机器人、机器人的颈部结构及其运动控制方法与流程
本发明属于机器人,具体涉及机器人、机器人的颈部结构及其运动控制方法。
背景技术:
1、随着科技的不断发展,智能机器人逐渐走入人们的生活。在实际应用中,智能机器人既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。这类机器人可用在室内或室外,可用于工业或家庭,可用于取代保安巡视、取代人们清洁地面,还可用于家庭陪伴、辅助办公等。但是,传统的机器人通常只有腿部自由度,没有头部或者只有固定的头部结构,仿生程度低。
技术实现思路
1、因此,本发明所要解决的技术问题是如何设置机器人的头部自由度以提高机器人的仿生程度。
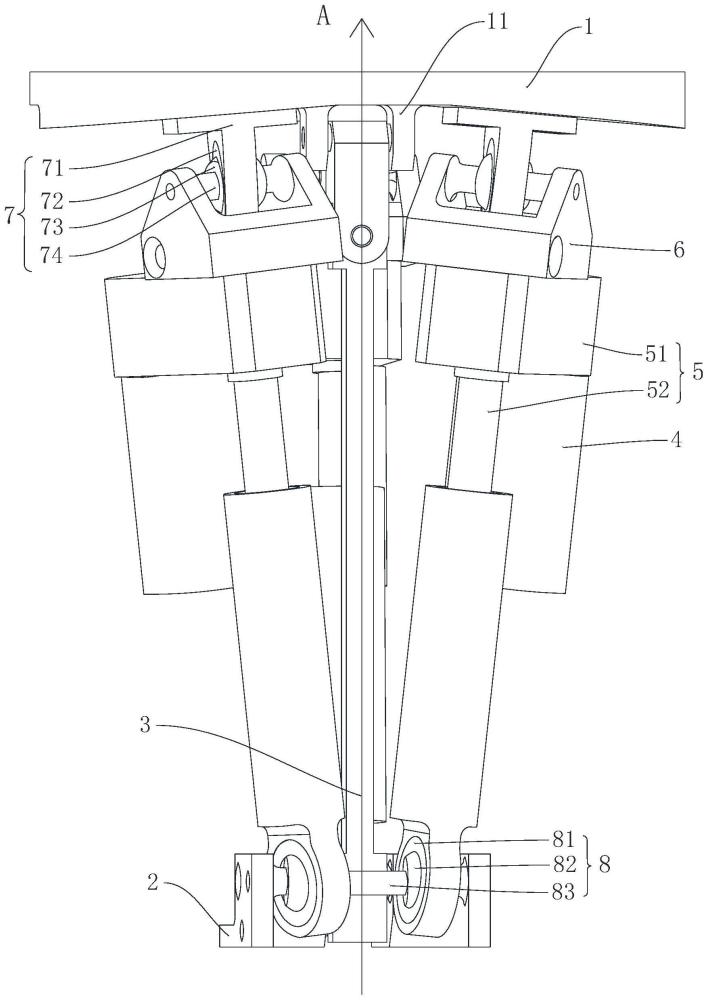
2、为解决上述技术问题,本发明提供机器人的颈部结构,连接于机器人的头部和身体之间,包括:
3、底座,用于连接机器人的身体;
4、顶座,用于连接机器人的头部;
5、连杆单元,转动连接于所述底座和顶座之间;
6、驱动单元,输出驱动力;及
7、传动机构,设置在所述底座和顶座之间,所述传动机构将所述驱动单元的驱动力传递至所述底座和/或顶座以驱动所述头部旋转、俯仰、外伸;
8、其中,所述驱动单元和传动机构为呈一对一设置的三个,每个所述传动机构包括第一传动单元和第二传动单元,所述第一传动单元将驱动单元的驱动力传递至第二传动单元,以使所述第二传动单元伸缩,所述驱动单元位于所述第二传动单元的外侧。
9、优选地,上述驱动单元的轴线与所述第二传动单元的轴线平行或大致平行。
10、优选地,上述顶座与所述第一传动单元之间设置有第一铰接机构,所述底座与所述第二传动单元连接。
11、优选地,上述驱动单元与所述第二传动单元位于第一传动单元的下方。
12、优选地,上述底座与所述第二传动单元通过第二铰接机构连接。
13、优选地,上述第一铰接机构到所述顶座的中心的距离大于所述第二铰接机构到所述底座的中心的距离。
14、优选地,上述连杆单元包括第一连杆和第二连杆,所述第一连杆和所述顶座、所述第二连杆和所述底座及所述第一连杆和所述第二连杆之间均设置有转动连接件。
15、优选地,上述连杆单元的轴线与所述底座和顶座的中心点连线共线。
16、本发明还提供应用在如上述任一项所述的机器人的颈部结构的运动控制方法,所述运动控制方法包括:
17、获取俯仰指令,控制其中一个所述驱动单元运行,以使得与所述驱动单元所对应的第二传动单元伸缩而使顶座倾斜;或;
18、获取外伸指令,控制其中两个所述驱动单元运行,以使得与两个所述驱动单元所对应的两个第二传动单元伸缩而使顶座和底座同时倾斜;或;
19、获取旋转指令,控制三个所述驱动单元运行,以使得与三个所述驱动单元所对应的三个第二传动单元伸缩而使顶座旋转。
20、本发明还提供机器人,包括:
21、头部;
22、身体;及
23、颈部结构,连接于所述头部和身体之间,适于驱动所述头部完成旋转、俯仰、外伸动作;
24、其中,所述颈部结构为如上述任一项所述的颈部结构。
25、本发明提供的技术方案,具有以下优点:
26、1、本发明提供的机器人的颈部结构包括设置在顶座与底座之间的三个一对一设置的驱动单元和传动机构以及连杆单元,整体结构简单。将传动机构设置为相互配合的第一传动单元和第二传动单元,第一传动单元将驱动单元的驱动力传递至第二传动单元,以使第二传动单元伸缩,通过三个第二传动单元的配合,以驱动机器人的头部俯仰、旋转、外伸,从而提高机器人的仿生程度。同时,将驱动单元设置于第二传动单元的外侧,通过第一传动单元将驱动单元的驱动力传递至第二传动单元,以实现驱动单元的移轴驱动,降低了传动机构与驱动单元装配后的轴向尺寸,减小机器人的颈部结构体积。
27、2、本发明提供的机器人的颈部结构运动控制方法,通过控制驱动单元运行,以使与三个驱动单元对应的三个第二传动单元的伸缩配合,以实现颈部结构的顶座倾斜、底座倾斜和顶座旋转,即可实现机器人头部的外伸、俯仰和旋转,控制方法简单,便于用户操作。
28、3、本发明提供的机器人,通过设置本申请的机器人的颈部结构,由于该颈部结构可实现机器人头部的旋转、外伸、俯仰,与现有技术相比,本申请的机器人的仿生程度更高。
技术特征:
1.一种机器人的颈部结构,连接于机器人的头部和身体之间,其特征在于,包括:
2.如权利要求1所述的颈部结构,其特征在于,所述驱动单元的轴线与所述第二传动单元的轴线平行或大致平行。
3.如权利要求1所述的颈部结构,其特征在于,所述顶座与所述第一传动单元之间设置有第一铰接机构,所述底座与所述第二传动单元连接。
4.如权利要求3所述的颈部结构,其特征在于,所述驱动单元与所述第二传动单元位于第一传动单元的下方。
5.如权利要求4所述的颈部结构,其特征在于,所述底座与所述第二传动单元通过第二铰接机构连接。
6.如权利要求3所述的颈部结构,其特征在于,所述第一铰接机构到所述顶座的中心的距离大于所述第二铰接机构到所述底座的中心的距离。
7.如权利要求1所述的颈部结构,其特征在于,所述连杆单元包括第一连杆和第二连杆,所述第一连杆和所述顶座、所述第二连杆和所述底座及所述第一连杆和所述第二连杆之间均设置有转动连接件。
8.如权利要求7所述的颈部结构,其特征在于,所述连杆单元的轴线与所述底座和顶座的中心点连线共线。
9.一种应用在如权利要求1至8任一项所述的机器人的颈部结构的运动控制方法,其特征在于,所述运动控制方法包括:
10.一种机器人,其特征在于,包括:
技术总结
本发明公开机器人、机器人的颈部结构及其运动控制方法,该机器人的颈部结构连接于机器人的头部和身体之间,包括用于连接机器人的身体的底座、用于连接机器人的头部的顶座、转动连接于底座和顶座之间的连杆单元、用于输出驱动力的驱动单元及设置在底座和顶座之间的传动机构,传动机构将驱动单元的驱动力传递至底座和/或顶座以驱动头部旋转、俯仰、外伸,驱动单元和传动机构为一对一设置的三个,每个传动机构包括第一传动单元和第二传动单元,第一传动单元将驱动单元的驱动力传递至第二传动单元,以使第二传动单元伸缩,驱动单元位于第二传动单元的外侧。本申请的机器人的颈部结构可带动机器人的头部旋转、俯仰、外伸,以提高机器人的仿生程度。
技术研发人员:曹俊亮
受保护的技术使用者:追觅创新科技(苏州)有限公司
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!