用于可打开对象的机器人抓持器总成和拾取对象的方法与流程
本技术总体上涉及机器人系统,并且更具体地涉及被配置为选择性地抓持和保持可打开对象的机器人抓持器总成。
背景技术:
1、机器人(例如,被配置为自动/自主执行物理动作的机器)现在在许多领域中得到广泛使用。例如,机器人可以用于在制造、包装、运输和/或运送等方面执行各种任务(例如,操纵或搬运对象)。在执行任务时,机器人可以复制人类动作,由此代替或减少执行危险或重复性任务原本所需的人类参与。机器人通常缺乏复制执行更复杂任务所需的人类灵敏度和/或适应性所必需的先进性。例如,机器人通常难以从具有紧邻对象以及不规则形状/大小的对象等的一组对象中选择性地抓持对象。而且,机器人通常限于使用沿着一个预定方向施加的力来抓握对象。因此,仍然需要用于控制和管理机器人的各个方面的改进的机器人系统和技术。
技术实现思路
技术特征:
1.一种机器人系统,其包括:
2.根据权利要求1所述的机器人系统,其中所述控制器还被配置为导出用于操作所述机器人抓持器总成的所述运动计划以:
3.根据权利要求1所述的系统,其中所述控制器还被配置为:
4.根据权利要求1所述的机器人系统,其中所述控制器被配置为导出用于进一步操作所述机器人抓持器总成的所述运动计划以:
5.根据权利要求1所述的机器人系统,其中所述控制器还被配置为基于以下操作导出所述运动计划:
6.根据权利要求1所述的系统,其中所述机器人系统还被配置为:
7.根据权利要求1所述的机器人系统,其中所述机器人抓持器总成还包括附接的稳定器支架,所述稳定器支架被配置为接触并支撑所述抓握的目标对象。
8.一种机器人系统,其包括:
9.根据权利要求8所述的机器人系统,其中所述过程还包括:
10.根据权利要求9所述的机器人系统,其中所述过程还包括:
11.根据权利要求8所述的机器人系统,其中所述过程还包括:
12.根据权利要求8所述的机器人系统,其中所述过程还包括:
13.根据权利要求9所述的机器人系统,其中所述过程还包括:
14.一种操作机器人系统的方法,所述方法包括:
15.根据权利要求14所述的方法,其还包括:
16.根据权利要求15所述的方法,其还包括:
17.根据权利要求14所述的方法,其还包括:
18.根据权利要求14所述的方法,其还包括:
19.根据权利要求14所述的方法,其还包括:
20.根据权利要求14所述的方法,其中附接到所述末端执行器的稳定器支架为所述一个或多个抓持器的抓持力提供支撑。
技术总结
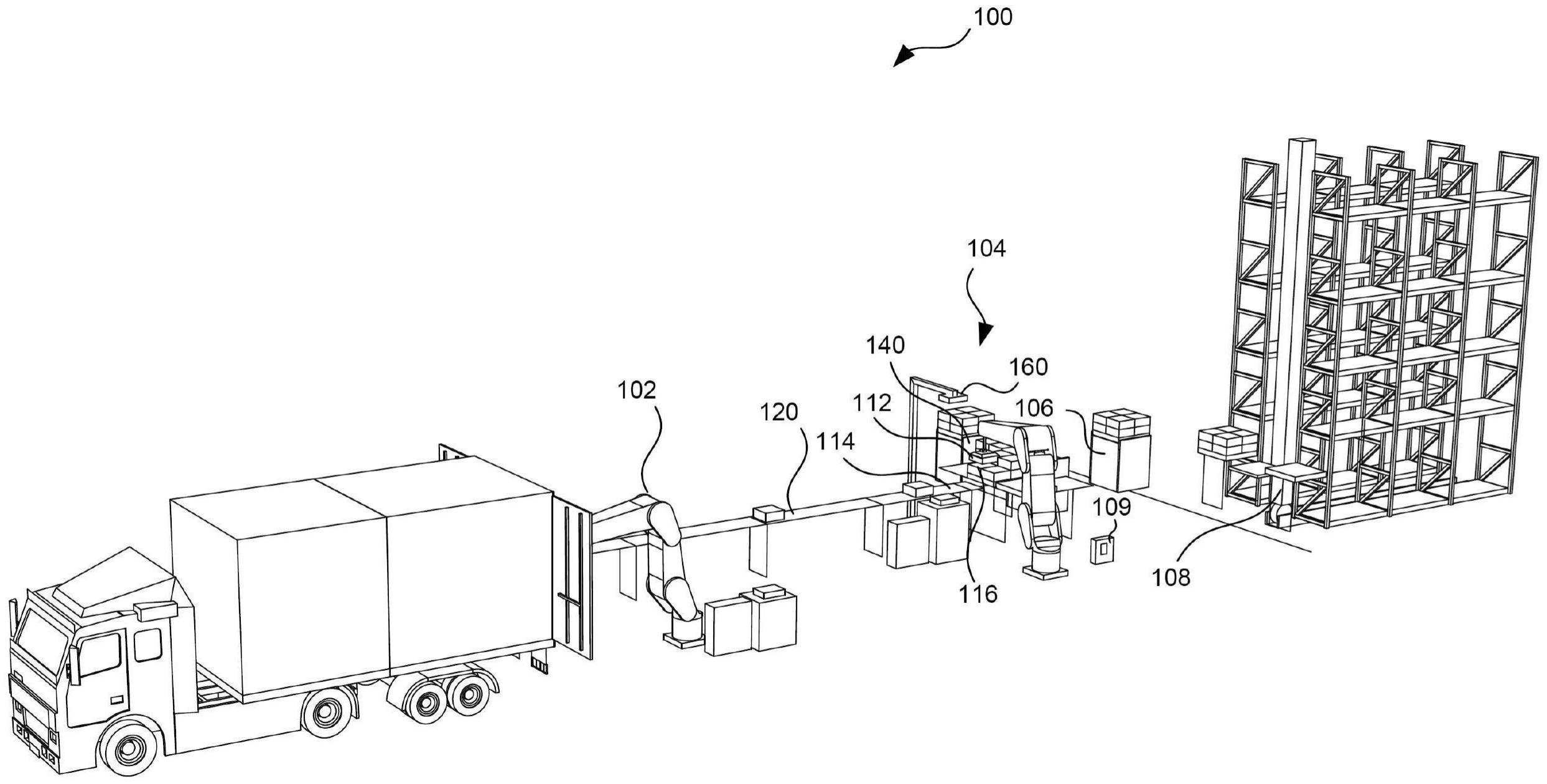
公开了一种用于操作搬运机器人以抓握和搬运对象的系统和方法。所述运输机器人包括具有可寻址真空区域的阵列的机器人抓持器总成,每个可寻址真空区域被配置为独立地提供真空以抓握目标对象。所述抓持器总成可以根据目标对象的一个或多个物理特性和/或对应场景来配置和/或操作。
技术研发人员:普蒂猜·勒特库塔农,沟口弘悟,金本良树,鲁仙·出杏光
受保护的技术使用者:牧今科技
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!