机器人装置的制作方法
本发明涉及一种机器人装置。
背景技术:
1、对于协作机器人来说,要求机器人在与人或物接触时安全地停止。作为一种检测人或物与机器人的接触的方法,例如,存在在机器人的关节部设置扭矩传感器,感测施加在扭矩传感器的负载的方法。根据该方法,在扭矩传感器的输出值超过了规定的基准值的情况下,能够检测“机器人接触到了人或物”。但是,扭矩传感器对将因人或物接触了机器人而产生的扭矩以及因机器人的动作而产生的扭矩合成的扭矩进行检测,因此,为了使扭矩传感器准确地进行人或物的接触检测,需要从扭矩传感器的检测结果去除因机器人的动作而产生的扭矩。
2、因机器人的动作而产生的扭矩能够根据臂的移动量、臂的重量等计算出来。但是,在具有由固定元件以及多级地组装在固定元件上的多个直动元件构成的臂的直动机构情况下,固定在臂支撑构件的固定元件以及臂的驱动机构所连接的直动元件以外的直动元件会相对于相邻的元件自由移动。因此,存在臂的移动量变化,无法准确地得知因机器人的动作而产生的扭矩的问题。例如,在专利文献1中,公开了一种在高空作业车的伸缩动臂装备有检测伸缩动臂的伸缩长度的伸缩长度检测器的构成。
3、现有技术文献
4、专利文献
5、专利文献1:日本实开昭61-697089号公报
技术实现思路
1、发明要解决的问题
2、在具有由固定元件以及多级地组装在固定元件的多个直动元件构成的臂部的机器人装置中,希望确定固定元件与多个直动元件的各自的相对位置关系。
3、用于解决问题的手段
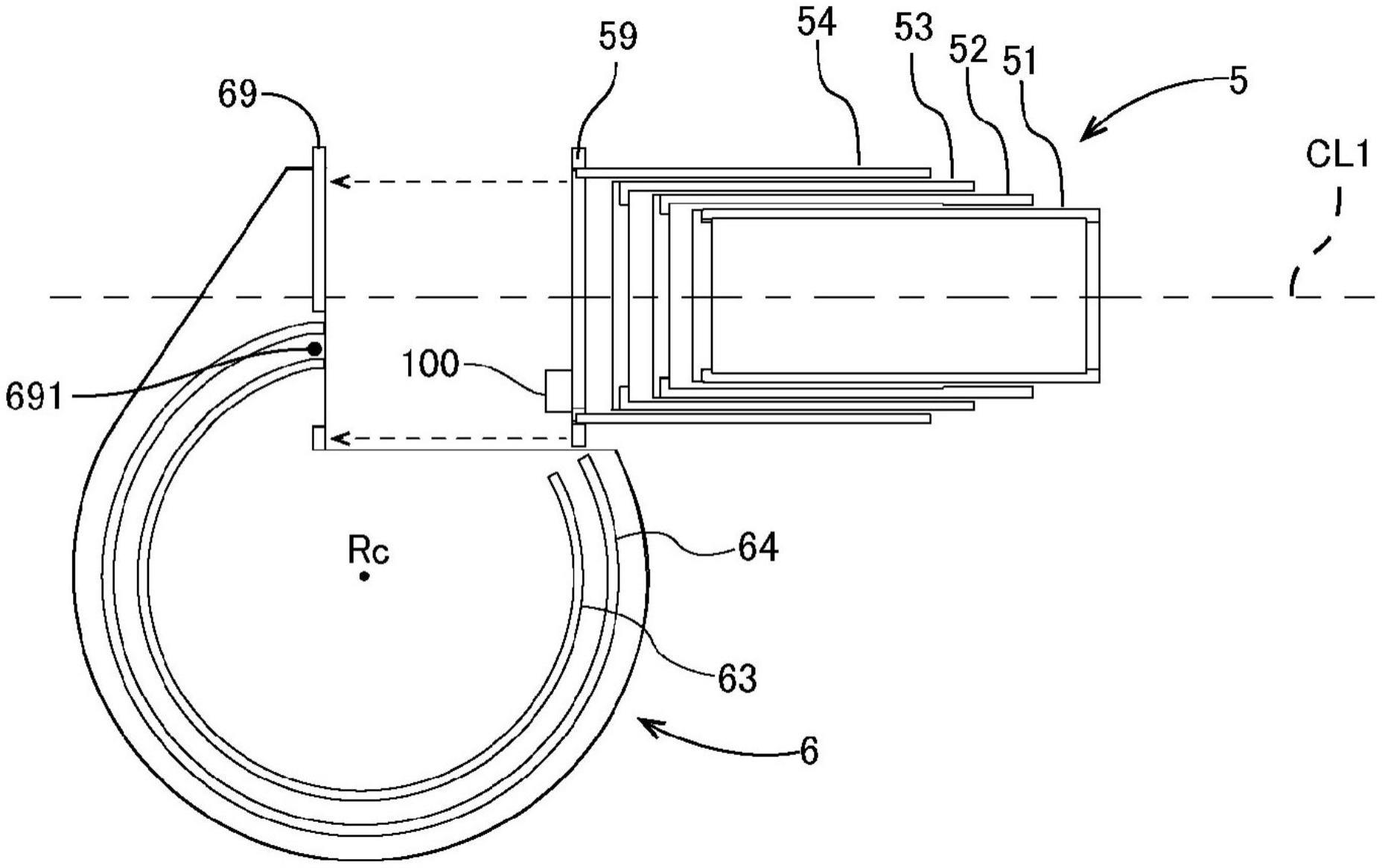
4、本公开的一方式的机器人装置具有:臂部,具有固定元件以及以伸缩自如的方式多级地组装在固定元件的多个直动元件;移动驱动机构,驱动多个直动元件中最前面的直动元件的移动;以及位置确定部,对多个直动元件中除去最前面的直动元件以外的至少一个直动元件相对于固定元件或最前面的直动元件的位置进行确定。
5、发明效果
6、根据一方式,对于具有臂部的机器人装置,臂部包含固定元件以及多级地组装在固定元件的多个直动元件,能够确定直动元件相对于固定元件的位置。
技术特征:
1.一种机器人装置,其中,具有:
2.根据权利要求1所述的机器人装置,其中,所述位置确定部具有传感器,所述传感器检测所述多个直动元件中除去所述最前面的直动元件以外的所有直动元件各自的相对于所述固定元件的距离。
3.根据权利要求2所述的机器人装置,其中,所述传感器安装在所述固定元件或者支撑所述固定元件的支撑构件。
4.根据权利要求1至3中任一项所述的机器人装置,其中,所述机器人装置还具有重心推定处理部,所述重心推定处理部基于所述最前面的直动元件相对于所述固定元件的位置以及确定出的位置的组合,推定所述臂部的重心位置。
5.根据权利要求1至4中任一项所述的机器人装置,其中,所述臂部由组装为多级嵌套结构的多个筒状体构成。
6.根据权利要求1至4中任一项所述的机器人装置,其中,所述臂部由多个线性引导构件以及沿着所述线性引导构件移动的多个移动体构成。
技术总结
本发明的目的在于,在具有臂部的机器人装置中,臂部包含固定元件以及多级地组装在固定元件的多个直动元件,检测各直动元件相对于固定元件的距离。机器人装置(1)具有:臂部(5),具有固定元件(54)以及以伸缩自如的方式多级地组装在固定元件(54)的多个直动元件(51、52、53);移动驱动机构(7、8),驱动多个直动元件(51、52、53)中最前面的直动元件(51)的移动;以及位置确定部,对多个直动元件(51、52、53)中除去最前面的直动元件(51)以外的至少一个直动元件(53)相对于固定元件(54)或最前面的直动元件(51)的位置进行确定。
技术研发人员:大西杜谅,松本邦保
受保护的技术使用者:发那科株式会社
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!