 7,双侧回收,夹取换挡拨叉。机械手移动到矫正机治具的上方5cm处,气缸3联动夹抓a 6和夹抓b 7,双侧打开,换挡拨叉落入矫正机治具中。随后机械手回归原位,继续取下一个型号的换挡拨叉。限位块 a 4,限位块a 5限位块b 9,对换挡拨叉进行限位,防止旋转,保证换挡拨叉以指定的方式被放入矫正机。距离探测传感器c 8型号是pr12
‑
4dn,功能是夹抓完成夹紧操作后,探测到换挡拨叉的距离,从而判断产品是否成功被夹起,若夹取成功,机械手移动,若未夹取成功,距离探测传感器c 8将信号回传计算机终端,终端将信号传递给报警灯,设备报警,维修人员会进行维修。
技术特征:
1. 一种机械手双夹爪取料装置,其特征在于:包括气缸形成传感器a(1)、气缸形成传感器b(2)、气缸(3)、限位块a(4)、限位块b(5)、 夹抓a(6)、夹抓b(7)、距离探测传感器c(8)、限位块c(9)、支撑架(10),所述气缸(3)与夹抓a(6)、夹抓b(7)相连,所述气缸(3)、传感器a(1)、传感器b(2)、传感器c(8)均固定在支撑架(10)上并与plc相连,所述气缸(3)两侧分别设有气缸形成传感器a(1)、气缸形成传感器b(2),所述限位块a(4)、限位块b(5)、限位块c(9)均固定在支撑架(10)上,所述夹抓a(6)、夹抓b(7)分别夹取换挡拨叉a(12)、换挡拨叉b(13),所述限位块a(4)、限位块b(5)抵住换挡拨叉a(12)的连接板和极片连接,所述限位块c(9)抵住换挡拨叉b(13)的连接板,所述距离探测传感器c(8)设置于夹爪之间的一侧。2.根据权利要求1所述的一种机械手双夹爪取料装置,其特征在于:所述气缸形成传感器a(1)、气缸形成传感器b(2)分别位于夹抓a(6)、夹抓b(7)上方。
技术总结
一种机械手双夹爪取料装置,属于机械设计技术领域,包括气缸形成传感器A、气缸形成传感器B、气缸、限位块A、限位块B、夹抓A、夹抓B、距离探测传感器C、限位块C、支撑架,所述气缸与夹抓A、夹抓B相连,所述气缸两侧分别设有气缸形成传感器A、气缸形成传感器B,所述夹抓A、夹抓B分别夹取换挡拨叉A、换挡拨叉B,所述限位块A、限位块B抵住换挡拨叉A的连接板和极片连接,所述限位块C抵住换挡拨叉B的连接板,所述距离探测传感器C设置于夹爪之间的一侧。此装置安装在机械手臂上,一套装置能抓取两个型号的换挡拨叉,达到缩短本工序作业时间,提升产量,提高经济效益得目的。济效益得目的。济效益得目的。
技术研发人员:高景春 李岢卫 李有为 董传波 张东岳 尹建志
受保护的技术使用者:速亚动力总成零部件(大连)有限公司
技术研发日:2020.12.14
技术公布日:2021/9/21
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1