带有外部控制组件的处理系统的制作方法
本发明涉及一种处理系统,其具有承载至少一个处理装置的工业机器人,并具有工业机器人控制器,其中单独的处理装置具有处理工具和带有至少一个计算单元和至少一个无线电模块的电子组件,本发明还涉及一种运行这种处理系统的方法。
背景技术:
1、由de 10 2018 008 648 a1已知一种处理系统,其用于控制处理装置的无线电主控器与工业机器人控制器间隔布置。
技术实现思路
1、本发明的目的在于开发一种具有基本上普遍可用的处理装置的控制装置的处理系统。
2、该目的通过独立权利要求的特征得到了解决。为此,工业机器人控制器通过二进制信号接口与外部控制组件相连以进行双向通信。外部控制组件具有与处理装置的设计成信号和数据接口的形式的双向无线串行接口。处理装置和/或外部控制组件具有至少一个临时数据接口的接口面,其中,至少对于传入的数据而言,数据接口可以相对于信号接口锁定。在处理装置内,计算单元以硬联线的方式与至少一个基于力的传感器系统和/或至少一个基于行程的传感器系统相连。
3、在用于运行处理系统的方法中,当处理装置被定位在预定的空间位置时,工业机器人控制器通过信号接口向外部控制组件传输命令信号。外部控制组件通过信号和数据接口将应用数据从数据存储器传送到处理装置。处理装置借助于控制装置来设置控制路径的至少一个执行器。计算单元将控制路径的一组实际值与预定的额定值域进行比较。如果这些实际值中的每一个都在额定值域内,则无线电模块通过信号和数据接口向外部控制组件传输状态信号。外部控制组件将该状态信号作为许可信号通过信号接口传送给工业机器人控制器。
4、工业机器人控制器和处理装置的外部控制组件是两个控制器,它们通过二进制双向信号接口相互通信。通过这个信号接口,工业机器人控制器只传输命令信号,而外部控制组件只传输处理装置的状态信号。外部控制组件和处理装置具有无线的双向数据和信号接口。一方面,处理装置特定的流程程序的参数和命令通过这个串行信号和数据接口传输。另一方面,过程数据和状态信号从处理装置传输到外部控制组件。临时无线数据接口作为与外部控制组件和/或处理装置的操作者接口。通过这个双向数据接口,流程程序可以被传送到外部控制组件,并且压缩的数据可以从外部控制组件读出。在工业机器人控制器和/或外部控制组件的运行过程中,可以通过操作者接口仅读出数据。在这个时间间隔内,数据到外部控制组件的读入被阻止了。由于二进制信号接口的接口要求低,外部控制组件可以连接到不同制造商的工业机器人控制器。
5、当工业机器人的轴处于静止状态时,外部控制组件和处理装置进行运行。由工业机器人控制器传输的启动信号启动外部控制组件的流程程序。在成功完成该流程程序后,处理装置输出一个状态信号,该状态信号通过外部控制组件作为许可信号传输给工业机器人控制器。在收到许可信号后,工业机器人控制器继续控制工业机器人的轴运动。
技术特征:
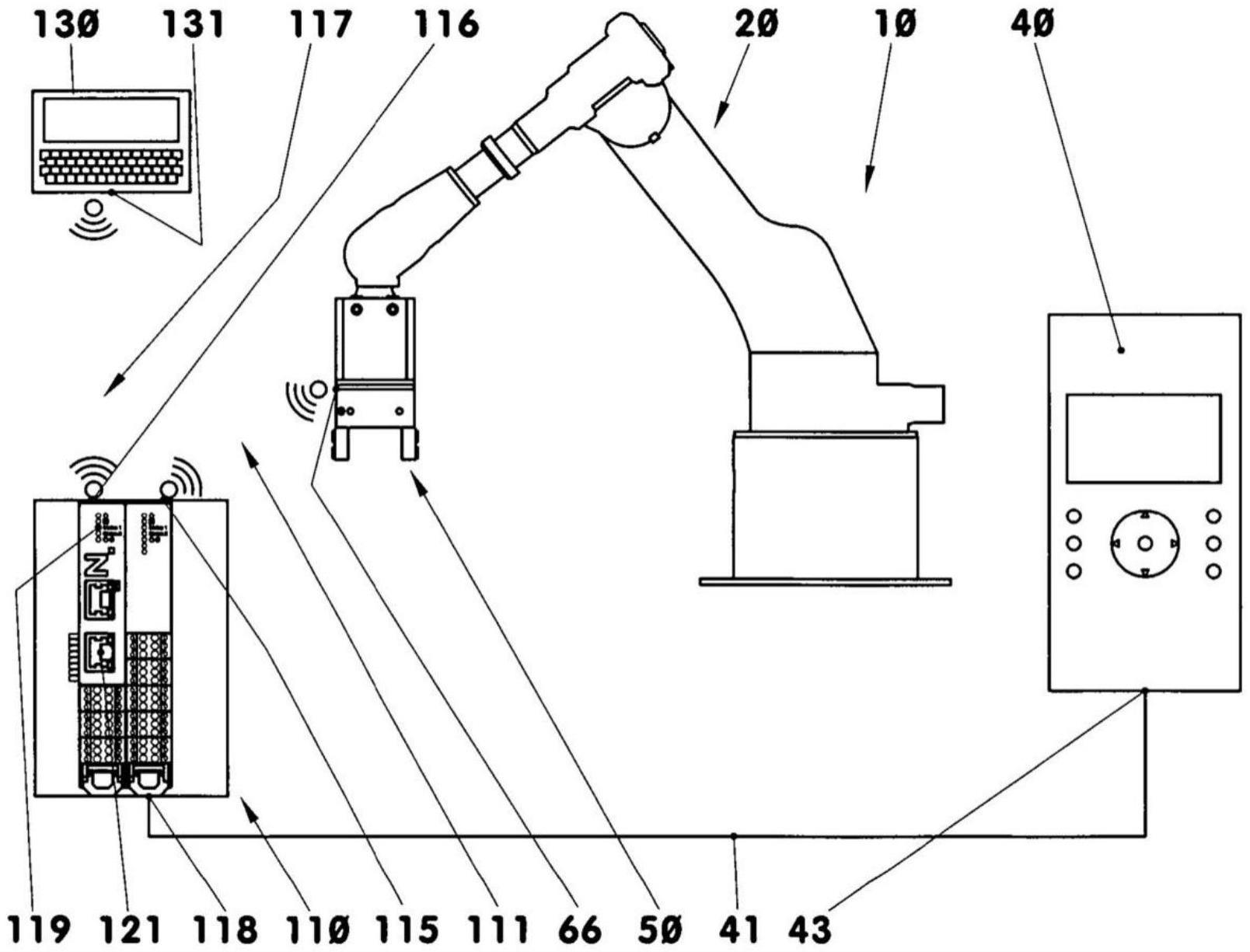
1.处理系统(10),所述处理系统具有承载至少一个处理装置(50)的工业机器人(20),并具有工业机器人控制器(40),其中单独的处理装置(50)具有处理工具(71)和带有至少一个计算单元(63)和至少一个无线电模块(65)的电子组件(61),其特征在于,
2.根据权利要求1所述的处理系统(10),其特征在于,所述处理装置(50)具有至少一个与力相关的传感器系统(73)和至少一个与行程相关的传感器系统(74)。
3.根据权利要求1所述的处理系统(10),其特征在于,电子组件(61)布置在处理装置(50)的壳体(51)中。
4.根据权利要求1所述的处理系统(10),其特征在于,外部控制组件(110)包括数据存储器,用于存储多个处理装置特定的应用流程。
5.根据权利要求4所述的处理系统(10),其特征在于,数据存储器的内容可通过外围设备(130)改变,该外围设备通过临时数据接口(117)向外部控制组件(110)传输数据。
6.用于运行根据权利要求1所述的处理系统(10)的方法,
7.根据权利要求6所述的方法,其特征在于
8.根据权利要求6所述的方法,其特征在于,从工业机器人控制器(40)传输到外部控制组件(110)的所有信号是用于启动应用流程的命令信号。
9.根据权利要求6所述的方法,其特征在于,从外部控制组件(110)传送到工业机器人控制器(40)的所有信号是处理装置(50)的状态信号。
10.根据权利要求6所述的方法,其特征在于,
技术总结
本发明涉及一种处理系统,其具有承载至少一个处理装置的工业机器人,并具有工业机器人控制器,其中单独的处理装置具有处理工具和带有至少一个计算单元和至少一个无线电模块的电子组件,本发明还涉及一种运行这种处理系统的方法。工业机器人控制器通过二进制信号接口与外部控制组件相连,以实现双向通信的目的。外部控制组件具有与处理装置的被设计为信号和数据接口的双向无线串行接口。处理装置和/或外部控制组件具有至少一个临时数据接口的接口面,其中,至少对于传入的数据而言,数据接口可以相对于信号接口锁定。在处理装置内,计算单元以硬联线的方式与至少一个基于力的传感器系统和/或至少一个基于行程的传感器系统相连。凭借本发明,开发了一种具有基本普遍适用的处理装置控制装置的处理系统。
技术研发人员:马丁·齐默尔,京特·齐默尔
受保护的技术使用者:马丁·齐默尔
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!