一种带有缓冲结构的机械手抓料结构的制作方法
本发明涉及机械手领域,尤其是涉及抓料结构领域,具体为一种带有缓冲结构的机械手抓料结构。
背景技术:
1、缓冲结构被使用于机械手抓料结构中,在抓料机构中被广泛利用。在使用过程中,机械手可以根据编程控制移动到制定的地方对料片进行抓取,然后,在实际应用中,往往由于料片存在位置的偏移,加之机械手自身存在的圆周方向的偏移,导致夹具存在困难,以至于,对机械手的夹爪产生碰撞,进而导致寿命也随之降低,不仅效率不高,成本反而增加,不适用于高速运作的机械自动化生产中。
技术实现思路
1、鉴于以上所述现有技术的缺点,本发明的目的在于提供一种带有缓冲结构的机械手抓料结构,用于解决现有技术的难点。
2、为实现上述目的及其他相关目的,本发明提供一种带有缓冲结构的机械手抓料结构,包括:
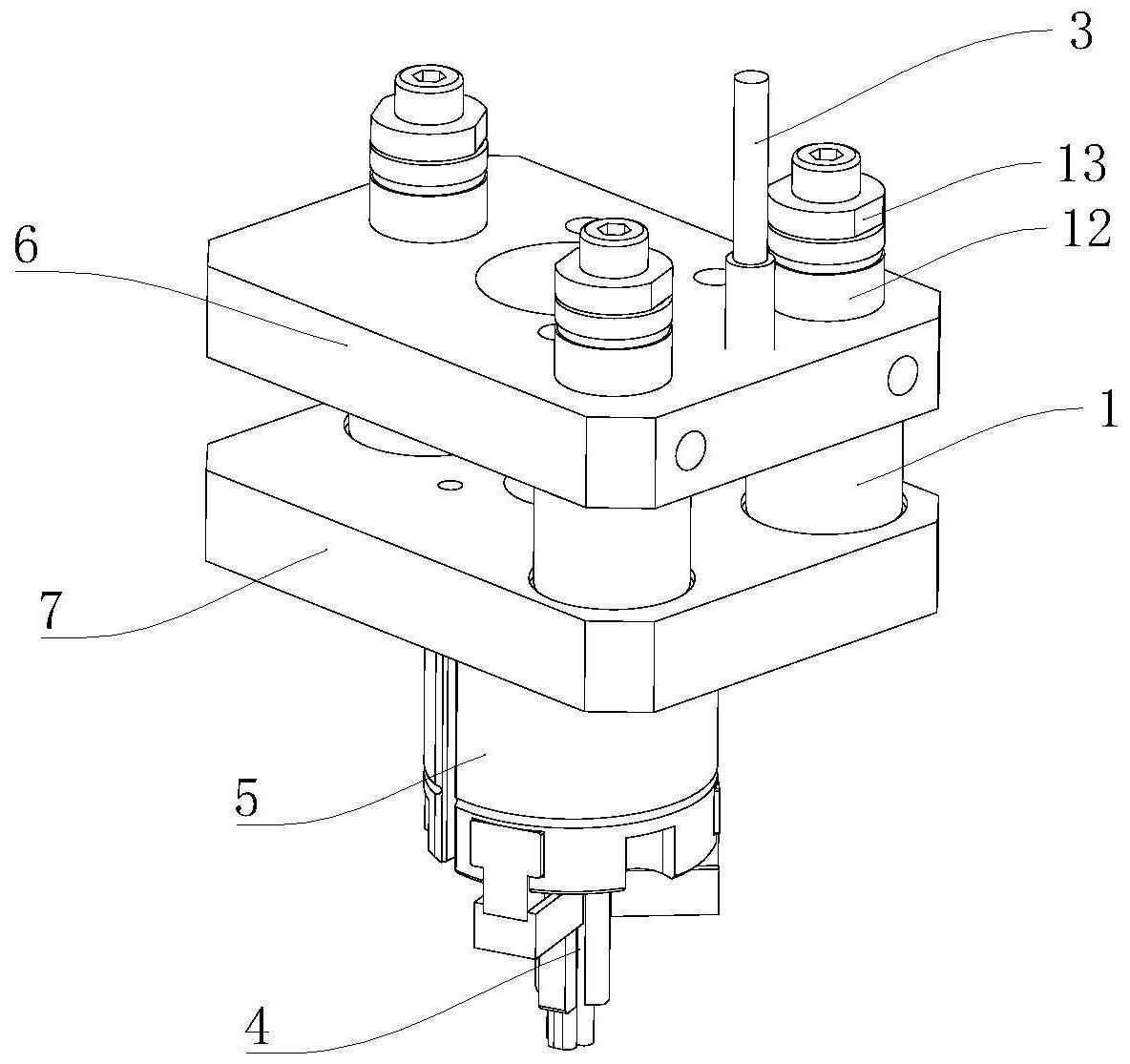
3、轴承固定组件,所述轴承固定组件,所述轴承固定组件安装在机械手本体上并随着机械手本体的驱动下上左右旋转移动;
4、直线轴承单元,所述直线轴承单元竖直安装在轴承固定组件上,带动轴承固定组件底部安装的夹爪4通过直线轴承单元上下移动,所述直线轴承单元设置有三组;
5、弹簧1,所述弹簧1安装在上轴承固定块6和下轴承固定块7之间,并位于直线轴承单元的底部,其中直线轴承单元的导柱2穿过弹簧1;
6、接近传感器3,所述接近传感器3安装在轴承固定组件上,通过底部感应固定板设置;
7、夹爪4,所述夹爪4通过夹爪气缸5安装在轴承固定组件的底部。
8、根据优选方案,轴承固定组件包括:
9、上轴承固定块6,所述上轴承固定块6的顶部通过连接单元与机械手本体连接;
10、下轴承固定块7,所述下轴承固定块7平行设置在上轴承固定块6的下方。
11、根据优选方案,弹簧1的顶部和底部分别与上轴承固定块6和下轴承固定块7连接。
12、根据优选方案,上轴承固定块6和下轴承固定块7的四周均设置有倒角。
13、根据优选方案,上轴承固定块6和下轴承固定块7的周向设置有安装夹爪气缸5连接件接头的避让槽8。
14、根据优选方案,上轴承固定块6上设置有三个用于安装直线轴承单元的安装通孔9,所述下轴承固定块7上设置有三个用于安装弹簧1的的安装凹槽10,所述安装通孔9的底部对应弹簧1的顶部设置有环形槽11。
15、根据优选方案,安装通孔9和安装凹槽10同轴设置。
16、根据优选方案,夹爪气缸5中心与机械手旋转中心同心设置。
17、根据优选方案,直线轴承单元包括:
18、导柱2,所述导柱2从直线轴承12内插入至安装在下轴承固定块7的凹槽10上;
19、直线轴承12,所述直线轴承12固定在上轴承固定块6上,通过侧边的紧固螺丝固定。
20、根据优选方案,导柱2的顶部通过垫块13安装有固定螺栓14将导柱2安装在直线轴承12内。
21、根据优选方案,接近传感器3设置在上轴承固定块6的安装孔内。
22、根据优选方案,连接单元包括:
23、导杆15,所述导杆15从上至下依次穿过机械臂和夹块16,与上轴承固定块6固定;
24、夹块16,所述夹块16安装在上轴承固定块6上表面并套设在导杆15上,所述夹块16通过螺栓夹紧导杆15使之能够上下移动。
25、本发明包括以下有益效果:
26、(1)采用直线轴承单元和弹簧,在抓料过程中,给抓料提供一个上下方向的缓冲力,抵消料片位置偏移而导致高度方向的碰撞,起到保护机械手和机构部件的作用;
27、(2)采用三组直线轴承单元,有效消除了夹爪在抓取时圆周方向的偏移,保证了上下位置抓取产品的稳定性;
28、(3)接近传感器,当发生机械硬碰撞时弹簧被压缩,接近传感器感应信号,快速响应信息,提示机械手抓取碰撞异常现象。
29、下文中将结合附图对实施本发明的最优实施例进行更详尽的描述,以便能容易地理解本发明的特征和优点。
技术特征:
1.一种带有缓冲结构的机械手抓料结构,其特征在于,包括:
2.根据权利要求1所述的带有缓冲结构的机械手抓料结构,其特征在于,所述轴承固定组件包括:
3.根据权利要求2所述的带有缓冲结构的机械手抓料结构,其特征在于,所述上轴承固定块(6)上设置有三个用于安装直线轴承单元的安装通孔(9),所述下轴承固定块(7)上设置有三个用于安装弹簧(1)的安装凹槽(10),所述安装通孔(9)的底部对应弹簧(1)的顶部设置有环形槽(11)。
4.根据权利要求3所述的带有缓冲结构的机械手抓料结构,其特征在于,夹爪气缸(5)中心与机械手旋转中心同心设置。
5.根据权利要求4所述的带有缓冲结构的机械手抓料结构,其特征在于,所述直线轴承单元包括:
6.根据权利要求5所述的带有缓冲结构的机械手抓料结构,其特征在于,所述导柱(2)的顶部通过垫块(13)安装有固定螺栓(14)将导柱(2)安装在直线轴承(12)内。
7.根据权利要求6所述的带有缓冲结构的机械手抓料结构,其特征在于,所述接近传感器(3)设置在上轴承固定块(6)的安装孔内。
技术总结
本发明提供一种带有缓冲结构的机械手抓料结构,包括轴承固定组件安装在机械手本体上并随着机械手本体的驱动下上左右旋转移动;直线轴承单元竖直安装在轴承固定组件上,带动轴承固定组件底部安装的夹爪通过直线轴承单元上下移动,直线轴承单元设置有三组;弹簧安装在轴承固定组件之间,并位于直线轴承单元的底部;接近传感器安装在轴承固定组件上,通过底部感应固定板设置;夹爪通过夹爪气缸安装在轴承固定组件的底部。本发明采用直线轴承单元和弹簧给抓料提供上下的缓冲力,抵消料片位置偏移而导致高度方向的碰撞,起到保护机械手和机构部件的作用;采用三组直线轴承单元,消除圆周方向偏移;接近传感器,当发生机械硬碰撞时弹簧被压缩,实现快速响应。
技术研发人员:徐尚华
受保护的技术使用者:无锡科里斯特科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!