乐器演奏机器人的控制方法和乐器演奏机器人与流程
本申请涉及机器人,具体涉及一种乐器演奏机器人的控制方法和乐器演奏机器人。
背景技术:
1、随着科技的发展,尤其是近十年以来机器人的应用领域在不断拓宽,已经从工业制造领域走向如医疗救治、智能家居、智慧出行、文创娱乐等社会生活的各个领域中。演艺机器人方面有西洋乐器演奏机器人乐队、国风民乐机器人乐队、表演机器人。
2、现有的演奏机器人在进行演奏时,通常基于数字音乐文件进行演奏,例如,对midi格式的音乐文件进行解析,进而得到电子琴、架子鼓、吉他和贝斯等乐器的音轨动作序列;根据所述音轨动作序列分别生成乐队中各机器人的驱动数据文件;乐队中各机器人根据所述驱动数据文件演奏音乐。然而,现有的演奏机器人在进行演奏时,演奏效果往往难以演奏出输入的音乐文件的演奏效果。
3、因此,如何提升演奏机器人的演奏效果成为亟待解决的技术问题。
技术实现思路
1、本申请提供了一种乐器演奏机器人的控制方法和乐器演奏机器人,以至少解决相关技术中所存在的技术问题。
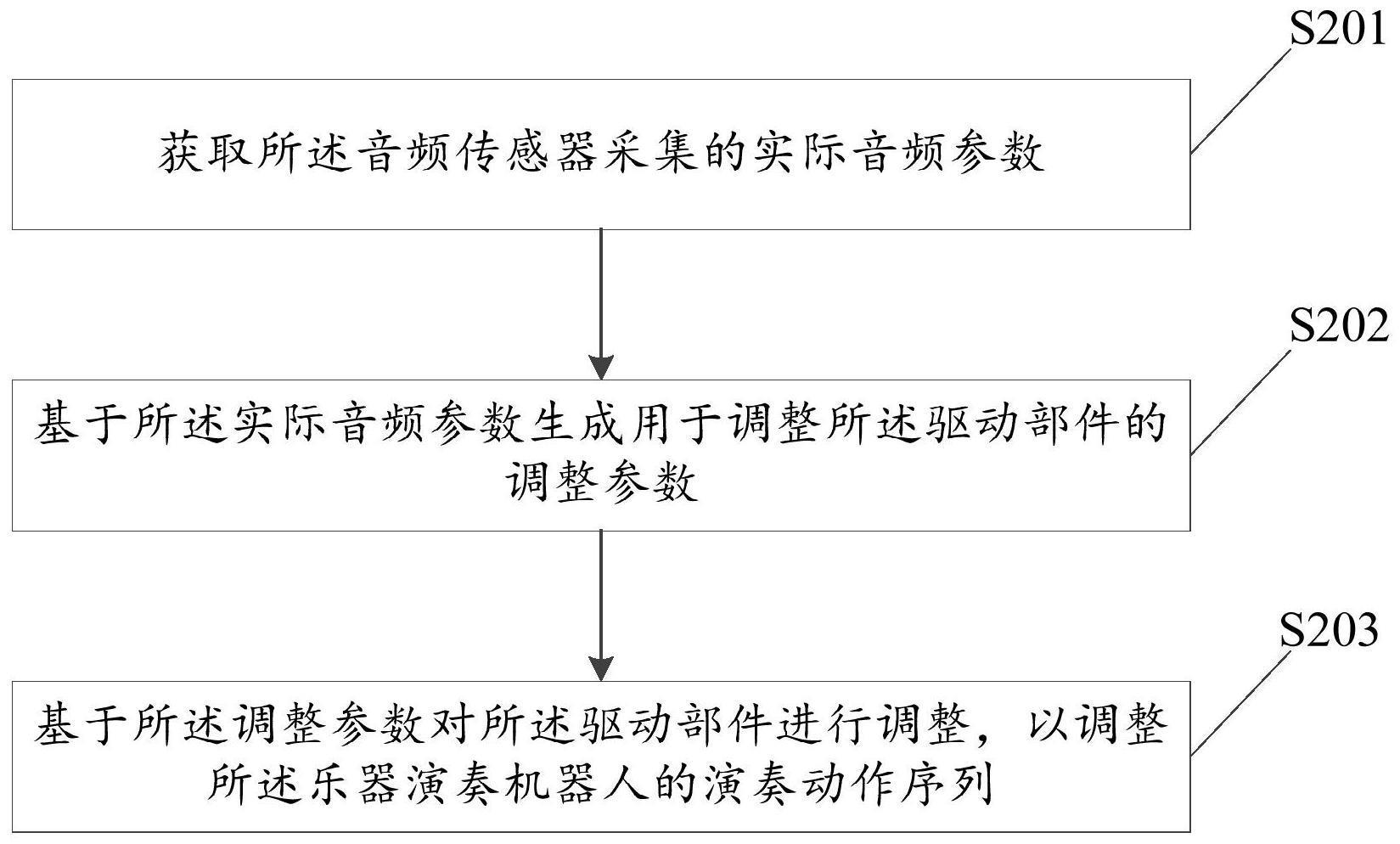
2、本申请还提供了一种乐器演奏机器人的控制方法,所述乐器演奏机器人包括:本体、至少一个演奏部件、用于驱动演奏部件的驱动部件,在乐器发声处还设置有音频传感器,所述控制方法包括:获取所述音频传感器采集的实际音频参数,所述实际音频参数为所述乐器演奏机器人基于音乐文件演奏的音乐的音高参数、频率参数和节拍参数中的至少之一;基于所述实际音频参数生成用于调整所述驱动部件的调整参数;基于所述调整参数对所述驱动部件进行调整,以调整所述乐器演奏机器人的演奏动作序列。
3、可选地,所述基于所述音频参数生成用于调整所述驱动部件的调整参数包括:将所述实际音频参数与基于所述音乐文件解析得到音频参数进行比对,得到所述驱动部件的延迟数据;基于所述延迟数据确定所述驱动部件调整参数。
4、可选地,在获取所述音频传感器采集的实际音频参数之前包括:获取待演奏的音乐文件;对所述音乐文件进行解析,得到待演奏的音乐的音频参数;基于所述音频参数生成所述驱动部件的驱动参数;基于所述驱动参数控制所述驱动部件驱动所述演奏部件执行演奏。
5、可选地,所述演奏部件还设置有力矩传感器,用于采集所述演奏部件在演奏时实际演奏力度,所述控制方法还包括:获取所述实际演奏力度;将所述实际演奏力度与预设演奏力度进行对比,得到演奏力度调整参数;基于所述演奏力度调整参数调整所述驱动部件演奏力度驱动参数。
6、根据第二方面,本申请实施例提供了一种乐器演奏机器人,包括:本体、至少一个演奏部件、用于驱动演奏部件的驱动部件,在乐器发声处还设置有音频传感器;控制器,分别与驱动部件和所述音频传感器接,用于执行上述第一方面任意一项所述乐器演奏机器人的控制方法。
7、可选地,所述乐器安装在乐器安装座上,在所述安装座上固定安装有传感器支架,所述传感器支架的一端与所述安装座固定连接,另一端安装所述音频传感器并距离所述乐器发声处预设距离。
8、可选地,所述演奏部件为分段式结构,在每段之间旋合有拉伸弹簧。
9、可选地,所述演奏部件包括固定端和自由端,在所述演奏部件的固定端连接有力矩传感器。
10、可选地,在所述本体还安装有至少一个机械臂,在机械臂的末端安装有所述演奏部件;其中,所述机械臂上安装有至少一个所述驱动部件作为活动关节,所述活动关节与所述力矩传感器的固定端连接,所述力矩传感器的检测端与所述演奏部件的固定端。
11、可选地,所述活动关节包括肩关节、肘关节和腕关节中的至少之一,其中,所述肩关节包括相互配合的伺服电机和行星减速器;所述肘关节包括直接驱动电机;所述腕关节包括一体式伺服电机。。
12、本申请的乐器演奏机器人的控制方法,在乐器发声处还设置有音频传感器,获取所述音频传感器采集的实际音频参数,所述实际音频参数为所述乐器演奏机器人基于音乐文件演奏的音乐的音高参数、频率参数和节拍参数中的至少之一;基于所述实际音频参数生成用于调整所述驱动部件的调整参数;基于所述调整参数对所述驱动部件进行调整,以调整所述乐器演奏机器人的演奏动作序列。获取到实际音频参数后,基于实际音频参数实际的延时状态对驱动部件的驱动参数进行重新调整,以减少实际演奏的音频与音乐播放器中播放的音乐存在延时现象,提升演奏效果。
13、本申请的乐器演奏机器人,包括本体、至少一个演奏部件、用于驱动演奏部件的驱动部件,在乐器发声处还设置有音频传感器。通过在乐器发声处设置音频传感器实时采集演奏机器人演奏的实际音频参数上传至控制器,控制器获取到实际音频参数后,基于实际音频参数实际的延时状态对驱动部件的驱动参数进行重新调整,以减少实际演奏的音频与音乐播放器中播放的音乐存在延时现象,提升演奏效果。
技术特征:
1.一种乐器演奏机器人的控制方法,其特征在于,所述乐器演奏机器人包括:本体、至少一个演奏部件、用于驱动演奏部件的驱动部件,在乐器发声处还设置有音频传感器,所述控制方法包括:
2.如权利要求1所述的乐器演奏机器人的控制方法,其特征在于,所述基于所述音频参数生成用于调整所述驱动部件的调整参数包括:
3.如权利要求1所述的乐器演奏机器人的控制方法,其特征在于,在获取所述音频传感器采集的实际音频参数之前包括:
4.如权利要求1所述的乐器演奏机器人的控制方法,其特征在于,所述演奏部件还设置有力矩传感器,用于采集所述演奏部件在演奏时实际演奏力度,所述控制方法还包括:
5.一种乐器演奏机器人,其特征在于,包括:本体、至少一个演奏部件、用于驱动演奏部件的驱动部件,在乐器发声处还设置有音频传感器;
6.如权利要求5所述的乐器演奏机器人,其特征在于,所述乐器安装在乐器安装座上,在所述安装座上固定安装有传感器支架,所述传感器支架的一端与所述安装座固定连接,另一端安装所述音频传感器并距离所述乐器发声处预设距离。
7.如权利要求5所述的乐器演奏机器人,其特征在于,所述演奏部件为分段式结构,在每段之间旋合有拉伸弹簧。
8.如权利要求5所述的乐器演奏机器人,其特征在于,所述演奏部件包括固定端和自由端,在所述演奏部件的固定端连接有力矩传感器。
9.如权利要求8所述的乐器演奏机器人,其特征在于,在所述本体还安装有至少一个机械臂,在机械臂的末端安装有所述演奏部件;其中,所述机械臂上安装有至少一个所述驱动部件作为活动关节,所述活动关节与所述力矩传感器的固定端连接,所述力矩传感器的检测端与所述演奏部件的固定端。
10.如权利要求9所述的乐器演奏机器人,其特征在于,所述活动关节包括肩关节、肘关节和腕关节中的至少之一,其中,所述肩关节包括相互配合的伺服电机和行星减速器;所述肘关节包括直接驱动电机;所述腕关节包括一体式伺服电机。
技术总结
本申请公开了一种乐器演奏机器人的控制方法和乐器演奏机器人,乐器演奏机器人包括:本体、至少一个演奏部件、用于驱动演奏部件的驱动部件,在乐器发声处还设置有音频传感器,控制方法包括:获取音频传感器采集的实际音频参数,实际音频参数为乐器演奏机器人基于音乐文件演奏的音乐的音高参数、频率参数和节拍参数中的至少之一;基于实际音频参数生成用于调整驱动部件的调整参数;基于调整参数对驱动部件进行调整,以调整乐器演奏机器人的演奏动作序列。获取到实际音频参数后,基于实际音频参数实际的延时状态对驱动部件的驱动参数进行重新调整,以减少实际演奏的音频与音乐播放器中播放的音乐存在延时现象,提升演奏效果。
技术研发人员:陈应亚
受保护的技术使用者:陈应亚
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!