机器人处理方法及系统与流程
本说明书实施例涉及机器人,特别涉及一种机器人处理方法。
背景技术:
1、当今在idc(互联网数据中心,internet data center)基础设施建设完成的基础上,开始进行项目系统的建设工作,并进行项目系统交付后的运维管理工作,随着部署项目系统越来越多,种类越来越杂,运维的工作量越来越大,难度也越来越大,项目系统出现问题,导致对idc部署方的运营风险也越来越高。
2、随着idc基础设施的老化,设备会进入频繁故障期,在存在核心项目系统的网络设备以及服务器主机,考虑到软件系统的迁移难度和数据的完整性,短时间内不能将其迁移到新的环境中去,只能由运维人员在设备出现故障时进行维修和更换等,例如,当idc基础设施中的硬盘出现故障时,只能人工进入机房进行故障硬盘的排查、硬盘的更换,当故障硬盘处于较高处的情况下,还需要采用登高设备进行辅助,需要耗费大量的人力成本和资金成本。
技术实现思路
1、有鉴于此,本说明书施例提供了一种机器人处理方法。本说明书一个或者多个实施例同时涉及一种机器人处理系统,一种计算设备,一种计算机可读存储介质,以解决现有技术中存在的技术缺陷。
2、根据本说明书实施例的第一方面,提供了一种机器人处理方法,所述方法应用于机器人处理系统,所述系统包括巡检机器人、机器人控制模块、目标服务器、硬盘柜以及硬盘回收箱;
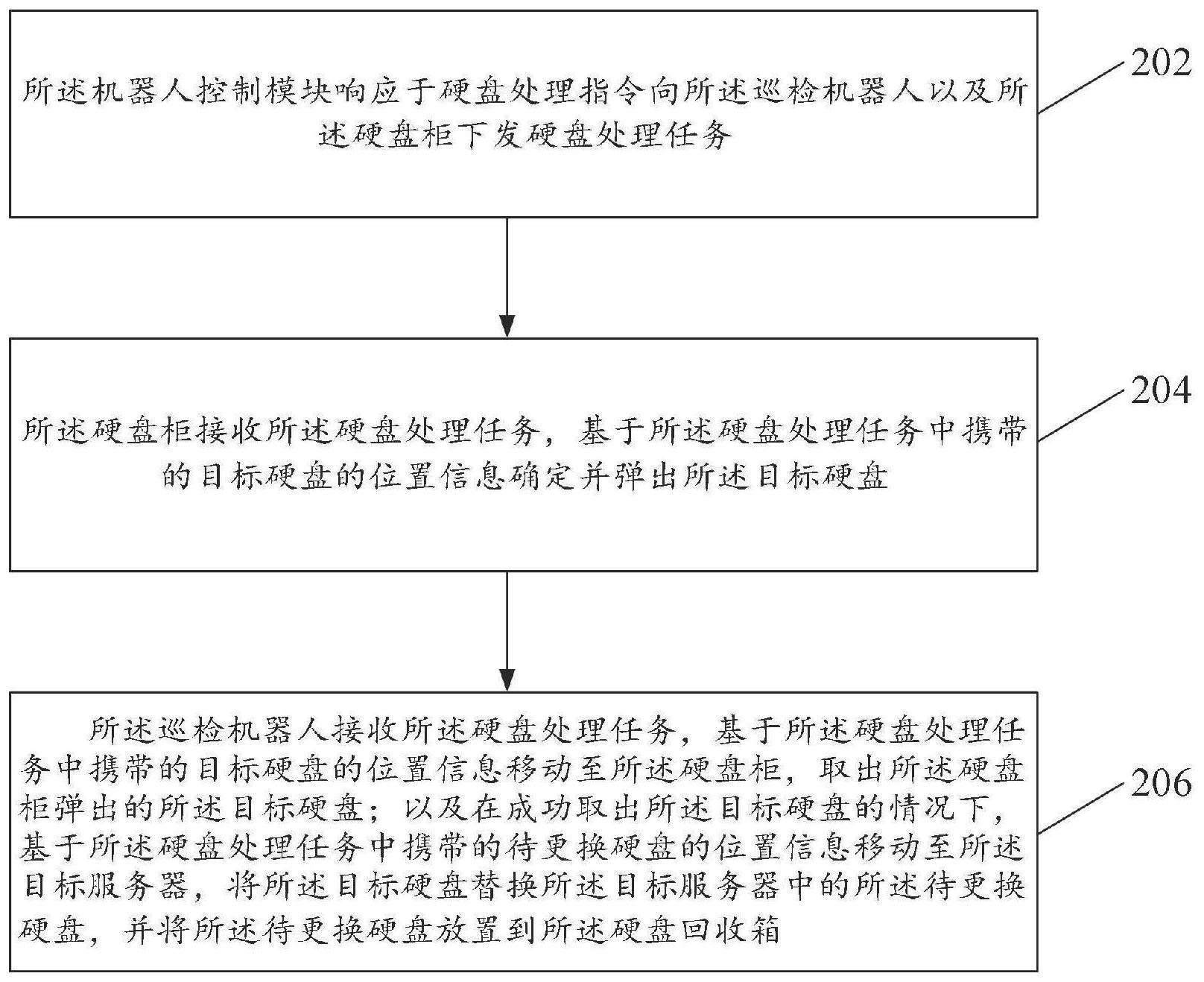
3、所述机器人控制模块响应于硬盘处理指令向所述巡检机器人以及所述硬盘柜下发硬盘处理任务;
4、所述硬盘柜接收所述硬盘处理任务,基于所述硬盘处理任务中携带的目标硬盘的位置信息确定并弹出所述目标硬盘;
5、所述巡检机器人接收所述硬盘处理任务,基于所述硬盘处理任务中携带的目标硬盘的位置信息移动至所述硬盘柜,取出所述硬盘柜弹出的所述目标硬盘;以及
6、在成功取出所述目标硬盘的情况下,基于所述硬盘处理任务中携带的待更换硬盘的位置信息移动至所述目标服务器,将所述目标硬盘替换所述目标服务器中的所述待更换硬盘,并将所述待更换硬盘放置到所述硬盘回收箱。
7、根据本说明书实施例的第二方面,提供了一种机器人处理系统,所述系统包括巡检机器人、机器人控制模块、目标服务器、硬盘柜以及硬盘回收箱;
8、所述机器人控制模块,用于响应于硬盘处理指令向所述巡检机器人以及所述硬盘柜下发硬盘处理任务;
9、所述硬盘柜,用于接收所述硬盘处理任务,基于所述硬盘处理任务中携带的目标硬盘的位置信息确定并弹出所述目标硬盘;
10、所述巡检机器人,用于接收所述硬盘处理任务,基于所述硬盘处理任务中携带的目标硬盘的位置信息移动至所述硬盘柜,取出所述硬盘柜弹出的所述目标硬盘;以及
11、在成功取出所述目标硬盘的情况下,基于所述硬盘处理任务中携带的待更换硬盘的位置信息移动至所述目标服务器,将所述目标硬盘替换所述目标服务器中的所述待更换硬盘,并将所述待更换硬盘放置到所述硬盘回收箱。
12、根据本说明书实施例的第三方面,提供了一种计算设备,包括:
13、存储器和处理器;
14、所述存储器用于存储计算机可执行指令,所述处理器用于执行所述计算机可执行指令,该计算机可执行指令被处理器执行时实现上述机器人处理方法的步骤。
15、根据本说明书实施例的第四方面,提供了一种计算机可读存储介质,其存储有计算机可执行指令,该计算机可执行指令被处理器执行时实现上述机器人处理方法的步骤。
16、本说明书一个实施例实现了一种机器人处理方法及系统,其中,所述机器人处理方法应用于机器人处理系统,所述系统包括巡检机器人、机器人控制模块、目标服务器、硬盘柜以及硬盘回收箱;所述机器人控制模块响应于硬盘处理指令向所述巡检机器人以及所述硬盘柜下发硬盘处理任务,其中,所述硬盘处理任务包括硬盘置换任务;所述硬盘柜接收所述硬盘处理任务,基于所述硬盘处理任务中携带的目标硬盘的位置信息确定并弹出所述目标硬盘;所述巡检机器人接收所述硬盘处理任务,基于所述硬盘处理任务中携带的目标硬盘的位置信息移动至所述硬盘柜,取出所述硬盘柜弹出的所述目标硬盘;以及在成功取出所述目标硬盘的情况下,基于所述硬盘处理任务中携带的待更换硬盘的位置信息移动至所述目标服务器,将所述目标硬盘替换所述目标服务器中的所述待更换硬盘,并将所述待更换硬盘放置到所述硬盘回收箱。
17、具体的,所述机器人处理方法通过机器人控制模块、巡检机器人、硬盘柜以及硬盘回收箱之间的交互,使得机器人具备自动取新硬盘、更换故障硬盘以及回收故障硬盘等一系列的操作,在整个硬盘更换期间无需人工参与,节省人力成本和资金成本。
技术特征:
1.一种机器人处理方法,所述方法应用于机器人处理系统,所述系统包括巡检机器人、机器人控制模块、目标服务器、硬盘柜以及硬盘回收箱;
2.根据权利要求1所述的机器人处理方法,所述机器人控制模块响应于硬盘处理指令向所述巡检机器人以及所述硬盘柜下发硬盘处理任务之前,还包括:
3.根据权利要求1所述的机器人处理方法,所述巡检机器人包括机器人本体、以及安装在所述机器人本体的控制部件、硬盘夹持部件以及硬盘承载部件;
4.根据权利要求3所述的机器人处理方法,所述巡检机器人还包括第一拍摄装置,所述第一拍摄装置设置在所述硬盘夹持部件上;
5.根据权利要求3所述的机器人处理方法,所述将所述目标硬盘替换所述目标服务器中的所述待更换硬盘,并将所述待更换硬盘放置到所述硬盘回收箱,包括:
6.根据权利要求4所述的机器人处理方法,所述巡检机器人还包括射频识别扫描器,所述射频识别扫描器设置在所述硬盘夹持部件上;
7.根据权利要求4所述的机器人处理方法,所述巡检机器人还包括可移动机身和第二拍摄装置,所述硬件夹持部件、所述硬盘承载部件以及所述第二拍摄装置均设置在所述可移动机身上;
8.根据权利要求6所述的机器人处理方法,所述巡检机器人还包括可移动机身和第二拍摄装置,所述硬件夹持部件、所述硬盘承载部件以及所述第二拍摄装置均设置在所述可移动机身上;
9.根据权利要求1所述的机器人处理方法,所述将所述待更换硬盘放置到所述硬盘回收箱,包括:
10.根据权利要求9所述的机器人处理方法,所述将所述待更换硬盘放置到所述硬盘回收箱之后,还包括:
11.一种机器人处理系统,所述系统包括巡检机器人、机器人控制模块、目标服务器、硬盘柜以及硬盘回收箱;
12.一种计算设备,包括:
13.一种计算机可读存储介质,其存储有计算机可执行指令,该计算机可执行指令被处理器执行时实现权利要求1至10任意一项所述机器人处理方法的步骤。
技术总结
本说明书实施例提供机器人处理方法及系统,其中,所述机器人处理方法中机器人控制模块响应于硬盘处理指令向所述巡检机器人以及所述硬盘柜下发硬盘处理任务;所述硬盘柜接收所述硬盘处理任务,基于所述硬盘处理任务中携带的目标硬盘的位置信息确定并弹出所述目标硬盘;所述巡检机器人接收所述硬盘处理任务,基于所述硬盘处理任务中携带的目标硬盘的位置信息移动至所述硬盘柜,取出所述硬盘柜弹出的所述目标硬盘;以及在成功取出所述目标硬盘的情况下,基于所述硬盘处理任务中携带的待更换硬盘的位置信息移动至所述目标服务器,将所述目标硬盘替换所述目标服务器中的所述待更换硬盘,并将所述待更换硬盘放置到所述硬盘回收箱。
技术研发人员:吕万洲,刘自源,王鑫,吴国藩,刘怡舟,杨泽国,胡思奇,施家栋,谭平
受保护的技术使用者:阿里云计算有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!