一种带有防滑结构的三轴并联机械手的制作方法
1.本实用新型属于自动化生产加工技术领域,具体涉及一种自动抓取的三轴并联机械手。
背景技术:
2.机械手可以模仿人手进行物料抓取和搬运,因为机械手可以承受有毒、有害、高温等恶劣环境,因此为了保护人身安全,机械手广泛运用于生产中,不仅可以替代人力进行繁重的劳动,还可以有效地降低企业的人力成本。现有技术中对于抓取物品的机械手通常使用吸盘进行抓取,或者根据需要抓取的物品尺寸更改涉及机械手的尺寸,对物料的边缘进行卡接,一旦遇到表面光滑圆润的物品,则容易出现物品掉落的情况,轻则影响生产,重则砸伤工人,出现严重的生产事故。
技术实现要素:
3.本实用新型的目的,就是克服现有技术的不足,提供一种带有防滑结构、可以稳定抓取物品的机械手设备。
4.为了达到上述目的,本实用新型提供一种带有防滑结构的三轴并联机械手,包括机械手臂和抓取结构,所述抓取结构可拆卸连接在所述机械手臂的底部;所述机械手臂包括定平台、动平台、主动臂、从动臂和动力装置;所述动力装置、所述主动臂、所述从动臂的数量均为三个,所述动力装置、所述主动臂、所述从动臂呈中心对称分布;所述定平台用于承载和固定整个机械手臂,所述动力装置固定在所述定平台底面;所述主动臂的一端与所述动力装置转动连接,所述主动臂可以受所述动力装置的控制在竖直面上进行转动;所述主动臂的另一端与所述从动臂的一端转动连接,所述主动臂旋转时可以带动所述从动臂移动;所述从动臂的下端与所述动平台转动连接;所述抓取结构包括固定座、连接轴、控制盘和不少于三个的取料手指;所述固定座与所述动平台刚性连接;所述连接轴与所述固定座固定连接,所述固定座内设有旋转电机,所述连接轴内部设有旋转轴,所述控制盘设置在所述连接轴的下方,所述旋转电机通过所述旋转轴与所述控制盘连接,所述取料手指中心对称的分布在所述控制盘的下方,所述取料手指的内部设有防滑卡齿。
5.作为本实用新型的进一步改进,所述动力装置是伺服电机、步进电机或者舵机中的一种。
6.作为本实用新型的进一步改进,所述从动臂为自动伸缩结构。
7.作为本实用新型的进一步改进,所述动平台与所述固定座上分别设有极性相异的定位磁石。
8.作为本实用新型的进一步改进,所述取料手指均由三段取料指节活动连接组成,所述防滑卡齿设置在所述取料手指的末端指节的内侧。
9.作为本实用新型的进一步改进,所述固定座的两侧分别设有用于与所述动平台固定的固定销。
10.本实用新型的有益效果是:
11.三轴并联机械手使用三个伺服电机并联,没有误差积累,相比于串联的xyz三轴机械手具有更高的精度;
12.机械手指带有防滑齿,可以在抓取物品的时候提高摩擦力,避免抓取物品打滑掉落,造成生产危险;
13.设备整体可以全自动抓取物品,生产过程效率高、准确性好,降低了人工成本,大大提高企业的经济效益。
附图说明
14.为了易于说明,本实用新型由下述的较佳实施例及附图作以详细描述。
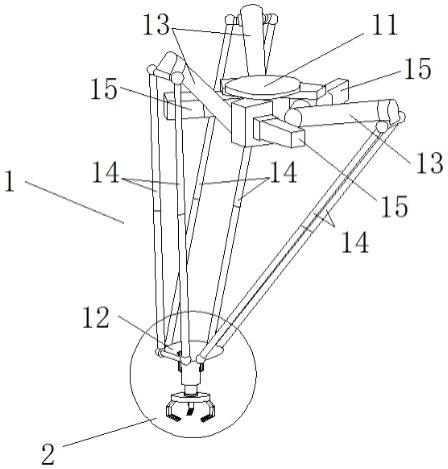
15.图1是带有防滑结构的机械手的整体外观示意图;
16.图2是带有防滑卡齿的抓取结构示意图;
17.图3是抓取结构的内部结构示意图;
18.图中:1-机械手臂、11-定平台、12-动平台、13-主动臂、14-从动臂、15-动力装置、2-抓取结构、21-固定座、22-连接轴、23-控制盘、24-取料手指、25-旋转电机、26-旋转轴、27-防滑卡齿、28-定位磁石、29-固定销。
具体实施方式
19.本实用新型提供一种实施例,对本实用新型所述的一种带有防滑结构的三轴并联机械手作进一步的说明。
20.如图1所示,一种带有防滑结构的三轴并联机械手,包括机械手臂1和抓取结构2,所述抓取结构2可拆卸连接在所述机械手臂1的底部;
21.所述机械手臂1包括定平台11、动平台12、主动臂13、从动臂14和动力装置15;
22.所述动力装置15、所述主动臂13、所述从动臂14的数量均为三个,所述动力装置15、所述主动臂13、所述从动臂14呈中心对称分布;所述定平台11用于承载和固定整个机械手臂1,所述动力装置15固定在所述定平台11底面;所述主动臂13的一端与所述动力装置15转动连接,所述主动臂13可以受所述动力装置15的控制在竖直面上进行转动;所述主动臂13的另一端与所述从动臂14的一端转动连接,所述主动臂13旋转时可以带动所述从动臂14移动;所述从动臂14的下端与所述动平台12转动连接;
23.如图2所示,所述抓取结构2包括固定座21、连接轴22、控制盘23和不少于三个的取料手指24;
24.如图2、3所示,所述固定座21与所述动平台12刚性连接;所述连接轴22与所述固定座21固定连接,所述固定座21内设有旋转电机25,所述连接轴22内部设有旋转轴26,所述控制盘23设置在所述连接轴22的下方,所述旋转电机25通过所述旋转轴26与所述控制盘23连接,所述取料手指24中心对称的分布在所述控制盘23的下方,所述取料手指24的内部设有防滑卡齿27。
25.所述动力装置15是伺服电机、步进电机或者舵机中的一种。
26.所述从动臂14为自动伸缩结构。
27.所述动平台12与所述固定座21上分别设有极性相异的定位磁石28,利用磁石的吸
引力可以在安装过程中迅速、准确的将抓取结构2与机械手臂1相互对准并结合,提高了更换效率
28.所述取料手指24均由三段取料指节活动连接组成,所述防滑卡齿27设置在所述取料手指24的末端指节的内侧。
29.所述固定座21的两侧分别设有用于与所述动平台12固定的固定销29。
30.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种带有防滑结构的三轴并联机械手,其特征在于:包括机械手臂(1)和抓取结构(2),所述抓取结构(2)可拆卸连接在所述机械手臂(1)的底部;所述机械手臂(1)包括定平台(11)、动平台(12)、主动臂(13)、从动臂(14)和动力装置(15);所述动力装置(15)、所述主动臂(13)、所述从动臂(14)的数量均为三个,所述动力装置(15)、所述主动臂(13)、所述从动臂(14)呈中心对称分布;所述定平台(11)用于承载和固定整个机械手臂(1),所述动力装置(15)固定在所述定平台(11)底面;所述主动臂(13)的一端与所述动力装置(15)转动连接,所述主动臂(13)可以受所述动力装置(15)的控制在竖直面上进行转动;所述主动臂(13)的另一端与所述从动臂(14)的一端转动连接,所述主动臂(13)旋转时可以带动所述从动臂(14)移动;所述从动臂(14)的下端与所述动平台(12)转动连接;所述抓取结构(2)包括固定座(21)、连接轴(22)、控制盘(23)和不少于三个的取料手指(24);所述固定座(21)与所述动平台(12)刚性连接;所述连接轴(22)与所述固定座(21)固定连接,所述固定座(21)内设有旋转电机(25),所述连接轴(22)内部设有旋转轴(26),所述控制盘(23)设置在所述连接轴(22)的下方,所述旋转电机(25)通过所述旋转轴(26)与所述控制盘(23)连接,所述取料手指(24)中心对称的分布在所述控制盘(23)的下方,所述取料手指(24)的内部设有防滑卡齿(27)。2.根据权利要求1所述的一种带有防滑结构的三轴并联机械手,其特征在于:所述动力装置(15)是伺服电机、步进电机或者舵机中的一种。3.根据权利要求1所述的一种带有防滑结构的三轴并联机械手,其特征在于:所述从动臂(14)为自动伸缩结构。4.根据权利要求1所述的一种带有防滑结构的三轴并联机械手,其特征在于:所述动平台(12)与所述固定座(21)上分别设有极性相异的定位磁石(28)。5.根据权利要求1所述的一种带有防滑结构的三轴并联机械手,其特征在于:所述取料手指(24)均由三段取料指节活动连接组成,所述防滑卡齿(27)设置在所述取料手指(24)的末端指节的内侧。6.根据权利要求1所述的一种带有防滑结构的三轴并联机械手,其特征在于:所述固定座(21)的两侧分别设有用于与所述动平台(12)固定的固定销(29)。
技术总结
本实用新型一种带有防滑结构的三轴并联机械手,包括位于上方的三轴并联机械手和位于底部的抓取结构,三轴并联机械手具有较高的准确度,抓取结构的取料手指上装有防滑卡齿,可以提高物品抓取、转移过程中的稳定性,本设备精度高、稳定性好,使用防滑结构避免设备转移物料过程中出现物料滑落的生产事故,降低人力成本、提高了企业的生产效率。提高了企业的生产效率。提高了企业的生产效率。
技术研发人员:詹冬芽
受保护的技术使用者:广州速瑞自动化设备有限公司
技术研发日:2021.09.06
技术公布日:2022/1/18
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1