对机器人把持工件的位置以及姿势进行示教的装置、机器人系统以及方法与流程
本公开涉及对机器人把持工件的位置以及姿势进行示教的装置、机器人系统以及方法。
背景技术:
1、已知有一种机器人系统,其根据视觉传感器拍摄到的图像数据,执行使机器人用机械手把持工件的动作(例如,专利文献1)。
2、现有技术文献
3、专利文献
4、专利文献1:日本特开2016-209979号公报
技术实现思路
1、发明要解决的课题
2、以往,要求能够高精度地对使机器人用机械手把持工件的位置进行示教的技术。
3、用于解决课题的手段
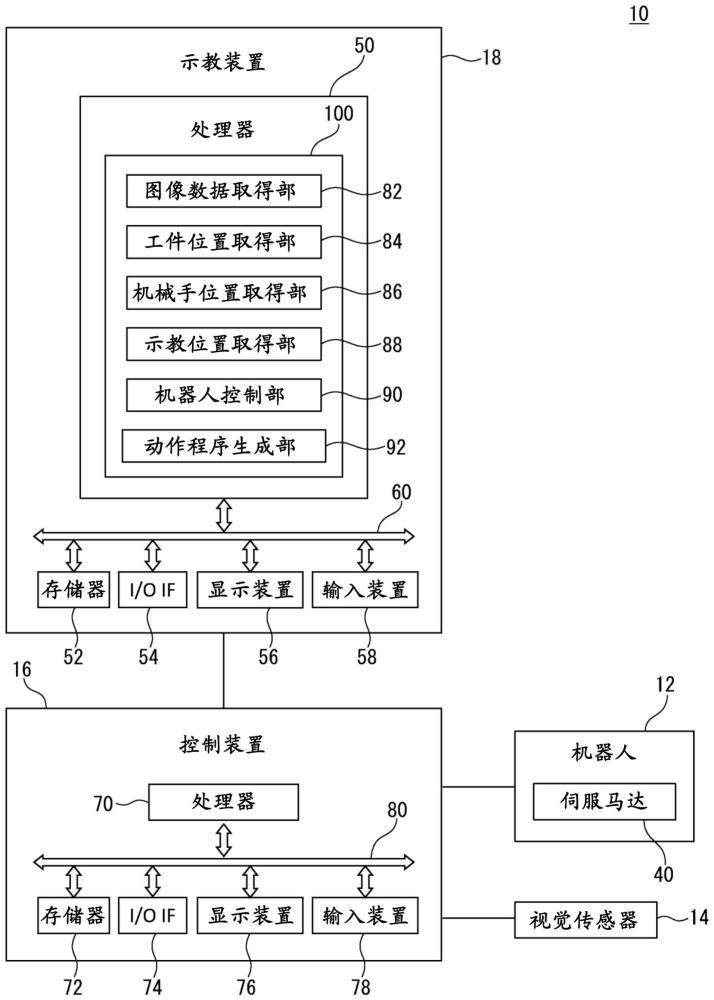
4、本公开的一方式中的一种装置,其在用于控制机器人的控制坐标系中示教该机器人用机械手把持工件的位置以及姿势,其中,所述装置具有:图像数据取得部,其在所述机器人用所述机械手把持所述工件时,取得配置在所述控制坐标系的已知位置的视觉传感器拍摄该工件而得的图像数据;工件位置取得部,其根据所述图像数据取得工件位置数据,该工件位置数据表示在所述视觉传感器拍摄到该图像数据时所述工件在所述控制坐标系中的位置以及姿势;机械手位置取得部,其取得机械手位置数据,该机械手位置数据表示在所述视觉传感器拍摄到所述图像数据时所述机械手在所述控制坐标系中的位置以及姿势;以及示教位置取得部,其根据所述工件位置数据和所述机械手位置数据取得示教位置数据,该示教位置数据表示在所述视觉传感器拍摄到所述图像数据时所述机械手与所述工件在所述控制坐标系中的位置关系。
5、本公开的另一方式中的一种方法,用于在用于控制机器人的控制坐标系中示教该机器人用机械手把持工件的位置以及姿势,其中,处理器在所述机器人用所述机械手把持所述工件时,取得配置在所述控制坐标系的已知位置的视觉传感器拍摄该工件而得的图像数据,处理器根据所述图像数据取得工件位置数据,该工件位置数据表示在所述视觉传感器拍摄到该图像数据时所述工件在所述控制坐标系中的位置以及姿势,处理器取得机械手位置数据,该机械手位置数据表示在所述视觉传感器拍摄到所述图像数据时所述机械手在所述控制坐标系中的位置以及姿势,处理器根据所述工件位置数据和所述机械手位置数据取得示教位置数据,该示教位置数据表示在所述视觉传感器拍摄到所述图像数据时所述机械手与所述工件在所述控制坐标系中的位置关系。
6、发明效果
7、根据在操作员想要示教的把持位置用机械手实际把持工件时拍摄到的图像数据来取得示教位置数据,由此,能够高精度地对机器人示教操作员想要示教的把持位置。
技术特征:
1.一种装置,其在用于控制机器人的控制坐标系中示教该机器人用机械手把持工件的位置以及姿势,其特征在于,所述装置具有:
2.根据权利要求1所述的装置,其特征在于,
3.根据权利要求2所述的装置,其特征在于,
4.根据权利要求3所述的装置,其特征在于,
5.根据权利要求1~4中任一项所述的装置,其特征在于,
6.根据权利要求1~5中任一项所述的装置,其特征在于,
7.根据权利要求1~6中任一项所述的装置,其特征在于,
8.一种机器人系统,其特征在于,具有:
9.根据权利要求8所述的机器人系统,其特征在于,
10.一种方法,用于在用于控制机器人的控制坐标系中示教该机器人用机械手把持工件的位置以及姿势,其特征在于,
技术总结
以往,要求能够高精度地对使机器人用机械手把持工件的位置进行示教的技术。装置(100)具有:图像数据取得部(82),其在机器人(12)用机械手把持工件时,取得配置在控制坐标系的已知位置的视觉传感器(14)拍摄该工件而得的图像数据;工件位置取得部(84),其根据图像数据,取得表示工件的位置以及姿势的工件位置数据;机械手位置取得部(86),其取得表示视觉传感器拍摄到图像数据时的机械手的位置以及姿势的机械手位置数据;示教位置取得部(88),其根据工件位置数据和机械手位置数据,取得表示视觉传感器(14)拍摄到图像数据时的机械手与工件的位置关系的示教位置数据。
技术研发人员:安藤俊之
受保护的技术使用者:发那科株式会社
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!