一种高速精密机械手传动机构的制作方法
1.本实用新型涉及一种机械手技术,特别涉及一种高速精密机械手传动机构。
背景技术:
2.注塑机是一种利用塑料成型模具,将热塑性塑料或热固定性塑料制成各种形状的塑料制品的主要成型设备。其工作时需要将固态原料融化,然后通过送料管和喷嘴注射到模具中成型,成型后的注塑件通过机械手需搬运至下一工位进行再加工,机械手在搬运后需要返回原位。在现有技术中,机械手的往复运动是通过伺服电机的正转与反转来实现的,而这种伺服电机的正转与反转则是通过设计的不同驱动电路来实现伺服电机的旋转,其成本过高,不利于小微企业的发展。
技术实现要素:
3.为了解决上述现有技术中的不足,本实用新型的目的在于提供一种高速精密机械手传动机构,该传动机构在实现机械手能够往复移动的基础上,降低了成本。
4.本实用新型解决其技术问题所采用的技术方案为:一种高速精密机械手传动机构,包括机械手本体,所述机械手本体通过第一水平移动单元以及第二水平移动单元安装在注塑机的机架上,所述第一水平移动单元与第二水平移动单元垂直分布;
5.所述第一水平移动单元以及第二水平移动单元中分别设有传动单元,使得所述机械手本体通过传动单元沿第一水平移动单元在第一水平方向上移动,所述第一水平移动单元通过传动单元沿第二水平移动单元在第二水平方向上移动;
6.所述传动单元包括丝杆副以及设置于丝杆副一端端部的驱动端,所述驱动端通过驱动单元驱动正转或反转,所述传动单元还包括用于切换所述驱动单元的切换机构,使得所述驱动单元的正转或反转通过所述切换机构进行切换。
7.可选的,所述驱动端包括固定安装在所述丝杆副一端端部的柱体结构,所述柱体结构上设有传动齿;
8.所述柱体结构通过传动齿与驱动电机传动连接,使得所述柱体结构通过驱动电机驱动旋转。
9.可选的,所述切换机构包括第一齿轮以及第二齿轮,所述第一齿轮和第二齿轮啮合;
10.所述驱动电机的输出端与所述第一齿轮连接,并且所述柱体结构与第一齿轮或第二齿轮传动连接,使得所述柱体结构通过第一齿轮或第二齿轮驱动旋转。
11.可选的,所述第一齿轮以及第二齿轮的传动轴上还分别固定安装有传动齿轮,并且两个传动齿轮之间的间隙宽度大于所述柱体结构的外径。
12.可选的,所述切换机构还包括箱体结构,所述第一齿轮以及第二齿轮分别安装在所述箱体结构内,所述传动齿轮设于所述箱体结构的外部。
13.可选的,所述驱动电机固定安装在所述箱体结构的外侧。
14.可选的,所述箱体结构滑动连接在所述第一水平移动单元以及第二水平移动单元的端部。
15.采用上述技术方案,本实用新型与现有技术相比,具有以下有益效果:本实用新型设置的传动单元,其能够切换丝杆副的正转与反转状态,因而,相比于现有的正转与反转电路的设计,在实现机械手能够往复移动的基础上,降低了成本。
附图说明
16.图1是本实用新型的结构示意图;
17.图2是本实用新型的丝杆副的结构示意图;
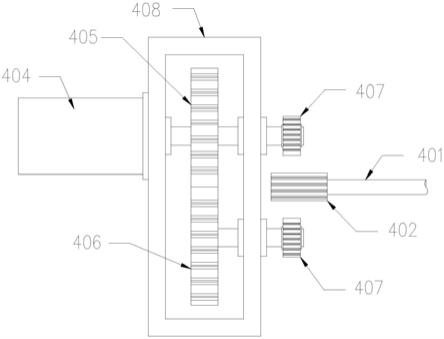
18.图3是本实用新型的传动单元的结构示意图。
具体实施方式
19.下面结合附图和实施例对本申请作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释相关实用新型,而非对该实用新型的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与实用新型相关的部分。
20.需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本申请。
21.如图1所示,本实用新型公开了一种高速精密机械手传动机构,其包括机械手本体1,机械手本体1通过第一水平移动单元2以及第二水平移动单元3安装在注塑机的机架上,第一水平移动单元2与第二水平移动单元3垂直分布,第一水平移动单元2以及第二水平移动单元3中分别设有传动单元4,使得机械手本体1通过传动单元4沿第一水平移动单元2在第一水平方向上移动,第一水平移动单元2通过传动单元4沿第二水平移动单元2在第二水平方向上移动,从而实现机械手本体1在水平方向上进行移动。
22.在本实用新型中,如图2和3所示,传动单元4包括丝杆副401以及设置于丝杆副401一端端部的驱动端,驱动端通过驱动单元驱动正转或反转,传动单元4还包括用于切换驱动单元的切换机构,使得驱动单元的正转或反转通过切换机构进行切换。
23.具体而言,如图2所示,驱动端包括固定安装在丝杆副401一端端部的柱体结构402,柱体结构402上设有传动齿403。柱体结构402通过传动齿403与驱动电机404传动连接,使得柱体结构402通过驱动电机404驱动旋转。
24.如图3所示,切换机构包括第一齿轮405以及第二齿轮406,第一齿轮405和第二齿轮406啮合。驱动电机404的输出端与第一齿轮405连接,并且柱体结构402与第一齿轮405或第二齿轮406传动连接,使得柱体结构402通过第一齿轮405或第二齿轮406驱动旋转。
25.为了便于第一齿轮405和第二齿轮406的输出扭矩能够更好的传递至柱体结构402,在第一齿轮405以及第二齿轮406的传动轴上还分别固定安装有传动齿轮407,并且两个传动齿轮407之间的间隙宽度大于柱体结构402的外径,这样,可将柱体结构402设置于两个传动齿轮407之间的位置。
26.如图3所示,切换机构还包括箱体结构408,第一齿轮405以及第二齿轮406分别安装在箱体结构408内,传动齿轮407设于箱体结构408的外部。驱动电机404固定安装在箱体结构408的外侧。箱体结构408滑动连接在第一水平移动单元2以及第二水平移动单元3的端
部。
27.在本实用新型中,驱动电机404始终朝向一个方向旋转,当两个传动齿轮407均未与柱体结构402的传动齿403啮合时,丝杆副401处于停止状态;当与第一齿轮405连接的传动齿轮407和柱体结构402啮合时,丝杆副401可通过第一齿轮405的驱动而正转;当与第二齿轮406连接的传动齿轮407和柱体结构402啮合时,丝杆副401可通过第二齿轮406的驱动而反转。而传动齿轮407与传动齿403的状态,则通过滑移箱体结构408来实现。由于传动齿轮407与传动齿403之间的状态保持需要停止箱体结构408,因此,箱体结构408的滑移可通过气缸来实现,即将气缸的输出轴与箱体结构408固定连接,而气缸的行程则与传动齿轮407与传动齿403之间的状态相对应。
28.以上描述仅为本申请的较佳实施例以及对所运用技术原理的说明。本领域技术人员应当理解,本申请中所涉及的实用新型范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离所述实用新型构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本申请中公开的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。
29.除说明书所述的技术特征外,其余技术特征为本领域技术人员的已知技术,为突出本实用新型的创新特点,其余技术特征在此不再赘述。
技术特征:
1.一种高速精密机械手传动机构,其特征在于,包括机械手本体(1),所述机械手本体(1)通过第一水平移动单元(2)以及第二水平移动单元(3)安装在注塑机的机架上,所述第一水平移动单元(2)与第二水平移动单元(3)垂直分布;所述第一水平移动单元(2)以及第二水平移动单元(3)中分别设有传动单元(4),使得所述机械手本体(1)通过传动单元(4)沿第一水平移动单元(2)在第一水平方向上移动,所述第一水平移动单元(2)通过传动单元(4)沿第二水平移动单元(3)在第二水平方向上移动;所述传动单元(4)包括丝杆副(401)以及设置于丝杆副(401)一端端部的驱动端,所述驱动端通过驱动单元驱动正转或反转,所述传动单元(4)还包括用于切换所述驱动单元的切换机构,使得所述驱动单元的正转或反转通过所述切换机构进行切换。2.根据权利要求1所述的一种高速精密机械手传动机构,其特征在于,所述驱动端包括固定安装在所述丝杆副(401)一端端部的柱体结构(402),所述柱体结构(402)上设有传动齿(403);所述柱体结构(402)通过传动齿(403)与驱动电机(404)传动连接,使得所述柱体结构(402)通过驱动电机(404)驱动旋转。3.根据权利要求2所述的一种高速精密机械手传动机构,其特征在于,所述切换机构包括第一齿轮(405)以及第二齿轮(406),所述第一齿轮(405)和第二齿轮(406)啮合;所述驱动电机(404)的输出端与所述第一齿轮(405)连接,并且所述柱体结构(402)与第一齿轮(405)或第二齿轮(406)传动连接,使得所述柱体结构(402)通过第一齿轮(405)或第二齿轮(406)驱动旋转。4.根据权利要求3所述的一种高速精密机械手传动机构,其特征在于,所述第一齿轮(405)以及第二齿轮(406)的传动轴上还分别固定安装有传动齿轮(407),并且两个传动齿轮(407)之间的间隙宽度大于所述柱体结构(402)的外径。5.根据权利要求4所述的一种高速精密机械手传动机构,其特征在于,所述切换机构还包括箱体结构(408),所述第一齿轮(405)以及第二齿轮(406)分别安装在所述箱体结构(408)内,所述传动齿轮(407)设于所述箱体结构(408)的外部。6.根据权利要求5所述的一种高速精密机械手传动机构,其特征在于,所述驱动电机(404)固定安装在所述箱体结构(408)的外侧。7.根据权利要求6所述的一种高速精密机械手传动机构,其特征在于,所述箱体结构(408) 滑动连接在所述第一水平移动单元(2)以及第二水平移动单元(3)的端部。
技术总结
本实用新型公开了一种高速精密机械手传动机构,包括机械手本体,机械手本体通过第一水平移动单元以及第二水平移动单元安装在注塑机的机架上,第一水平移动单元与第二水平移动单元垂直分布;第一水平移动单元以及第二水平移动单元中分别设有传动单元,使得机械手本体通过传动单元沿第一水平移动单元在第一水平方向上移动,第一水平移动单元通过传动单元沿第二水平移动单元在第二水平方向上移动;传动单元包括丝杆副以及设置于丝杆副一端端部的驱动端,驱动端通过驱动单元驱动正转或反转,传动单元还包括用于切换驱动单元的切换机构,使得驱动单元的正转或反转通过切换机构进行切换。本实用新型在实现机械手能够往复移动的基础上,降低了成本。降低了成本。降低了成本。
技术研发人员:李杰
受保护的技术使用者:嘉鸿智能科技(嘉兴)有限公司
技术研发日:2021.05.28
技术公布日:2021/12/7
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1