一种可调节预紧力机构
1.本实用新型涉及助力外骨骼机器人技术领域,特别是涉及一种可调节预紧力机构。
背景技术:
2.近年来外骨骼机器人,越来越多的出现在大众视线内。包括无源外骨骼、有源外骨骼。无源外骨骼中的负重外骨骼中,需要对小腿部分进行助力,从而在负重行走过程中起到减轻肌肉拉力的作用,因此,亟需一种可调节预紧力机构。
技术实现要素:
3.为解决以上技术问题,本实用新型提供一种可调节预紧力机构,用于无源外骨骼中的负重外骨骼中,以实现对不同体型的人的小腿进行助力。
4.为实现上述目的,本实用新型提供了如下方案:
5.本实用新型提供一种可调节预紧力机构,包括预紧结构活动端、预紧结构、安装座和弹性件;所述安装座底部用于与外骨骼结构的脚部组件相连接,所述安装座的顶部与所述预紧结构的底部相连接,所述预紧结构活动端位于所述预紧结构上方,所述预紧结构活动端底部与所述安装座之间通过所述弹性件相连接;所述预紧结构活动端的顶部用于与外骨骼结构的小腿组件相连接。
6.可选的,所述安装座包括上部和下部,上部和下部之间通过转轴可转动连接,下部用于与外骨骼结构的脚部组件相连接,上部与所述预紧结构的底部相连接;所述弹性件底部与所述转轴相连接。
7.可选的,所述上部和所述下部均为u型结构,所述上部的开口端两侧和所述下部的开口端两侧相对应的设置有连接通孔,所述转轴贯穿全部的所述连接通孔。
8.可选的,所述下部的封口端上设置有螺栓孔,所述螺栓孔用于与外骨骼结构的脚部组件相连接。
9.可选的,所述预紧结构包括预紧端和预紧座;所述预紧座与所述预紧端之间的相对高度可调节。
10.可选的,所述预紧座中部设置有内螺纹孔,所述预紧端下部设置有外螺纹杆,所述内螺纹孔与所述外螺纹杆相匹配,通过调节所述外螺纹杆拧入所述内螺纹孔中的深度以实现所述预紧座与所述预紧端之间的相对高度可调节。
11.可选的,所述弹性件为弹性带。
12.可选的,所述预紧结构活动端为矩形环。
13.本实用新型相对于现有技术取得了以下技术效果:
14.本实用新型中的可调节预紧力机构,包括预紧结构活动端、预紧结构、安装座和弹性件;通过弹性件的拉力,可以在步行过程中帮助小腿回正,从而起到助力效果;通过调节预紧结构的长度,以改变弹性件的最小长度,实现改变预紧力大小的技术效果,以适应不同
的负重情况。
附图说明
15.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
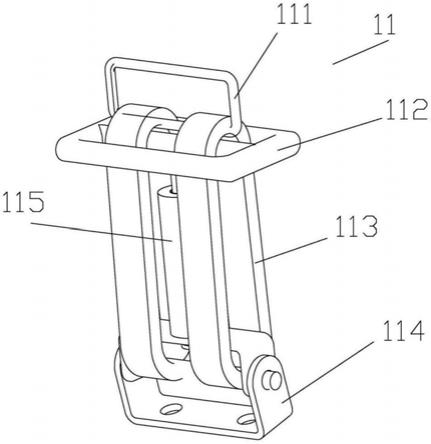
16.图1为本实用新型可调节预紧力机构的结构示意图。
17.附图标记说明:11、助力装置;
18.111、预紧结构活动端;112、预紧端;113、弹性件;114、安装座;115、预紧座。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.如图1所示,本实施例公开一种可调节预紧力机构,所述可调节预紧力机构11包括预紧结构活动端111、预紧端112、预紧座115、安装座114和弹性件113;安装座114包括上部和下部,上部和下部之间通过转轴可转动连接,下部与脚部组件相连接,上部与预紧座115的底部相连接;预紧座115与预紧端112之间的相对高度可调节,具体的,预紧座115内设置有内螺纹,预紧端112底部设置有外螺纹杆,外螺纹杆与内螺纹相匹配,通过调整外螺纹杆拧入内螺纹中的深度以调节预紧座115与预紧端112之间的相对高度;预紧端112上方设置有预紧结构活动端111,弹性件113为弹性带,弹性带113绕于座轴和预紧结构活动端上。预紧结构活动端111与小腿束板通过拉绳相连接,在人体步行过程中,弹性件113拉伸储存能量,并在下一个步伐过程中释放拉动小腿位置回正,从而起到助力的作用。
21.需要说明的是,对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内,不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
22.本说明书中应用了具体个例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的方法及其核心思想;同时,对于本领域的一般技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本实用新型的限制。
技术特征:
1.一种可调节预紧力机构,其特征在于,包括预紧结构活动端、预紧结构、安装座和弹性件;所述安装座底部用于与外骨骼结构的脚部组件相连接,所述安装座的顶部与所述预紧结构的底部相连接,所述预紧结构活动端位于所述预紧结构上方,所述预紧结构活动端底部与所述安装座之间通过所述弹性件相连接;所述预紧结构活动端的顶部用于与外骨骼结构的小腿组件相连接。2.根据权利要求1所述的可调节预紧力机构,其特征在于,所述安装座包括上部和下部,上部和下部之间通过转轴可转动连接,下部用于与外骨骼结构的脚部组件相连接,上部与所述预紧结构的底部相连接;所述弹性件底部与所述转轴相连接。3.根据权利要求2所述的可调节预紧力机构,其特征在于,所述上部和所述下部均为u型结构,所述上部的开口端两侧和所述下部的开口端两侧相对应的设置有连接通孔,所述转轴贯穿全部的所述连接通孔。4.根据权利要求3所述的可调节预紧力机构,其特征在于,所述下部的封口端上设置有螺栓孔,所述螺栓孔用于与外骨骼结构的脚部组件相连接。5.根据权利要求1所述的可调节预紧力机构,其特征在于,所述预紧结构包括预紧端和预紧座;所述预紧座与所述预紧端之间的相对高度可调节。6.根据权利要求5所述的可调节预紧力机构,其特征在于,所述预紧座中部设置有内螺纹孔,所述预紧端下部设置有外螺纹杆,所述内螺纹孔与所述外螺纹杆相匹配,通过调节所述外螺纹杆拧入所述内螺纹孔中的深度以实现所述预紧座与所述预紧端之间的相对高度可调节。7.根据权利要求1所述的可调节预紧力机构,其特征在于,所述弹性件为弹性带。8.根据权利要求1所述的可调节预紧力机构,其特征在于,所述预紧结构活动端为矩形环。
技术总结
本实用新型公开一种可调节预紧力机构,涉及助力外骨骼机器人技术领域,包括预紧结构活动端、预紧结构、安装座和弹性件;所述安装座底部用于与外骨骼结构的脚部组件相连接,所述安装座的顶部与所述预紧结构的底部相连接,所述预紧结构活动端位于所述预紧结构上方,所述预紧结构活动端底部与所述安装座之间通过所述弹性件相连接;所述预紧结构活动端的顶部用于与外骨骼结构的小腿组件相连接。通过弹性件的拉力,可以在步行过程中帮助小腿回正,从而起到助力效果;通过调节预紧结构的长度,以改变弹性件的最小长度,实现改变预紧力大小的技术效果,以适应不同的负重情况。以适应不同的负重情况。以适应不同的负重情况。
技术研发人员:郭建忠
受保护的技术使用者:北京理工大学前沿技术研究院
技术研发日:2021.08.23
技术公布日:2022/3/25
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1