图像处理装置和机器人控制装置的制作方法
本发明涉及一种图像处理装置和机器人控制装置。
背景技术:
1、以往以来,需要准确地识别放置工件的位置和机器人所把持的工件的偏差,以使用机器人来准确地进行工件的把持(handling)或加工等作业。因此,在近年来,使用视觉传感器来视觉识别工件的位置和工件的偏差(例如参照专利文献1)。
2、现有技术文献
3、专利文献
4、专利文献1:日本特开2013-246149号公报
技术实现思路
1、发明要解决的问题
2、在通过视觉传感器来拍摄出被摄体(例如工件)的图像时,有时在1张图像中无法适当地表现亮度的范围。例如,当按照视野内的亮的区域来调整亮度时,暗的区域变为全黑而无法被视觉确认。反之,当按照视野内的暗的区域来调整亮度时,亮的区域变为全白而无法被视觉确认。
3、为了应对这样的问题,已知有hdr(high dinamic range:高动态范围)合成这一技术。该技术通过将多个拍摄图像合成来生成在1张图像中无法获得的动态范围广的图像。
4、由于拍摄多个拍摄图像花费时间,因此期望拍摄图像的次数少。因此,期望用于决定用于拍摄被摄体的适当的曝光时间的范围和拍摄次数的技术。
5、用于解决问题的方案
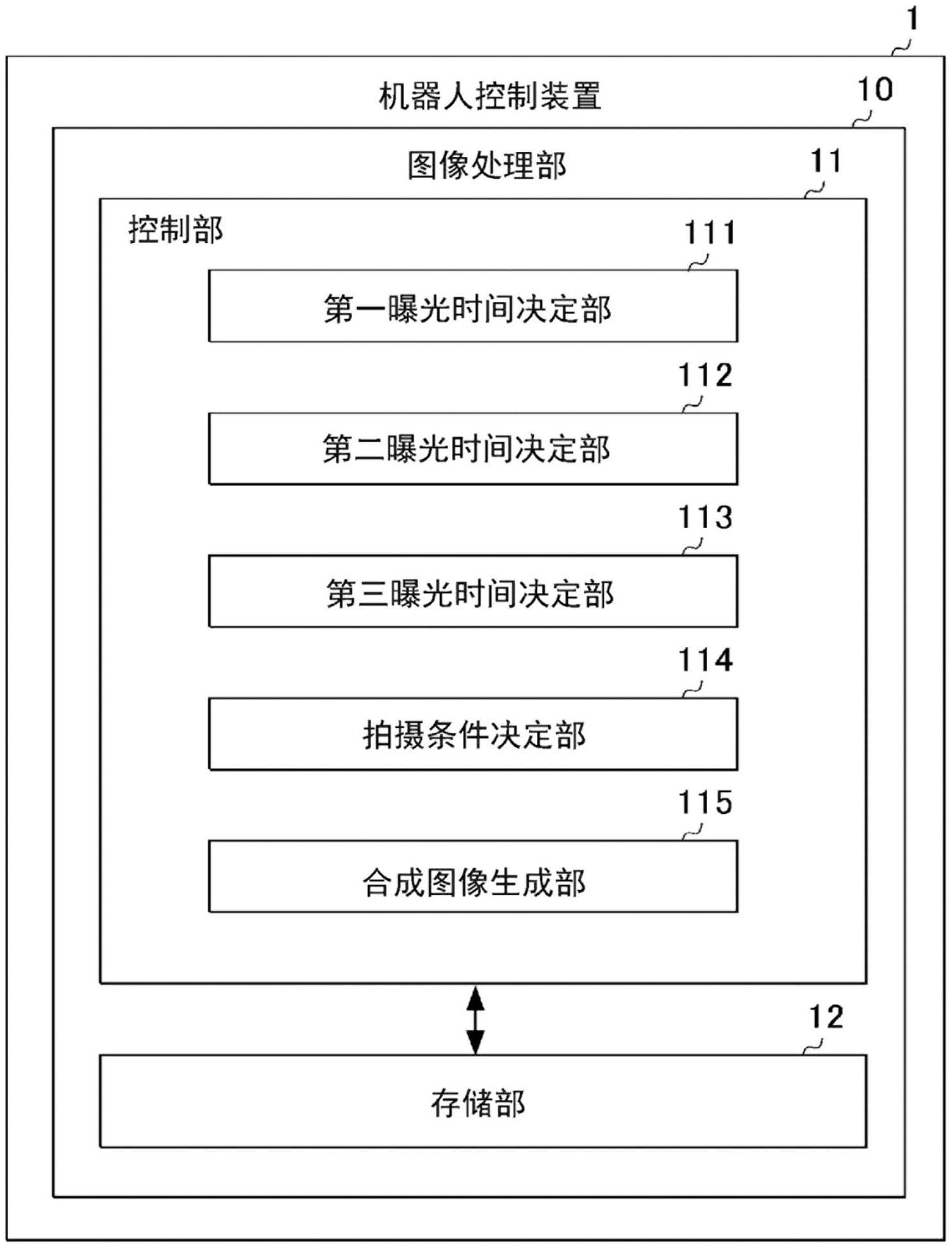
6、本公开所涉及的图像处理装置对拍摄被摄体而得到的拍摄图像进行处理,所述图像处理装置具备:第一曝光时间决定部,其决定用于拍摄所述被摄体的曝光时间的最小值;第二曝光时间决定部,其决定用于拍摄所述被摄体的所述曝光时间的最大值;拍摄条件决定部,其基于包括所决定的所述曝光时间的最小值和所述曝光时间的最大值的曝光时间范围,来决定用于拍摄所述被摄体的所述曝光时间和拍摄所述被摄体的拍摄次数;以及合成图像生成部,其将使用所决定的所述曝光时间和所述拍摄次数来拍摄所述被摄体而得到的多个拍摄图像合成,来生成合成图像。
7、本公开所涉及的机器人控制装置具有对拍摄被摄体而得到的拍摄图像进行处理的图像处理装置,所述机器人控制装置具备:第一曝光时间决定部,其决定用于拍摄所述被摄体的曝光时间的最小值;第二曝光时间决定部,其决定用于拍摄所述被摄体的所述曝光时间的最大值;拍摄条件决定部,其基于包括所决定的所述曝光时间的最小值和所述曝光时间的最大值的曝光时间范围,来决定用于拍摄所述被摄体的所述曝光时间和拍摄所述被摄体的拍摄次数;以及合成图像生成部,其将使用所决定的所述曝光时间和所述拍摄次数来拍摄所述被摄体而得到的多个拍摄图像合成,来生成合成图像。
8、本公开所涉及的图像处理装置对拍摄被摄体而得到的拍摄图像进行处理,所述图像处理装置具备:第一曝光时间决定部,其决定用于拍摄所述被摄体的光学参数的最小值;第二曝光时间决定部,其决定用于拍摄所述被摄体的所述光学参数的最大值;拍摄条件决定部,其基于包括所决定的所述光学参数的最小值和所述光学参数的最大值的光学参数间范围,来决定用于拍摄所述被摄体的所述光学参数和拍摄所述被摄体的拍摄次数;以及合成图像生成部,其将使用所决定的所述光学参数和所述拍摄次数来拍摄所述被摄体而得到的多个拍摄图像合成,来生成合成图像。
9、发明的效果
10、根据本发明,能够决定用于拍摄被摄体的适当的曝光时间的范围和拍摄次数。
技术特征:
1.一种图像处理装置,对拍摄被摄体而得到的拍摄图像进行处理,所述图像处理装置具备:
2.根据权利要求1所述的图像处理装置,其中,
3.根据权利要求1或2所述的图像处理装置,其中,
4.根据权利要求1至3中的任一项所述的图像处理装置,其中,
5.根据权利要求1至4中的任一项所述的图像处理装置,其中,
6.根据权利要求1至4中的任一项所述的图像处理装置,其中,
7.根据权利要求1至5中的任一项所述的图像处理装置,其中,
8.根据权利要求1至6中的任一项所述的图像处理装置,其中,
9.根据权利要求1至7中的任一项所述的图像处理装置,其中,
10.一种机器人控制装置,具有对拍摄被摄体而得到的拍摄图像进行处理的图像处理装置,所述机器人控制装置具备:
11.一种图像处理装置,对拍摄被摄体而得到的拍摄图像进行处理,所述图像处理装置具备:
技术总结
提供一种能够决定用于拍摄被摄体的适当的曝光时间的范围和拍摄次数的图像处理装置和机器人控制装置。对拍摄被摄体而得到的拍摄图像进行处理的图像处理装置具备:第一曝光时间决定部,其决定用于拍摄所述被摄体的曝光时间的最小值;第二曝光时间决定部,其决定用于拍摄所述被摄体的所述曝光时间的最大值;拍摄条件决定部,其基于包括所决定的所述曝光时间的最小值和所述曝光时间的最大值的曝光时间范围,来决定用于拍摄所述被摄体的所述曝光时间和拍摄所述被摄体的拍摄次数;以及合成图像生成部,其将使用所决定的所述曝光时间和所述拍摄次数来拍摄所述被摄体而得到的多个拍摄图像合成,来生成合成图像。
技术研发人员:并木勇太
受保护的技术使用者:发那科株式会社
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!