一种多足机器人的可快速拆卸背部承重装置的制作方法
1.本申请涉及机器人背部承重技术领域,尤其涉及一种多足机器人的可快速拆卸背部承重装置。
背景技术:
2.机器人(robot)是一种能够半自主或全自主工作的智能机器。历史上最早的机器人见于隋炀帝命工匠按照柳抃形象所营造的木偶机器人,施有机关,有坐、起、拜、伏等能力。
3.机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围。
4.现有机器人在搬运东西的时候,物件放置在机器人上较为麻烦,而在不搬运物件的时候,放置架又影响机器人的行走,使用较为不便。
技术实现要素:
5.本实用新型的目的在于提供一种多足机器人的可快速拆卸背部承重装置,以解决上述背景技术中提出的问题。
6.本申请实施例采用下述技术方案:
7.一种多足机器人的可快速拆卸背部承重装置,包括设备主体,所述设备主体上活动安装有动力腿,所述设备主体上安装有能够拆卸的承重机构;
8.所述承重机构包括滑轨,所述滑轨上开设有辅助设置组合安装的燕尾槽,所述滑轨上开设的燕尾槽内活动安装有燕尾块,所述燕尾块上固定安装有承重板,所述滑轨的侧壁上螺纹安装有第二螺栓,所述第二螺栓的螺头部分和燕尾块相贴合。
9.优选的,所述设备主体的上表面开设有第二安装槽,所述第二安装槽上开设有与第二安装槽相连通的第一安装槽,且第一安装槽设置在第二安装槽内,所述第一安装槽内卡合安装有安装条,所述安装条上表面固定安装有矩形安装板,所述矩形安装板活动卡合在第二安装槽内,所述第一安装槽内开设有第二螺纹安装槽,所述设备主体上开设有第一螺纹安装槽,所述矩形安装板上螺纹安装有两个第一螺栓,两个所述第一螺栓分别螺纹安装在第一螺纹安装槽和第二螺纹安装槽内。
10.优选的,所述承重板上表面固定安装有等距均匀排列的弹性绳,且弹性绳可以发生形变。
11.本申请实施例采用的上述至少一个技术方案能够达到以下有益效果:
12.其一,本装置通过操控燕尾块在滑轨内的滑动,并对燕尾块进行固定,保证了燕尾块安装在滑轨上的稳定性,且固定效果好,拆装较为方便。
13.其二,弹性绳对物件施加压力,这样在多足机器人移动时,承重板内的物件不会晃动,提高运输物件的稳定性。
附图说明
14.此处所说明的附图用来提供对本申请的进一步理解,构成本申请的一部分,本申请的示意性实施例及其说明用于解释本申请,并不构成对本申请的不当限定。在附图中:
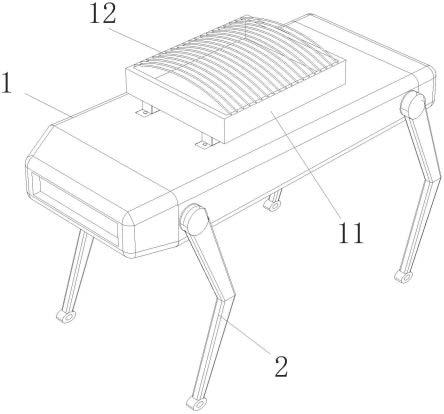
15.图1为本实用新型的正面结构示意图;
16.图2为本实用新型的俯视结构示意图;
17.图3为本实用新型第一安装槽的结构示意图;
18.图4为本实用新型承重机构的结构示意图。
19.图中:1、设备主体;2、动力腿;11、承重板;12、弹性绳;21、第一安装槽;22、第二安装槽;23、第一螺纹安装槽;24、第二螺纹安装槽;31、燕尾块;32、滑轨;33、矩形安装板;34、安装条;35、第一螺栓;36、第二螺栓。
具体实施方式
20.为使本申请的目的、技术方案和优点更加清楚,下面将结合本申请具体实施例及相应的附图对本申请技术方案进行清楚、完整地描述。显然,所描述的实施例仅是本申请一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
21.以下结合附图,详细说明本申请各实施例提供的技术方案。
22.实施例1:请参阅图1、图3和图4,一种多足机器人的可快速拆卸背部承重装置,包括设备主体1,设备主体1上活动安装有动力腿2,设备主体1上安装有能够拆卸的承重机构;
23.承重机构包括滑轨32,滑轨32上开设有辅助设置组合安装的燕尾槽,滑轨32上开设的燕尾槽内活动安装有燕尾块31,燕尾块31上固定安装有承重板11,滑轨32的侧壁上螺纹安装有第二螺栓36,第二螺栓36的螺头部分和燕尾块31相贴合。
24.设备主体1的上表面开设有第二安装槽22,第二安装槽22上开设有与第二安装槽22相连通的第一安装槽21,且第一安装槽21设置在第二安装槽22内,第一安装槽21内卡合安装有安装条34,安装条34上表面固定安装有矩形安装板33,矩形安装板33活动卡合在第二安装槽22内,第一安装槽21内开设有第二螺纹安装槽24,设备主体1上开设有第一螺纹安装槽23,矩形安装板33上螺纹安装有两个第一螺栓35,两个第一螺栓35分别螺纹安装在第一螺纹安装槽23和第二螺纹安装槽24内。
25.在使用时,将安装条34和第一安装槽21的位置对齐,之后向下移动安装条34,让安装条34卡合在第一安装槽21内,而安装条34上面的矩形安装板33也会因为安装条34的向下移动卡合在第二安装槽22内,这样矩形安装板33和安装条34二者均卡合在第一安装槽21和第二安装槽22内,且第一安装槽21和第二安装槽22均为平行水平面的槽,这样矩形安装板33和安装条34也平行水平面,安装更为平稳,之后扭动第一螺栓35,将第一螺栓35以此扭动进入第一螺纹安装槽23和第二螺纹安装槽24内,实现对矩形安装板33的固定,保证安装条34在设备主体1上的固定效果,安装完成后,将燕尾块31和滑轨32的位置对齐,推动燕尾块31,让燕尾块31卡合在滑轨32上安装的燕尾槽内,通过推动承重板11,让燕尾块31完全卡合在滑轨32内,在燕尾块31安装完成后,将第二螺栓36和滑轨32的螺纹孔对齐,扭动第二螺栓36,让第二螺栓36卡合在滑轨32的侧壁上,并让第二螺栓36的栓头对燕尾块31施加压力,实现对燕尾块31的固定,保证燕尾块31在滑轨32内不会发生移动,本装置通过操控燕尾块31
在滑轨32内的滑动,并对燕尾块31进行固定,保证了燕尾块31安装在滑轨32上的稳定性,且固定效果好,拆装较为方便。
26.实施例2:请参阅图1和图2,在实施例一的基础上,承重板11上表面固定安装有等距均匀排列的弹性绳12,且弹性绳12可以发生形变。
27.在使用时,多足机器人使用的时候,拉动弹性绳12,让弹性绳12发生形变,之后将物件放入承重板11内,之后松开弹性绳12,让弹性绳12对物件施加压力,这样在多足机器人移动时,承重板11内的物件不会晃动,提高运输物件的稳定性。
28.以上仅为本申请的实施例而已,并不用于限制本申请。对于本领域技术人员来说,本申请可以有各种更改和变化。凡在本申请的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本申请的权利要求范围之内。
技术特征:
1.一种多足机器人的可快速拆卸背部承重装置,包括设备主体(1),所述设备主体(1)上活动安装有动力腿(2),其特征在于:所述设备主体(1)上安装有能够拆卸的承重机构;所述承重机构包括滑轨(32),所述滑轨(32)上开设有辅助设置组合安装的燕尾槽,所述滑轨(32)上开设的燕尾槽内活动安装有燕尾块(31),所述燕尾块(31)上固定安装有承重板(11),所述滑轨(32)的侧壁上螺纹安装有第二螺栓(36),所述第二螺栓(36)的螺头部分和燕尾块(31)相贴合。2.根据权利要求1所述的一种多足机器人的可快速拆卸背部承重装置,其特征在于:所述设备主体(1)的上表面开设有第二安装槽(22),所述第二安装槽(22)上开设有与第二安装槽(22)相连通的第一安装槽(21),且第一安装槽(21)设置在第二安装槽(22)内。3.根据权利要求2所述的一种多足机器人的可快速拆卸背部承重装置,其特征在于:所述第一安装槽(21)内卡合安装有安装条(34),所述安装条(34)上表面固定安装有矩形安装板(33),所述矩形安装板(33)活动卡合在第二安装槽(22)内。4.根据权利要求3所述的一种多足机器人的可快速拆卸背部承重装置,其特征在于:所述第一安装槽(21)内开设有第二螺纹安装槽(24),所述设备主体(1)上开设有第一螺纹安装槽(23)。5.根据权利要求4所述的一种多足机器人的可快速拆卸背部承重装置,其特征在于:所述矩形安装板(33)上螺纹安装有两个第一螺栓(35),两个所述第一螺栓(35)分别螺纹安装在第一螺纹安装槽(23)和第二螺纹安装槽(24)内。6.根据权利要求1所述的一种多足机器人的可快速拆卸背部承重装置,其特征在于:所述承重板(11)上表面固定安装有等距均匀排列的弹性绳(12),且弹性绳(12)可以发生形变。
技术总结
本实用新型涉及机器人背部承重技术领域,尤其涉及一种多足机器人的可快速拆卸背部承重装置,包括设备主体,所述设备主体上活动安装有动力腿,所述设备主体上安装有能够拆卸的承重机构,所述承重机构包括滑轨,所述滑轨上开设有辅助设置组合安装的燕尾槽,所述滑轨上开设的燕尾槽内活动安装有燕尾块,所述燕尾块上固定安装有承重板,本实用新型扭动第二螺栓36,让第二螺栓36卡合在滑轨32的侧壁上,并让第二螺栓36的栓头对燕尾块31施加压力,实现对燕尾块31的固定,保证燕尾块31在滑轨32内不会发生移动,通过操控燕尾块在滑轨内的滑动,并对燕尾块进行固定,保证了燕尾块安装在滑轨上的稳定性,且固定效果好,拆装较为方便。拆装较为方便。拆装较为方便。
技术研发人员:夏俊
受保护的技术使用者:泰州朵儿智能科技有限公司
技术研发日:2021.12.10
技术公布日:2022/7/8
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1