微型磁吸附内窥爬越检测机器人
1.本实用新型涉及复杂机械设备检测装置领域,尤其涉及一种微型磁吸附内窥爬越检测机器人。
背景技术:
2.现有的机械设备检修方式是通过将设备进行拆卸后进行检修。其大部分程序都需要通过人工操作来实现,且因考虑运行的安全性,设备的内部部件都需要进行检修,耗费时间过长,不但会影响生产效率,还会造成巨大的经济损失。
技术实现要素:
3.针对上述现有技术中的不足,本实用新型提供一种微型磁吸附内窥爬越检测机器人,能够达到在不对复杂机械设备进行拆卸的情况下,在设备内部空间进行爬越,通过图像采集的方式对其进行初步的检查,寻找出可能存在损伤的部件,使后续的检测更加具有目的性;减少对设备的损伤,检查的时间和成本。
4.为了实现上述目的,本实用新型提供一种微型磁吸附内窥爬越检测机器人,包括四个腿轮结构、两车体、两连接杆、多个永磁材料轮、一摄像头和一控制器;两所述连接杆的第一端枢接,所述连接杆的第一端的外侧安装有所述永磁材料轮;两所述连接杆的第二端分别通过第一电机连接两所述车体的第一端;每一所述车体的第二端通过第二电机连接两腿轮结构,所述车体的第二端的外侧安装有所述永磁材料轮;每一所述腿轮结构远离所述车体的一端通过第三电机连接一所述永磁材料轮;所述摄像头和所述控制器安装于所述车体上;所述控制器与所述腿轮结构、所述摄像头、所述第一电机、所述第二电机和所述第三电机电连接。
5.优选地,所述腿轮结构包括一第一连接部、一伸缩电机、一舵机和一第二连接部;所述第一连接部的第一端通过所述第二电机连接所述车体;所述第一连接部的第二端通过所述伸缩电机连接所述舵机;所述舵机连接于所述伸缩电机与所述第二连接部的第一端之间;所述第二连接部的第二端通过所述第三电机连接所述永磁材料轮;所述伸缩电机和所述舵机与所述控制器电连接。
6.优选地,还包括一辅助光源,所述辅助光源安装于所述车体上并连接所述控制器。
7.优选地,所述永磁材料轮外套设有一橡胶保护套。
8.优选地,所述摄像头采用可转动式红外线高清摄像头。
9.本实用新型由于采用了以上技术方案,使其具有以下有益效果:
10.本实用新型通过腿轮结构、两车体、两连接杆和多个永磁材料轮的配合,体积小、运动灵活、可以在复杂的复杂机械设备内部空间进行移动的具有良好越障及翻越功能;永磁材料轮的采用,依靠磁性附着,使用永磁材料轮在复杂设备内部部件上进行行走。通过摄像头和控制器的配合,可实现设备内部空间及表面的图片采集及传输,在车体安装可转动式红外线高清摄像头,并安装辅助光源,可在黑暗的情况下对设备内部进行图像采集。
附图说明
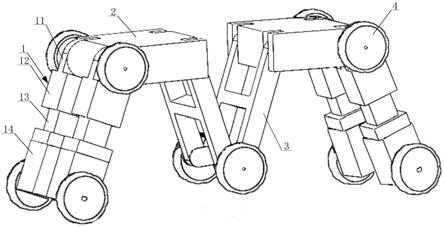
11.图1为本实用新型实施例的微型磁吸附内窥爬越检测机器人的结构示意图。
具体实施方式
12.下面根据附图图1,给出本实用新型的较佳实施例,并予以详细描述,使能更好地理解本实用新型的功能、特点。
13.请参阅图1,本实用新型实施例的一种微型磁吸附内窥爬越检测机器人,包括四个腿轮结构1、两车体2、两连接杆3、多个永磁材料轮4、一摄像头和一控制器;两连接杆3的第一端枢接,连接杆3的第一端的外侧安装有永磁材料轮4;两连接杆3的第二端分别通过第一电机连接两车体2的第一端;每一车体2的第二端通过第二电机连接两腿轮结构1,车体2的第二端的外侧安装有永磁材料轮4;每一腿轮结构1远离车体2的一端通过第三电机连接一永磁材料轮4;摄像头和控制器安装于车体2上;控制器与腿轮结构1、摄像头、第一电机、第二电机和第三电机电连接。
14.腿轮结构1包括一第一连接部11、一伸缩电机12、一舵机13和一第二连接部14;第一连接部11的第一端通过第二电机连接车体2;第一连接部11的第二端通过伸缩电机12连接舵机13;舵机13连接于伸缩电机12与第二连接部14的第一端之间;第二连接部14的第二端通过第三电机连接永磁材料轮4;伸缩电机12和舵机13与控制器电连接。
15.还包括一辅助光源,辅助光源安装于车体2上并连接控制器。
16.永磁材料轮4外套设有一橡胶保护套。
17.摄像头采用可转动式红外线高清摄像头。
18.本实用新型实施例的一种微型磁吸附内窥爬越检测机器人,使用腿轮复合机构,腿轮结构1通过第二电机与车体2连接,并驱动,每根腿轮结构1都可单独摆动。轮子采用永磁材料轮4,带有橡胶保护套,可使车体2在复杂机械设备内部部件上实现磁吸附,并且不损伤设备部件,即使小车在故障或断电的情况下也不会脱落。轮子通过直流减速电机进行驱动,可实现小车在设备内部空间中的移动,两车体2对称,功能相同,支持双向移动。
19.机器人在移动过程中,若遇到高低地势,通过伸缩电机12升高车体2抬起连接杆3的第一端的外侧的永磁材料轮4完成高低地势翻越。
20.若遇到突起障碍,通过第一电机和第二电机张开车体2,通过伸缩电机12补偿距离,通过永磁材料轮4吸附附着障碍表面,完成蛇形爬越。
21.另外可通过一对腿轮结构1远离车体2的一端的永磁材料轮4,配合车体2的第二端的外侧的永磁材料轮4吸附在竖直墙体表面。随后通过第一电机和第二电机将连接杆3抬高,使连接杆3的第一端的外侧的永磁材料轮4吸附在屋顶水平面,再通过第一电机和第二电机将另一对腿轮结构1远离车体2的一端的永磁材料轮4吸附到屋顶,完成倒l形爬越,适用于复杂地形。
22.机器人尺寸为长180mm,宽、高90mm。
23.在整个工作过程中,机器人的检测是一种高度自动化的控制。工作人员可通过远程控制小车在复杂机械设备中的运动。
24.1、机器人由操作人员放置于复杂机械设备中的部件表面,通过吸附装置吸附于铁磁部件,之后操作人员通过触摸屏来控制电机使得完成机器人的水平移动。
25.2、机器人到达指定位置后,摄像头开启,收集设备内部部件表面的图像信息并发送给操作人员进行分析。
26.在机器人发送设备内部部件表面图像信息,操作人员进行分析后,即可得出需要进行重点检测的位置,再对复杂机械设备进行整体检测后,取出机器人并进行下一步检修。
27.在现有的建立的整体系统上,机器人可实现在不拆卸相关复杂机械设备的情况下在其内部运动并采集图像信息,可大大减少因拆卸和整体检测所消耗的时间和人力资源,提高了工作效率并和经济效益。机器人具有高自由度,微型体积,适用于多种复杂可吸附地形,适合狭小环境,或需爬越环境。
28.以上结合附图实施例对本实用新型进行了详细说明,本领域中普通技术人员可根据上述说明对本实用新型做出种种变化例。因而,实施例中的某些细节不应构成对本实用新型的限定,本实用新型将以所附权利要求书界定的范围作为本实用新型的保护范围。
技术特征:
1.一种微型磁吸附内窥爬越检测机器人,其特征在于,包括四个腿轮结构、两车体、两连接杆、多个永磁材料轮、一摄像头和一控制器;两所述连接杆的第一端枢接,所述连接杆的第一端的外侧安装有所述永磁材料轮;两所述连接杆的第二端分别通过第一电机连接两所述车体的第一端;每一所述车体的第二端通过第二电机连接两腿轮结构,所述车体的第二端的外侧安装有所述永磁材料轮;每一所述腿轮结构远离所述车体的一端通过第三电机连接一所述永磁材料轮;所述摄像头和所述控制器安装于所述车体上;所述控制器与所述腿轮结构、所述摄像头、所述第一电机、所述第二电机和所述第三电机电连接。2.根据权利要求1所述的微型磁吸附内窥爬越检测机器人,其特征在于,所述腿轮结构包括一第一连接部、一伸缩电机、一舵机和一第二连接部;所述第一连接部的第一端通过所述第二电机连接所述车体;所述第一连接部的第二端通过所述伸缩电机连接所述舵机;所述舵机连接于所述伸缩电机与所述第二连接部的第一端之间;所述第二连接部的第二端通过所述第三电机连接所述永磁材料轮;所述伸缩电机和所述舵机与所述控制器电连接。3.根据权利要求1所述的微型磁吸附内窥爬越检测机器人,其特征在于,还包括一辅助光源,所述辅助光源安装于所述车体上并连接所述控制器。4.根据权利要求1所述的微型磁吸附内窥爬越检测机器人,其特征在于,所述永磁材料轮外套设有一橡胶保护套。5.根据权利要求1所述的微型磁吸附内窥爬越检测机器人,其特征在于,所述摄像头采用可转动式红外线高清摄像头。
技术总结
本实用新型提供一种微型磁吸附内窥爬越检测机器人,包括四个腿轮结构、两车体、两连接杆、多个永磁材料轮、一摄像头和一控制器;两连接杆的第一端枢接,连接杆的第一端的外侧安装有永磁材料轮;两连接杆的第二端分别通过第一电机连接两车体的第一端;每一车体的第二端通过第二电机连接两腿轮结构,车体的第二端的外侧安装有永磁材料轮;每一腿轮结构远离车体的一端通过第三电机连接一永磁材料轮。本实用新型的一种微型磁吸附内窥爬越检测机器人,能够在不对设备进行拆卸的情况下,在设备内部进行爬越,通过图像采集的方式对其进行初步的检查,使后续的检测更加具有目的性;减少设备损伤检查的时间和成本。伤检查的时间和成本。伤检查的时间和成本。
技术研发人员:权家朋 童晨越 姜佳俊 刘俊
受保护的技术使用者:上海电机学院
技术研发日:2021.04.12
技术公布日:2021/11/5
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1