机器人控制装置的制作方法
本发明涉及机器人控制装置。
背景技术:
1、已知:在具备力传感器的机器人中,基于由力传感器检测的力以及力矩,控制机器人(例如,参照专利文献1。)。
2、现有技术文献
3、专利文献
4、专利文献1:日本特开2014-14902号公报
技术实现思路
1、发明要解决的问题
2、由力传感器检测的力以及力矩,由于由用户安装于机器人的手腕前端的手等工具的刚性以及操纵的工件的重量、工具的姿态等而受到影响。因此,在机器人的出厂阶段中,无法考虑用户所安装的工具的刚性来校准传感器输出,因此,期望在现场中,用户能够简单地校准传感器输出。
3、用于解决问题的方案
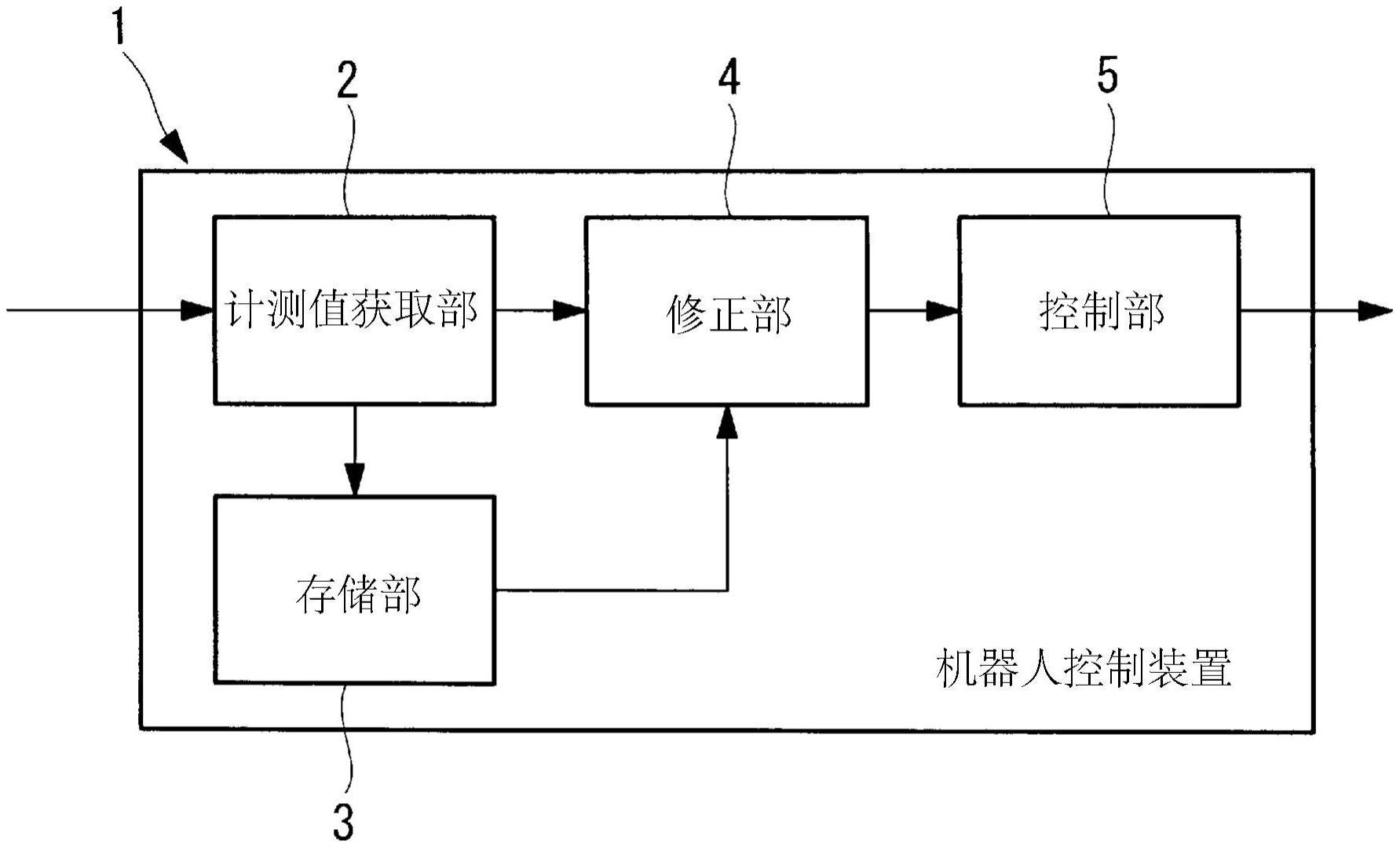
4、本发明的一个方面是一种机器人控制装置,其控制搭载了能够计测力的传感器的机器人,所述机器人控制装置具备:计测值获取部,其获取在所述机器人的手腕前端配置具有已知质量及重心位置的第一工具并使所述手腕进行特定动作时由所述传感器计测的第一计测值、以及配置具有已知质量及重心位置的第二工具并使所述手腕进行所述特定动作时由所述传感器计测的第二计测值;计测值存储部,其存储由该计测值获取部获取的所述第一计测值以及所述第二计测值;以及修正部,其在配置了未知质量的工具时,基于存储于所述计测值存储部的所述第一计测值以及所述第二计测值,修正由所述传感器计测的计测值。
技术特征:
1.一种机器人控制装置,控制搭载了能够计测力的传感器的机器人,其特征在于,
2.根据权利要求1所述的机器人控制装置,其特征在于,
3.根据权利要求1所述的机器人控制装置,其特征在于,
4.根据权利要求1或2所述的机器人控制装置,其特征在于,
技术总结
机器人控制装置(1)控制搭载了能够计测力的传感器的机器人,机器人控制装置(1)具备:计测值获取部(2),其获取在机器人的手腕前端配置具有已知质量及重心位置的第一工具并使手腕进行特定动作时由传感器计测的第一计测值、以及配置具有已知质量及重心位置的第二工具并使手腕进行特定动作时由传感器计测的第二计测值;计测值存储部(3),其存储由计测值获取部(2)获取的第一计测值以及第二计测值;以及修正部(4),其在配置了未知质量的工具时,基于存储于计测值存储部(3)的第一计测值以及第二计测值,修正由传感器计测的计测值。
技术研发人员:若林一贵,顾义华
受保护的技术使用者:发那科株式会社
技术研发日:
技术公布日:2024/1/15
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1