一种多功能加工中心配套机器人夹具的制作方法
1.本发明属于钢坯物理测试试样自动化加工的技术领域,具体涉及一种多功能加工中心配套机器人夹具。
背景技术:
2.冶炼钢厂在生产钢材时必须对钢材的化学成分和力学性能进行检测,掌握钢材是否符合质量要求。为此需要将钢材的指定部分取下来进行试样加工,并将加工好的试样送去检测。传统的试样加工工艺自动化程度不高,近年来结合机器人实现自动上下料成为一种发展的趋势,但在自动化设计中,单个关节机器人对应的夹具抓取试样种类往往比较单一,如需要抓取多种不同类型试样,则需要通过更换机器人夹爪的方式解决。频繁更换夹爪,会使单位时间内加工的试样数量减少、采购夹爪的成本上升,导致试样加工设备价格过高、设备运行效率降低,影响试样加工的整体效率。
技术实现要素:
3.为解决上述技术问题,本发明提出一种多功能加工中心配套机器人夹具。
4.本发明的目的通过以下技术方案实现:
5.本发明提供了一种多功能加工中心配套机器人夹具,包括系统控制模块、关节机器人和夹具体,所述夹具体上设有两个夹爪和夹爪控制器,所述关节机器人的关节臂末端与夹具体可拆卸的连接,所述系统控制模块与关节机器人及夹爪控制器连接,所述每个夹爪上设有开闭驱动机构,所述夹爪控制器控制开闭驱动机构驱动夹爪的打开或关闭。
6.作为进一步的改进,所述两个夹爪上均设有检测传感器,所述检测传感器与系统控制模块连接。
7.作为进一步的改进,所述开闭驱动机构包括气缸和与气缸连接有压力源,所述夹爪控制器与气缸的电磁阀连接控制压力源的供压。
8.作为进一步的改进,所述关节机器人为六轴机器人,所述六轴机器人的第六轴关节臂末端与所述夹具体连接。
9.作为进一步的改进,所述夹具体上的两个夹爪分别是金相硬度试样抓取夹爪和拉伸弯曲dwtt试样抓取夹爪。
10.作为进一步的改进,所述关节机器人的关节臂末端通过连接法兰与夹具体可拆卸的连接。
11.作为进一步的改进,所述连接法兰包括上法兰和下法兰,所述上法兰和下法兰上设有相适配的螺纹孔,所述上法兰和下法兰内分别置有磁铁。
12.作为进一步的改进,所述夹爪控制器和开闭驱动机构设于所述夹具体内。
13.本发明提供的一种多功能加工中心配套机器人夹具,包括系统控制模块、关节机器人和夹具体,所述夹具体上设有两个夹爪和夹爪控制器,所述关节机器人的关节臂末端与夹具体可拆卸的连接,所述系统控制模块与关节机器人及夹爪控制器连接,所述每个夹
爪上设有开闭驱动机构,所述夹爪控制器控制开闭驱动机构驱动夹爪的打开或关闭。当工序来样后,通过多功能加工中心系统的控制模块向关节机器人发出抓取指令,关节机器人移动至夹具体处与夹具体连接,夹爪控制器控制开闭驱动机构驱动夹爪打开,关节机器人将夹具体上的一个夹爪对准加工好的试样,夹爪控制器控制开闭驱动机构驱动夹爪关闭,随后多功能加工中心系统的控制模块向关节机器人发出旋转抓取指令,夹爪控制器控制开闭驱动机构驱动夹爪打开,关节机器人转动关节臂使夹具体上的另一个夹爪对准加工好的试样,夹爪控制器控制开闭驱动机构驱动夹爪关闭,完成通过一个夹具体上关节机器人一次可抓取两种加工好的试样至下一工序,不但提高了机器人夹具的工作效率,同时缩减了自动化设备的物流时间,提升多功能加工中心的整体工作效率。
附图说明
14.利用附图对本发明作进一步说明,但附图中的实施例不构成对本发明的任何限制,对于本领域的普通技术人员,在不付出创造性劳动的前提下,还可以根据以下附图获得其它的附图。
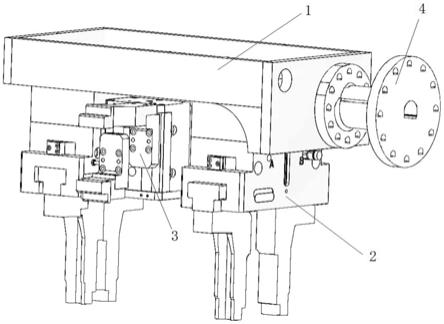
15.图1为本发明的结构示意图。
16.图中:1,夹具体;2,夹爪;3,气缸;4,连接法兰。
具体实施方式
17.为了使本领域的技术人员更好地理解本发明的技术方案,下面结合附图和具体实施例对本发明作进一步详细的描述,需要说明的是,在不冲突的情况下,本申请的实施例及实施例中的特征可以相互组合。
18.结合图1所示,本发明实施例提供一种多功能加工中心配套机器人夹具,包括系统控制模块、关节机器人和夹具体1,本实施例中,关节机器人为六轴机器人,六轴机器人的第一个关节能在水平面自由旋转,后两个关节能在垂直平面移动,同时有一个手臂和两个腕关节,能具有类似人类的手臂和手腕的能力。
19.所述夹具体1上设有两个夹爪2和夹爪控制器。所述夹具体1上的两个夹爪2,一个夹爪是可抓取金相或硬度试样的抓取夹爪;一个夹爪是可抓取拉伸或弯曲或dwtt(落锤撕裂试验)试样的抓取夹爪。所述关节机器人的关节臂末端与夹具体1可拆卸的连接,连接方式可通过连接法兰4将六轴机器人的关节臂末端与夹具体1的连接,为方便自动化生产,所述连接法兰4包括上法兰和下法兰,所述上法兰和下法兰上设有相适配的螺纹孔,所述上法兰和下法兰内分别置有磁铁,在关节机器人接收了多功能加工中心系统的控制模块发出的抓取指令时,更方便关节机器人的关节臂末端与夹具体1的连接。
20.所述系统控制模块与关节机器人及夹爪控制器连接,所述每个夹爪2上设有开闭驱动机构,所述夹爪控制器控制开闭驱动机构驱动夹爪2的打开或关闭。所述开闭驱动机构包括气缸3和与气缸3连接有压力源,所述夹爪控制器与气缸3的电磁阀连接控制压力源的供压。所述夹爪控制器和开闭驱动机构设于所述夹具体1内,可节约空间,且减少信号线及气管的用量。本实施中,为提高夹爪2在抓取试样时的精准率,两个夹爪2上均设有检测传感器,检测传感器可以采用光感传感器或其它可检测夹爪2下是否存在物品的传感器,所述检测传感器与系统控制模块连接。
21.当工序来样后,通过多功能加工中心系统的控制模块向关节机器人发出抓取指令,关节机器人接收多功能加工中心系统的控制模块的抓取指令后,移动至夹具体1处通过连接法兰4与夹具体连接,夹爪控制器控制向开闭驱动机构发送打开信息,开闭驱动机构根据接收的打开信息驱动夹爪2打开,检测传感器将检测到的夹爪2下的是否有试样信息发送给系统控制模块,关节机器人接收系统控制模块发出的夹爪2下没有试样信息时,移动夹爪2位置;关节机器人直至接收系统控制模块发出的夹爪2下有试样信息时,将夹具体1上的一个夹爪2对准加工好的试样,夹爪控制器控制开闭驱动机构驱动夹爪2关闭,随后多功能加工中心系统的控制模块向关节机器人发出旋转抓取指令,夹爪控制器控制开闭驱动机构驱动夹爪2打开,关节机器人转动关节臂使夹具体1上的另一个夹爪2对准加工好的试样,夹爪控制器控制开闭驱动机构驱动夹爪2关闭,完成通过一个夹具体上关节机器人一次可抓取两种加工好的试样至下一工序,不但提高了机器人夹具的工作效率,同时缩减了自动化设备的物流时间,提升多功能加工中心的整体工作效率。
22.上面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的其他方式来实施,因此,不能理解为对本发明保护范围的限制。
23.总之,本发明虽然列举了上述优选实施方式,但是应该说明,虽然本领域的技术人员可以进行各种变化和改型,除非这样的变化和改型偏离了本发明范围,否则都应该包括在本发明的保护范围内。
技术特征:
1.一种多功能加工中心配套机器人夹具,其特征在于,包括系统控制模块、关节机器人和夹具体(1),所述夹具体(1)上设有两个夹爪(2)和夹爪控制器,所述关节机器人的关节臂末端与夹具体(1)可拆卸的连接,所述系统控制模块与关节机器人及夹爪控制器连接,所述每个夹爪(2)上设有开闭驱动机构,所述夹爪控制器控制开闭驱动机构驱动夹爪(2)的打开或关闭。2.如权利要求1所述的一种多功能加工中心配套机器人夹具,其特征在于,所述两个夹爪(2)上均设有检测传感器,所述检测传感器与系统控制模块连接。3.如权利要求1所述的一种多功能加工中心配套机器人夹具,其特征在于,所述开闭驱动机构包括气缸(3)和与气缸(3)连接有压力源,所述夹爪控制器与气缸(3)的电磁阀连接控制压力源的供压。4.如权利要求1所述的一种多功能加工中心配套机器人夹具,其特征在于,所述关节机器人为六轴机器人,所述六轴机器人的第六轴关节臂末端与所述夹具体(1)连接。5.如权利要求1所述的一种多功能加工中心配套机器人夹具,其特征在于,所述夹具体(1)上的两个夹爪(2)分别是金相硬度试样抓取夹爪和拉伸弯曲dwtt试样抓取夹爪。6.如权利要求1所述的一种多功能加工中心配套机器人夹具,其特征在于,所述关节机器人的关节臂末端通过连接法兰(4)与夹具体(1)可拆卸的连接。7.如权利要求6所述的一种多功能加工中心配套机器人夹具,其特征在于,所述连接法兰(4)包括上法兰和下法兰,所述上法兰和下法兰上设有相适配的螺纹孔,所述上法兰和下法兰内分别置有磁铁。8.如权利要求1所述的一种多功能加工中心配套机器人夹具,其特征在于,所述夹爪控制器和开闭驱动机构设于所述夹具体(1)内。
技术总结
本发明公开了一种多功能加工中心配套机器人夹具,包括系统控制模块、关节机器人和夹具体,夹具体上设有两个夹爪和夹爪控制器,关节机器人的关节臂末端与夹具体可拆卸的连接,系统控制模块与关节机器人及夹爪控制器连接,每个夹爪上设有开闭驱动机构,夹爪控制器控制开闭驱动机构驱动夹爪的打开或关闭。通过系统控制模块向关节机器人发出抓取指令,关节机器人与夹具体连接,夹爪控制器控制夹爪打开,关节机器人将夹具体上的一个夹爪对准试样,夹爪控制器控制夹爪关闭,系统控制模块控制关节机器人的关节臂转动使夹具体上另一个夹爪抓取试样后至下一工序,不但提高了机器人夹具的工作效率,同时缩减了自动化设备的物流时间。同时缩减了自动化设备的物流时间。同时缩减了自动化设备的物流时间。
技术研发人员:刘炳奎 彭晓枫 姚筱春 李鑫 翟继龙
受保护的技术使用者:齐齐哈尔华工机床股份有限公司
技术研发日:2022.02.28
技术公布日:2022/5/16
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1