一种基于视觉的机械臂气排球陪练方法及系统与流程
本发明涉及体育辅助训练,具体涉及一种基于视觉的机械臂气排球陪练方法及系统。
背景技术:
1、气排球运动是一项集运动、休闲、娱乐为一体的群众性体育项目,其打法和记分方法与竞技排球基本相同,作为一项新的体育运动项目,如今已经受到越来越多人的喜爱。气排球由软塑料制成,比赛用球重约120克,比普通硬式排球轻100-150克,圆周74-76厘米,比普通硬式排球圆周长15-18厘米。
2、为降低气排球运动的入门门槛,提高气排球训练过程中的训练效率,越来越多机械化设备被投入使用。现有机械化气排球陪练技术通常采用:(1)用高速发球机将球射出,运动员练习对高强度来球的防守动作;(2)用抛球机器将球或高或低抛出,运动员针对来球进行“捧、托、传、扣”等基础动作练习。另外,和硬式排球陪练技术类似,还采用有:(1)利用带有滑轨的阻挡装置模拟敌方拦网,训练运动员的进攻技巧;(2)利用带排球收集装置和抛投装置的小车,实现运动员传垫球的陪练。
3、目前,针对气排球的陪练技术仍有不足。首先,高速发球机使用前提是有足够多的训练用球,且运动员的防守技巧已超过入门水平;其次,抛球机同样要求训练用球足够多,才能达到一定的训练效率,且运动员只有单次触球机会,无法模拟真人陪练中的来球回合;再者,阻挡装置模拟敌方拦网的方案仅能训练扣球,也不适合新手。因此,现有的这些机械化气排球陪练方案均无法满足初学者需求。
技术实现思路
1、本发明为解决现有技术中气排球陪练方案存在用球数量多、无法模拟真人陪练中的来球回合的技术问题,提出了一种基于视觉的机械臂气排球陪练方法,仅用一两颗气排球便可实现和运动员之间连续来球回合的高效训练,解决了新手找不到陪练难上手的问题。
2、本发明的技术方案:
3、一种基于视觉的机械臂气排球陪练方法,包括以下步骤:
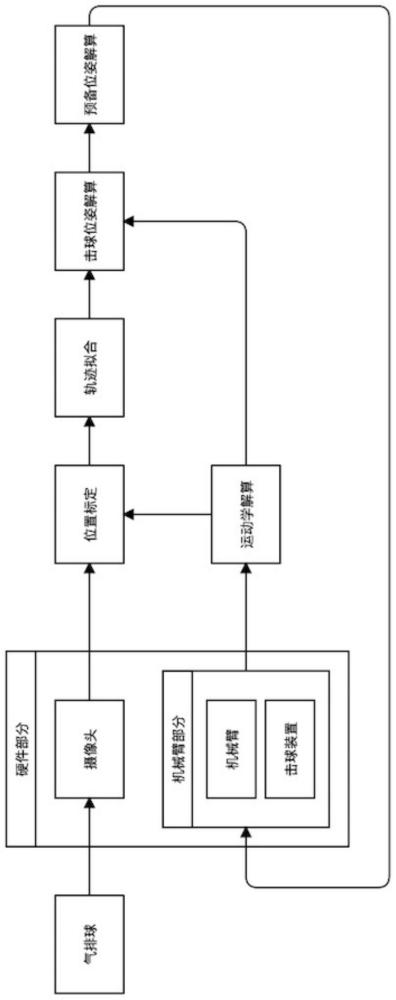
4、通过视觉模块识别气排球的空间位置信息,实时计算气排球的运动轨迹和速度;
5、计算气排球的运动轨迹和机械臂工作空间的交点,并计算击球位姿以及对应的预备位姿,机械臂从预备位姿运动至击球位姿时正好触球,触球后气排球按原轨迹返回运动员的击球点。
6、进一步地,所述陪练方法还包括视觉模块位置标定,求出视觉模块坐标系和机械臂基坐标系的转换关系,以将所有坐标统一至机械臂基坐标系下。
7、进一步地,视觉模块位置标定包括以下步骤:
8、在机械臂末端设置标定标志物;
9、随机改变机械臂的位姿,通过视觉模块识别并记录标定标志物在视觉模块坐标系中的位姿,同时解算并记录标定标志物在机械臂基坐标系中的位姿,形成一组独立数据;
10、重复前述步骤若干次,得到若干组独立数据;
11、通过最小二乘拟合得到视觉模块坐标系和机械臂基坐标系的转换关系:ax=y,式中,x为标定标志物在视觉模块坐标系中的坐标,y为标定标志物在机械臂基坐标系中的坐标,a为从视觉模块坐标系到机械臂基坐标系的变换矩阵。
12、进一步地,通过视觉模块识别气排球的空间位置信息,实时计算气排球的运动轨迹和速度,具体包括:
13、视觉模块实时跟踪并记录气排球位置坐标,当气排球在空间中折返时,视为机械臂即将需要击球;
14、对气排球进行间隔0.1s的坐标分析,并实时进行轨迹运算,对多次运算结果进行最小二乘拟合,得到越来越精确的气排球运动轨迹,所述运动轨迹为上凸的二次函数。
15、进一步地,计算气排球的运动轨迹和机械臂工作空间的交点,并计算击球位姿以及对应的预备位姿,具体包括:
16、初步计算出气排球的运动轨迹后,实时判断气排球的运动轨迹与机械臂的工作空间是否有交点,如有交点则判断为可以击球,随着运动轨迹的不断精确实时更新记录交点位置,最终的交点位置即为击球位置;
17、计算气排球在击球位置的速度向量,记录其方向和大小,其中,方向用来计算击球姿态和预备姿态,击球姿态为使机械臂末端击球装置垂直于在击球位置来球的速度方向的机械臂姿态,预备姿态为使机械臂末端击球装置从预备位置沿在击球位置来球的速度方向直线运动至击球位置的机械臂姿态;大小用来计算预备位置,机械臂提前运行至预备位置,再在运行至击球位置时积累足够击球速度,以使气排球按原轨迹返回至运动员的击球点。
18、进一步地,当机械臂在奇异点附近运动或者气排球的运动轨迹和机械臂工作空间没有交点时,机械臂停止运行并进入零力保护模式。
19、进一步地,所述视觉模块为深度摄像头,所述机械臂为六自由度协作机械臂。
20、进一步地,所述陪练方法还适用于硬式排球。
21、本发明的另一方面,提供一种基于视觉的机械臂气排球陪练系统,包括:
22、视觉模块,所述视觉模块用于识别气排球的空间位置信息;
23、计算模块,所述计算模块用于实时计算气排球的运动轨迹和速度,并计算气排球的运动轨迹和机械臂工作空间的交点,同时计算击球位姿以及对应的预备位姿;
24、机械臂,所述机械臂从预备位姿运动至击球位姿时正好触球,触球后气排球按原轨迹返回运动员的击球点。
25、进一步地,所述机械臂的末端设有击球装置,所述击球装置为碟状塑料材质,所述击球装置的直径为气排球直径的1.5倍,所述击球装置的击球面向内凹陷。
26、采用上述技术方案后,本发明与现有技术相比,具有以下有益效果:本发明通过视觉模块识别气排球的空间位置信息,并实时计算预测气排球的运动轨迹和速度,通过机械臂在其工作空间内进行击球,使得气排球按原轨迹返回至运动员的击球点,和现有技术相比,本发明的陪练方法更加灵活,仅需使用一两颗气排球即可实现和运动员之间连续来球回合的高效训练场景,并且解决了新手找不到陪练难上手、没有大型训练场地和很多数量的训练用球、难以组织机械化训练等痛点。
技术特征:
1.一种基于视觉的机械臂气排球陪练方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于视觉的机械臂气排球陪练方法,其特征在于,所述陪练方法还包括视觉模块位置标定,求出视觉模块坐标系和机械臂基坐标系的转换关系,以将所有坐标统一至机械臂基坐标系下。
3.根据权利要求2所述的基于视觉的机械臂气排球陪练方法,其特征在于,视觉模块位置标定包括以下步骤:
4.根据权利要求1所述的基于视觉的机械臂气排球陪练方法,其特征在于,通过视觉模块识别气排球的空间位置信息,实时计算气排球的运动轨迹和速度,具体包括:
5.根据权利要求1所述的基于视觉的机械臂气排球陪练方法,其特征在于,计算气排球的运动轨迹和机械臂工作空间的交点,并计算击球位姿以及对应的预备位姿,具体包括:
6.根据权利要求1所述的基于视觉的机械臂气排球陪练方法,其特征在于,当机械臂在奇异点附近运动或者气排球的运动轨迹和机械臂工作空间没有交点时,机械臂停止运行并进入零力保护模式。
7.根据权利要求1所述的基于视觉的机械臂气排球陪练方法,其特征在于,所述视觉模块为深度摄像头,所述机械臂为六自由度协作机械臂。
8.根据权利要求1-7任意一项所述的基于视觉的机械臂气排球陪练方法,其特征在于,所述陪练方法还适用于硬式排球。
9.一种基于视觉的机械臂气排球陪练系统,其特征在于,包括:
10.根据权利要求9所述的一种基于视觉的机械臂气排球陪练系统,其特征在于,所述机械臂的末端设有击球装置,所述击球装置为碟状塑料材质,所述击球装置的直径为气排球直径的1.5倍,所述击球装置的击球面向内凹陷。
技术总结
本发明涉及体育辅助训练技术领域,具体涉及一种基于视觉的机械臂气排球陪练方法及系统,该陪练方法包括以下步骤:通过视觉模块识别气排球的空间位置信息,实时计算气排球的运动轨迹和速度;计算气排球的运动轨迹和机械臂工作空间的交点,并计算击球位姿以及对应的预备位姿,机械臂从预备位姿运动至击球位姿时正好触球,触球后气排球按原轨迹返回运动员的击球点。本发明提供的一种基于视觉的机械臂气排球陪练方法,仅用一两颗气排球便可实现和运动员之间连续来球回合的高效训练,解决了新手找不到陪练难上手、没有大型训练场地和很多数量的训练用球、难以组织机械化训练等问题。
技术研发人员:酆禾阳,范宏杰,解书航,陈泽天,梁秋实,卢曾辉,徐东,魏洪兴,宋仲康,张世亮
受保护的技术使用者:遨博(北京)智能科技股份有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!