一种机器人引导检测装置的制作方法
1.本实用新型提供一种机器人引导检测装置,属于机器人技术领域。
背景技术:
2.随着我国科技技术的大力发展,在机器人技术方面有了巨大的进步,为了适应更加激烈的国际社会上高精尖技术的需要,我们必须提高各个环节的质量,其中包括了检测机器运输的路线,由于零件过于精密,不能受到特别强烈的震动,所以需要运送的路面特别的平整,或者有很少的不平整的地方,所以需要一种检测机器人。
技术实现要素:
3.本实用新型为了解决上述问题,提供的一种机器人引导检测装置。为了解决上述问题,提供的技术方案为:一种机器人引导检测装置,包括机器本体,所述机器本体上侧面设有声光警报器,所述机器本体下侧面设有车轮,所述机器本体且位于两个车轮之间设有检测装置,所述检测装置包括位于机器本体内的空腔一,是空腔一内插接设有感应杆,所述感应杆向下延伸出空腔一外的一端设有滚珠,所述感应杆位于空腔一内的一端设有活动杆,所述活动杆内设有空腔二,所述活动杆两侧对称插接设有若干限位块一,所述限位块一位于空腔二的一端设有弹簧一,所述弹簧一与相互对称的另一侧的限位块一固定连接,所述活动杆上插接设有活动板,所述活动板与限位块一相互接触,所述空腔一内壁对称插接设有若干限位块二,所述机器本体关于空腔一对称设有空腔三,所述限位块二延伸进空腔三的一端均设有限位板,所述限位板远离空腔一的一侧设有若干弹簧二,所述弹簧二与空腔三内壁固定连接,所述活动板上设有一级金属板,所述空腔一内顶面对应一级金属板设有一级金属块,所述声光警报器与一级金属板和一级金属块电性连接。
4.本实用新型的优点在于:
5.本实用新型结构新颖,通过检测滑行的轨迹平整度来确定运送的路面是否合格。
6.进一步地,所述活动杆上设有二级金属板,所述空腔一内顶面对应二级金属板设有二级金属块,所述声光警报器与二级金属板和二级金属块电性连接,当遇到大块的凹凸不平的路面时可以直接出发警报,对此区域进行整改。
7.进一步地,所述二级金属块靠近空腔一内顶面的一侧设有弹簧三,所述弹簧三与空腔一内顶面固定连接,能为最后的接触提供移动的缓冲。
8.进一步地,所述一级金属块靠近空腔一内顶面的一侧设有弹簧四,所述弹簧四与空腔一固定连接。
9.进一步地,所述车轮外圈设有若干吸盘,增加与路面的摩擦力。
10.进一步地,所述限位块一位于空腔二内设有卡块一,限制限位块一的位置,避免滑出空腔二。
11.进一步地,所述限位块二位于空腔三内设于卡块二,限制限位块二的位置,避免滑出空腔三。
附图说明
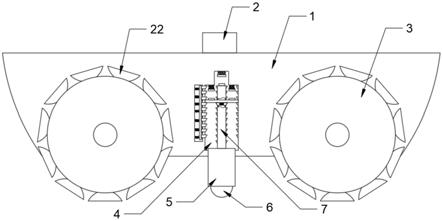
12.图1是本实用新型一种机器人引导检测装置的结构示意图。
13.图2是本实用新型一种机器人引导检测装置的检测装置的结构示意图。
14.图3是本实用新型一种机器人引导检测装置的a区域的结构示意图。
15.如图所示:
16.1、机器本体,2、声光警报器,3、车轮,4、空腔一,5、感应杆,6、滚珠,7、活动杆,8、空腔二,9、限位块一,10、弹簧一,11、活动板,12、限位块二,13、空腔三,14、限位板,15、弹簧二,16、一级金属板,17、一级金属块,18、二级金属板,19、二级金属块,20、弹簧三,21、弹簧四,22、吸盘,23、卡块一,24、卡块二。
具体实施方式
17.下面根据附图对本实用新型作进一步说明。
18.根据所有附图所示:
19.一种机器人引导检测装置,包括机器本体1,所述机器本体1上侧面设有声光警报器2,所述机器本体1下侧面设有车轮3,所述机器本体1且位于两个车轮3之间设有检测装置,所述检测装置包括位于机器本体1内的空腔一4,是空腔一4内插接设有感应杆5,所述感应杆5向下延伸出空腔一4外的一端设有滚珠6,所述感应杆5位于空腔一4内的一端设有活动杆7,所述活动杆7内设有空腔二8,所述活动杆7两侧对称插接设有若干限位块一9,所述限位块一9位于空腔二8的一端设有弹簧一10,所述弹簧一10与相互对称的另一侧的限位块一9固定连接,所述活动杆7上插接设有活动板11,所述活动板11与限位块一9相互接触,所述空腔一4内壁对称插接设有若干限位块二12,所述机器本体1关于空腔一3对称设有空腔三13,所述限位块二12延伸进空腔三13的一端均设有限位板14,所述限位板14远离空腔一4的一侧设有若干弹簧二15,所述弹簧二15与空腔三13内壁固定连接,所述活动板11上设有一级金属板16,所述空腔一4内顶面对应一级金属板16设有一级金属块17,所述声光警报器2与一级金属板16和一级金属块17电性连接。
20.进一步地,所述活动杆11上设有二级金属板18,所述空腔一4内顶面对应二级金属板18设有二级金属块19,所述声光警报器2与二级金属板18和二级金属块19电性连接,当遇到大块的凹凸不平的路面时可以直接出发警报,对此区域进行整改。
21.进一步地,所述二级金属块19靠近空腔一4内顶面的一侧设有弹簧三20,所述弹簧三20与空腔一4内顶面固定连接,能为最后的接触提供移动的缓冲。
22.进一步地,所述一级金属块17靠近空腔一4内顶面的一侧设有弹簧四21,所述弹簧四21与空腔一4固定连接。
23.进一步地,所述车轮3外圈设有若干吸盘22,增加与路面的摩擦力。
24.进一步地,所述限位块一9位于空腔二8内设有卡块一23,限制限位块一23的位置,避免滑出空腔二8。
25.进一步地,所述限位块二12位于空腔三13内设于卡块二24,限制限位块二12的位置,避免滑出空腔三13。
26.本实用新型在具体实施时:
27.接通电源,让机器本体1在路面进行测试,按照预定路线进行移动,让滚珠6在地面
上滑动,如果接触到一块较大的凸起,凸起带动感应杆5向上移动,使得二级金属板18与二级金属块19相互接触,给声光警报器2接通电源,发出警报,此段路面即为不合格路面,需要重新整修,当遇到小凸起时,感应杆5微微向上移动,在限位块一9和限位块二12的配合下能够将活动板11慢慢上升且不会下滑,当遇到过多小凸起,最终会导致一级金属板16和一级金属块18接触通电,声光警报器2发出声光信号时,改路面即为不合格,需要整改。
28.以上对本实用新型及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本实用新型的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本实用新型创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本实用新型的保护范围。
技术特征:
1.一种机器人引导检测装置,其特征在于:包括机器本体,所述机器本体上侧面设有声光警报器,所述机器本体下侧面设有车轮,所述机器本体且位于两个车轮之间设有检测装置,所述检测装置包括位于机器本体内的空腔一,是空腔一内插接设有感应杆,所述感应杆向下延伸出空腔一外的一端设有滚珠,所述感应杆位于空腔一内的一端设有活动杆,所述活动杆内设有空腔二,所述活动杆两侧对称插接设有若干限位块一,所述限位块一位于空腔二的一端设有弹簧一,所述弹簧一与相互对称的另一侧的限位块一固定连接,所述活动杆上插接设有活动板,所述活动板与限位块一相互接触,所述空腔一内壁对称插接设有若干限位块二,所述机器本体关于空腔一对称设有空腔三,所述限位块二延伸进空腔三的一端均设有限位板,所述限位板远离空腔一的一侧设有若干弹簧二,所述弹簧二与空腔三内壁固定连接,所述活动板上设有一级金属板,所述空腔一内顶面对应一级金属板设有一级金属块,所述声光警报器与一级金属板和一级金属块电性连接。2.根据权利要求1所述的一种机器人引导检测装置,其特征在于:所述活动杆上设有二级金属板,所述空腔一内顶面对应二级金属板设有二级金属块,所述声光警报器与二级金属板和二级金属块电性连接。3.根据权利要求2所述的一种机器人引导检测装置,其特征在于:所述二级金属块靠近空腔一内顶面的一侧设有弹簧三,所述弹簧三与空腔一内顶面固定连接。4.根据权利要求1所述的一种机器人引导检测装置,其特征在于:所述一级金属块靠近空腔一内顶面的一侧设有弹簧四,所述弹簧四与空腔一固定连接。5.根据权利要求1所述的一种机器人引导检测装置,其特征在于:所述车轮外圈设有若干吸盘。6.根据权利要求1所述的一种机器人引导检测装置,其特征在于:所述限位块一位于空腔二内设有卡块一。7.根据权利要求1所述的一种机器人引导检测装置,其特征在于:所述限位块二位于空腔三内设于卡块二。
技术总结
本实用新型提供一种机器人引导检测装置,属于机器人技术领域。包括机器本体,所述机器本体上侧面设有声光警报器,所述机器本体下侧面设有车轮,所述机器本体且位于两个车轮之间设有检测装置。本实用新型结构新颖,通过检测滑行的轨迹平整度来确定运送的路面是否合格。滑行的轨迹平整度来确定运送的路面是否合格。滑行的轨迹平整度来确定运送的路面是否合格。
技术研发人员:彭建华
受保护的技术使用者:重庆柔智机械设备制造有限公司
技术研发日:2021.08.30
技术公布日:2022/2/11
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1