用于污水处理检测智能巡检机器人变轨装置的制作方法
1.本实用新型涉及智能机器人设备领域,具体涉及用于污水处理检测智能巡检机器人变轨装置。
背景技术:
2.智能巡轨机器人,是在户外机型的基础上针对室内工作环境而设计的巡检机器人系统。智能巡轨机器人包括主体、蓄电池、移动机构、控制装置、升降机构,巡检机构和电池控制器;
3.一般情况下,智能巡轨机器人都是沿着单一导轨移动的,多条导轨就需要多台智能巡轨机器人,单一智能寻桂机器人做单导轨的巡检,使智能巡轨机器人的利用率降低,运行轨迹单一,不利于大规模的布置。
技术实现要素:
4.为了克服现有技术中的不足,本实用新型提出用于污水处理检测智能巡检机器人变轨装置,可以使智能巡轨机器人在两条导轨之间变轨,扩大智能巡轨机器人的运行轨迹。
5.为了实现上述目的,本实用新型的一种用于污水处理检测智能巡检机器人变轨装置,包括高低设置的充电段导轨、巡检段导轨、巡检机器人本体,充电段导轨和巡检段导轨之间设有变轨组件,变轨组件包括换位框、抬升装置、移动段导轨,换位框处于充电段导轨、巡检段导轨的轨迹上,移动段导轨沿着换位框纵向移动,移动段导轨通过滑动与充电段导轨、巡检段导轨其中之一持平,抬升装置设置在换位框内,且抬升装置与移动段导轨连接,用于驱动移动段导轨滑动,巡检机器人滑动设置在充电段导轨、巡检段导轨或者移动段导轨上,换位框中高低设置有两组限位开关。
6.进一步地,抬升装置包括定滑轮、钢缆、电机,定滑轮转动连接在换位框的内侧顶部,电机的转轴与定滑轮固定连接,钢缆绕卷在定滑轮上,且钢缆的一端与移动段导轨固定连接。
7.进一步地,充电段导轨上设有充电箱、支架,支架与充电段导轨固定连接,充电箱处于充电段导轨的轨迹上。
8.进一步地,换位框的外侧滑动连接有电动门。
9.进一步地,每组限位开关均设置为两个,同一组的两个限位开关高度一致,两组限位开关包括上限位开关和下限位开关,上限位开关处于移动段导轨的上侧,下限位开关处于移动段导轨的下侧。
10.进一步地,移动段导轨包括对接导轨、工字件,对接导轨固定在工字件上,换位框的内壁设有滑轮导轨,工字件沿滑轮导轨纵向滑动,钢缆固定在工字件上。
11.有益效果:通过变轨装置中的抬升装置来驱动移动段导轨在充电段导轨、巡检段导轨之间切换,智能巡检机器人随着移动段导轨移动而在充电段导轨和巡检段导轨之间切换,增加了运行轨迹。
附图说明
12.下面结合附图对本实用新型作进一步描写和阐述。
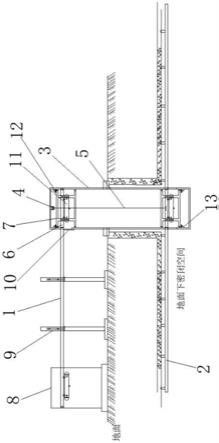
13.图1是本实用新型首选实施方式的整体的结构示意图;
14.图2是换位框内的结构示意图。
15.附图标记:1、充电段导轨;2、巡检段导轨;3、换位框;4、滑轮;5、钢缆;6、对接导轨;7、工字件;8、充电箱;9、支架;10、电动门;11、巡检机器人本体;12、上限位开关;13、下限位开关;14、滑轮导轨。
具体实施方式
16.下面将结合附图、通过对本实用新型的优选实施方式的描述,更加清楚、完整地阐述本实用新型的技术方案。
17.如图1所示,本实用新型首选实施方式的用于污水处理检测智能巡检机器人变轨装置,包括高低设置的充电段导轨1、巡检段导轨2,充电段导轨1设置在地面以上,巡检段导轨2设置在地面以下。巡检机器人本体11沿充电段导轨1、巡检段导轨2的轨迹滑动设置,充电段导轨1和巡检段导轨2之间设有变轨组件,变轨组件横跨在充电段导轨1、巡检段导轨2之间,且变轨组件与充电段导轨1以及巡检段导轨2的轨迹均有交集,变轨组件用于将巡轨机器人本体在充电段导轨1、巡检段导轨2之间相互切换。
18.如图2所示,变轨组件包括换位框3、抬升装置、移动段导轨。换位框3处于地面上,内部空心设置,抬升装置处于换位框3的内部,抬升装置纵向滑动连接在换位框3的内部,抬升装置与移动段导轨连接,用于驱动移动段导轨移动。
19.抬升装置包括定滑轮4、钢缆5、电机,定滑轮4转动连接在换位框3的内侧顶部,电机固定在换位框3的内壁顶部,且电机的转轴与定滑轮4同轴连接,电机用于驱动定滑轮4转动,钢缆5绕卷在定滑轮4上,钢缆5的一端与移动段导轨连接,又定滑轮4通过钢缆5带动移动段轨道上下移动。
20.移动段导轨包括对接导轨6、工字件7,对接导轨6固定在工字件7上,工字件7沿换位框3滑动,钢缆5固定在工字件7上。换位框3的内壁设有滑轮导轨14,工字件7沿着滑轮导轨14纵向移动时,对接导轨6与充电段导轨1或者巡检段导轨2中的其中一个对齐。巡检机器人本体11也由对接导轨6过渡,在充电段导轨1和巡检段导轨2之间移动。
21.在充电段导轨1的轨迹上设有充电箱8、支架9。巡检机器人本体11运行至充电箱8的位置时,由充电箱8给巡检机器人本体11充电,充电方式可以采用无线充电,或者导线接触式充电。
22.支架9安装在地面上,用于支撑充电段导轨1,支架9沿充电段导轨1的长度方向至少设有两个。
23.换位框3朝向充电段导轨1的一侧设有电动门10,电动门10由安装在换位框3外侧的电机控制,该电机的转轴与电动门10螺纹连接,电动门10又滑动连接在换位框3上,在电机的驱动下,电动门10会封闭换位框3上巡轨机器人本体进入到换位框3中的通道。
24.换位框3中设有两组限位开关,两组限位开关分别为两个上限位开关12和两个下限位开关13,两个上限位开关12处于同一高度,两个下限位开关13处于同一高度,且上限位开关12处于工字件7的顶部,下限位开关13处于工字件7的底部,上限位开关12、下限位开关
13、以及前述的电机均由plc控制器统一控制。每次上限位开关12或者下限位开关13中的两个均接收到信号,说明工字件7的运行位置到达预定位置,才会进入下一步动作。
25.上述具体实施方式仅仅对本实用新型的优选实施方式进行描述,而并非对本实用新型的保护范围进行限定。在不脱离本实用新型设计构思和精神范畴的前提下,本领域的普通技术人员根据本实用新型所提供的文字描述、附图对本实用新型的技术方案所作出的各种变形、替代和改进,均应属于本实用新型的保护范畴。本实用新型的保护范围由权利要求确定。
技术特征:
1.一种用于污水处理检测智能巡检机器人变轨装置,包括高低设置的充电段导轨、巡检段导轨、巡检机器人本体,其特征在于,所述充电段导轨和巡检段导轨之间设有变轨组件,所述变轨组件包括换位框、抬升装置、移动段导轨,所述换位框处于充电段导轨、巡检段导轨的轨迹上,所述移动段导轨沿着所述换位框纵向移动,所述移动段导轨通过滑动与充电段导轨、巡检段导轨其中之一持平,所述抬升装置设置在换位框内,且所述抬升装置与移动段导轨连接,用于驱动移动段导轨滑动,所述巡检机器人滑动设置在充电段导轨、巡检段导轨或者移动段导轨上,所述换位框中高低设置有两组限位开关。2.根据权利要求1所述的用于污水处理检测智能巡检机器人变轨装置,其特征在于,所述抬升装置包括定滑轮、钢缆、电机,所述定滑轮转动连接在换位框的内侧顶部,所述电机的转轴与定滑轮固定连接,所述钢缆绕卷在定滑轮上,且所述钢缆的一端与移动段导轨固定连接。3.根据权利要求1所述的用于污水处理检测智能巡检机器人变轨装置,其特征在于,所述充电段导轨上设有充电箱、支架,所述支架与充电段导轨固定连接,所述充电箱处于充电段导轨的轨迹上。4.根据权利要求1所述的用于污水处理检测智能巡检机器人变轨装置,其特征在于,所述换位框的外侧滑动连接有电动门。5.根据权利要求1所述的用于污水处理检测智能巡检机器人变轨装置,其特征在于,每组所述限位开关均设置为两个,同一组的两个所述限位开关高度一致,两组所述限位开关包括上限位开关和下限位开关,所述上限位开关处于移动段导轨的上侧,所述下限位开关处于移动段导轨的下侧。6.根据权利要求2所述的用于污水处理检测智能巡检机器人变轨装置,其特征在于,所述移动段导轨包括对接导轨、工字件,所述对接导轨固定在工字件上,所述换位框的内壁设有滑轮导轨,所述工字件沿滑轮导轨纵向滑动,所述钢缆固定在工字件上。
技术总结
本实用新型的一种用于污水处理检测智能巡检机器人变轨装置,包括高低设置的充电段导轨、巡检段导轨、巡检机器人本体,充电段导轨和巡检段导轨之间设有变轨组件,变轨组件包括换位框、抬升装置、移动段导轨,换位框处于充电段导轨、巡检段导轨的轨迹上,移动段导轨沿着换位框纵向移动,移动段导轨通过滑动与充电段导轨、巡检段导轨其中之一持平,抬升装置设置在换位框内,且抬升装置与移动段导轨连接,用于驱动移动段导轨滑动,巡检机器人滑动设置在充电段导轨、巡检段导轨或者移动段导轨上,换位框中高低设置有两组限位开关。该变轨装置可以使智能巡轨机器人在两条导轨之间变轨,扩大智能巡轨机器人的运行轨迹。能巡轨机器人的运行轨迹。能巡轨机器人的运行轨迹。
技术研发人员:尚传平 王政委 刘贵华 仲杨
受保护的技术使用者:江苏奥尼斯环保科技有限公司
技术研发日:2021.01.19
技术公布日:2021/12/10
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1