一种基于力位混合控制的装配装置的制作方法
1.本实用新型涉及零部件装配装置,具体的,涉及一种基于力位混合控制的装配装置。
背景技术:
2.机械手是模仿人手或臂的某些功能,以抓取、搬运物件或进行其他操作的装置,被广泛应用于工业生产线上代替人工进行相关的装配工作,以实现生产的机械化和自动化,同时机械手也能够在有害环境下操作以保护人身安全,但是现有的机械手在进行装配工件时,不易控制装配力度,装配效果不佳,无法满足装配需求。
技术实现要素:
3.本实用新型的目的在于,针对上述问题,提出一种基于力位混合控制的装配装置。
4.一种基于力位混合控制的装配装置,包括:底座1、机械臂2、机械抓手4、压力传感器3和控制器;
5.所述机械臂2固定于底座1上,机械臂2的端部连接有机械抓手4,所述机械抓手4包括托板底盘5,所述托板底盘5上设置有三个呈三角形分布的抓料手臂,所述抓料手臂包括电动缸6、推杆7、顶部抓臂8和支撑板9,支撑板9的一端固设于托板底盘5上,电动缸6沿支撑板9长度方向设置,电动缸6的缸体经铰链座15铰接于托板底盘5上,电动缸6的输出端连接有推杆7,推杆7的作用端铰接有顶部抓臂8,且顶部抓臂8与推杆7的铰接点位于推杆7与顶部抓臂8铰接点的下方;所述托板底盘5上还固定安装有旋转气缸10,旋转气缸10位于任意两个抓料手臂之间,旋转气缸10的转轴上固设有抬板11;
6.所述机械抓手4上连接压力传感器3,监测部件之间的接触力;
7.所述控制器接收来自压力传感器3的数据,监测装配过程中力的变化,并进行调试。
8.优选的,所述支撑板9的顶部固设有罩壳;电动缸6罩设于罩壳下方;支撑板9的底部固设有安装板12,安装板的底部设置有多个吸盘13,吸盘13均与抽真空装置连接;所述抬板11上套有橡胶套;所述抬板垂直于托板底盘5设置。
9.优选的,所述机械臂2为六关节机器人。
10.优选的,所述压力传感器3为六维力传感器。
11.本实用新型的有益效果:使用机械手压力传感器的装配装置,通过机械臂、机械抓手和压力传感器的配合,能够通过压力控制对产品进行组装,可有效控制装配力度,提升装配质量和装配效率。
附图说明
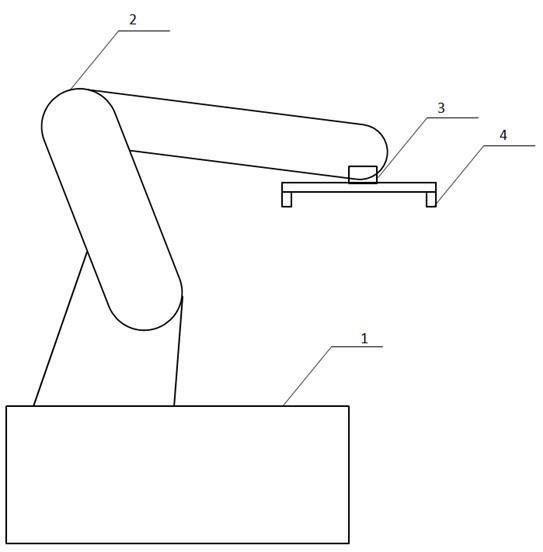
12.图1为本实用新型的装置结构图。
13.图2为本实用新型的抓手结构图。
14.图3为图2的i部局部放大视图。
15.图中:1-底座、2-机械臂、3-压力传感器、4-机械抓手、5-托板底盘、6-电动缸、7-推杆、8-顶部抓臂、9-支撑板、10-旋转气缸、11-抬板、12-安装板、13-吸盘、14-板料、15-铰链座。
具体实施方式
16.下面结合附图对本实用新型作进一步的说明。
17.如图1所示,一种基于力位混合控制的装配装置,包括:底座1、机械臂2、机械抓手4、压力传感器3和控制器;
18.所述机械臂2固定于底座上,机械臂2端部连接有机械抓手;
19.所述机械抓手4上连接压力传感器3,监测部件之间的接触力;
20.所述控制器接收来自压力传感器3的数据,监测装配过程中力的变化,并进行调试。
21.需要理解的是,所述压力传感器3为六维力传感器。
22.如图2-3所示, 机械抓手包括托板底盘5,所述托板底盘5上设置有三个呈三角形分布的抓料手臂,所述抓料手臂包括电动缸6、推杆7、顶部抓臂8和支撑板9,支撑板9的一端固设于托板底盘上5,电动缸6沿支撑板9长度方向设置,电动缸6的缸体经铰链座15铰接于托板底盘5上,电动缸6的输出端连接有推杆7,推杆7的作用端铰接有顶部抓臂8,且顶部抓臂8与推杆7的铰接点位于推杆7与顶部抓臂8铰接点的下方;所述托板底盘5上还固定安装有旋转气缸10,旋转气缸10位于任意两个抓料手臂之间,旋转气缸10的转轴上固设有抬板11;所述抬板11上套有橡胶套,所述抬板11垂直于托板底盘5设置,橡胶套用于防止夹伤板料。
23.需要理解的是,所述支撑板9的顶部设有罩壳,所述电动缸6罩设于罩壳下方;所述支撑板9的底部固设有安装板12,安装板12的底部设置有多个吸盘13,吸盘13均与抽真空装置连接,抽真空装置能够使吸盘13内为真空,使吸盘13将板料14抓住。
技术特征:
1.一种基于力位混合控制的装配装置,其特征在于,包括:底座(1)、机械臂(2)、机械抓手(4)、压力传感器(3)和控制器;所述机械臂(2)固定于底座(1)上,机械臂(2)的端部连接有机械抓手(4),所述机械抓手(4)包括托板底盘(5),所述托板底盘(5)上设置有三个呈三角形分布的抓料手臂,所述抓料手臂包括电动缸(6)、推杆(7)、顶部抓臂(8)和支撑板(9),支撑板(9)的一端固设于托板底盘(5)上,电动缸(6)沿支撑板(9)长度方向设置,电动缸(6)的缸体经铰链座(15)铰接于托板底盘(5)上,电动缸(6)的输出端连接有推杆(7),推杆(7)的作用端铰接有顶部抓臂(8),且顶部抓臂(8)与推杆(7)的铰接点位于推杆(7)与顶部抓臂(8)铰接点的下方;所述托板底盘(5)上还固定安装有旋转气缸(10),旋转气缸(10)位于任意两个抓料手臂之间,旋转气缸(10)的转轴上固设有抬板(11);所述机械抓手(4)上连接压力传感器(3),监测部件之间的接触力;所述控制器接收来自压力传感器(3)的数据,监测装配过程中力的变化,并进行调试。2.如权利要求1所述一种基于力位混合控制的装配装置,其特征在于,所述支撑板(9)的顶部固设有罩壳;电动缸(6)罩设于罩壳下方;支撑板(9)的底部固设有安装板(12),安装板(12)的底部设置有多个吸盘(13),吸盘(13)均与抽真空装置连接;所述抬板(11)上套有橡胶套;所述抬板(11)垂直于托板底盘(5)设置。3.如权利要求1所述一种基于力位混合控制的装配装置,其特征在于,所述机械臂为六关节机器人。4.如权利要求1所述一种基于力位混合控制的装配装置,其特征在于,所述压力传感器为六维力传感器。
技术总结
本实用新型公开了一种基于力位混合控制的装配装置,包括:底座(1)、机械臂(2)、机械抓手(4)、压力传感器(3)和控制器;所述机械臂(2)固定于底座(1)上,机械臂(2)端部连接有机械抓手(4);所述机械抓手(4)上连接压力传感器(3),监测部件之间的接触力;所述控制器接收来自压力传感器(3)的数据,监测装配过程中力的变化,并进行调试。本实用新型的有益效果:使用机械手压力传感器的装配装置,通过机械臂、机械抓手和压力传感器的配合,能够通过压力控制对产品进行组装,可有效控制装配力度,提升装配质量和装配效率。量和装配效率。量和装配效率。
技术研发人员:丁晓 郑愈红 李凯 谭青中 张宇
受保护的技术使用者:成都九系机器人科技有限公司
技术研发日:2021.01.11
技术公布日:2022/12/15
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1