一种基于巡检机器人的设备震动频率采集方法与流程
1.本发明涉及智能机器人领域,具体是一种基于巡检机器人的设备震动频率采集方法。
背景技术:
2.巡检机器人现在是可以替代人进行巡检的高效方式,通过巡检机器人能对特定区域、特定目标进行巡检,及时发现问题并报警。
3.目前巡检机器人大多数只能通过相机进行观察,而无法通过触觉进行监测。
4.因此需要一种通过辅助手段完成巡检机器人进行基于触觉的检测方法。而机械臂、机器视觉以及传感器技术的进步,使机器人的检测手段有了本质的提升。
技术实现要素:
5.针对现有技术存在的问题,本发明提供一种基于巡检机器人的设备震动频率采集方法,使用机器人代替人工进行设备震动频率采集,解决现有机器人无法通过触觉进行监测的问题。
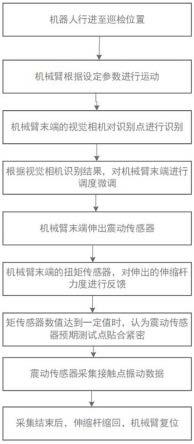
6.为了解决所述技术问题,本发明采用的及技术方案是:一种基于巡检机器人的设备震动频率采集方法,包括以下步骤:s01)、机器人行进至巡检位置,机器人的机械臂根据设定参数进行运动,实现机械臂末端工作范围的初步确定;s02)、在初步确定的工作范围内,机械臂末端搭配的视觉相机对视野范围内的震动检测点进行识别,根据视觉判断结果,反馈机械臂控制系统,进行机械臂位置微调;s03)、微调后,机械臂末端伸出高频震动传感器,紧贴至震动检测点;s04)、机械臂末端的矩阵传感器对伸出的震动传感器贴合力度进行实时测量,当达到设定值时,认为震动传感器与震动检测点的贴合紧密;s05)、震动传感器与震动检测点紧密贴合后,对物体表面震动进行检测,采集检测点的震动数据。
7.进一步的,震动检测点通过标签标定。
8.进一步的,步骤s02)中,机械臂位置微调包括机械臂角度和距离上的调节。
9.本发明的有益效果:本发明综合机器人控制、机械臂运动控制、机器视觉、力矩传感器反馈与机械臂控制、震动传感器反馈,提出一种基于巡检机器人的设备震动频率采集方法,采用机器人 代替人工进行设备震动频率采集,设备震动频率采集是从触觉上对设备的状态监测,从而本发明能解决现有机器人无法通过触觉进行监测的问题。
附图说明
10.图1为本发明的流程图。
具体实施方式
11.下面结合附图和具体实施例对本发明作进一步的说明。
12.实施例1本实施例公开一种基于巡检机器人的设备震动频率采集方法,如图所示,包括以下内容:首先机器人自主行走到特定巡检位置,在特定巡检位置,控制机械臂根据设定参数进行运动,实现机械臂末端工作范围的初步确定。
13.在初步确认的工作范围内,机械臂末端搭配的视觉相机,对视野范围内的标定震动检测点进行识别,检测点使用特定标签标定。根据机器视觉判断结果,反馈机械臂控制系统,进行机械臂角度、距离对应微调。
14.在确认机器臂角度正确后,微调结束。机械臂末端伸出高频震动传感器,与标定的震动检测点接触。根据机械臂具有的扭矩传感器,对伸出的震动传感器贴合力度进行实时测量,当达到特定值时,认为震动传感器与被检测点的贴合紧密。
15.震动传感器与被检测点紧密贴合后,对物体表面震动进行监测,采集检测点的震动数据。
16.本实施例中,视觉相机采用目标识别算法对视野范围内的标定震动检测点进行识别,并与设定的震动检测点的标准位置进行对比,得到识别位置与标准位置之间的差别,此差别就是机器视觉判断结果,机器视觉判断结果反馈给机械臂控制系统,机械臂控制系统根据识别位置与标准位置之间的差别进行机械臂角度、距离对应微调。
17.以上描述的仅是本发明的基本原理和优选实施例,本领域技术人员根据本发明做出的改进和替换,属于本发明的保护范围。
技术特征:
1.一种基于巡检机器人的设备震动频率采集方法,其特征在于:包括以下步骤:s01)、机器人行进至巡检位置,机器人的机械臂根据设定参数进行运动,实现机械臂末端工作范围的初步确定;s02)、在初步确定的工作范围内,机械臂末端搭配的视觉相机对视野范围内的震动检测点进行识别,根据视觉判断结果,反馈机械臂控制系统,进行机械臂位置微调;s03)、微调后,机械臂末端伸出高频震动传感器,紧贴至震动检测点;s04)、机械臂末端的矩阵传感器对伸出的震动传感器贴合力度进行实时测量,当达到设定值时,认为震动传感器与震动检测点的贴合紧密;s05)、震动传感器与震动检测点紧密贴合后,对物体表面震动进行检测,采集检测点的震动数据。2.根据权利要求1所述的基于巡检机器人的设备震动频率采集方法,其特征在于:震动检测点通过标签标定。3.根据权利要求1所述的基于巡检机器人的设备震动频率采集方法,其特征在于:步骤s02)中,机械臂位置微调包括机械臂角度和距离上的调节。
技术总结
本发明综合机器人控制、机械臂运动控制、机器视觉、力矩传感器反馈与机械臂控制、震动传感器反馈,提出一种基于巡检机器人的设备震动频率采集方法,采用机器人代替人工进行设备震动频率采集,设备震动频率采集是从触觉上对设备的状态监测,从而本发明能解决现有机器人无法通过触觉进行监测的问题。无法通过触觉进行监测的问题。无法通过触觉进行监测的问题。
技术研发人员:谭强 王建华 姜荣 闫盼盼
受保护的技术使用者:山东新一代信息产业技术研究院有限公司
技术研发日:2022.04.15
技术公布日:2022/7/4
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1