一种电液混合驱动器
本发明属于人工肌肉,尤其涉及电液混合驱动器领域。
背景技术:
1、人工肌肉是一类人造致动器,这些驱动器可以根据驱动信号的变化呈现出各种复杂的状态,例如,弯曲、延伸、扭动和收缩等,并且它们的行为非常接近真正的肌肉纤维。开发人工肌肉不仅对医学具有重大意义,而且对机器人技术的发展也至关重要。
2、目前比较新兴的人工肌肉有气动人工肌肉(例如cn101306535)、压电陶瓷驱动器(如cn110224634)、形状记忆合金(cn106065970)、电活性聚合物等。气动人工肌肉,具有廉价、安全的特点,但气体可压缩性大、稳定性差、排气噪音大;压电陶瓷驱动器响应形变小,驱动电压高;形状记忆合金响应慢,工作温度高;电活性聚合物有:介电弹性体、离子聚合物金属复合材料(ipmc)等。介电弹性体响应速度较快,可以输出较大的应变和驱动压力,但驱动电压较高;离子聚合物金属复合材料(ipmc)可在相对较低的输入电压(1~3v)下产生大的弯曲运动,但是响应速度较慢;此外,上述这些人工肌肉驱动力和驱动位移不够大。因此有必要加以改进和创新。
技术实现思路
1、本发明的目的是克服上述背景技术的不足,提供一种电液混合驱动器,该电液混合驱动器具有响应速度快、驱动力较大以及驱动位移较大的特点。
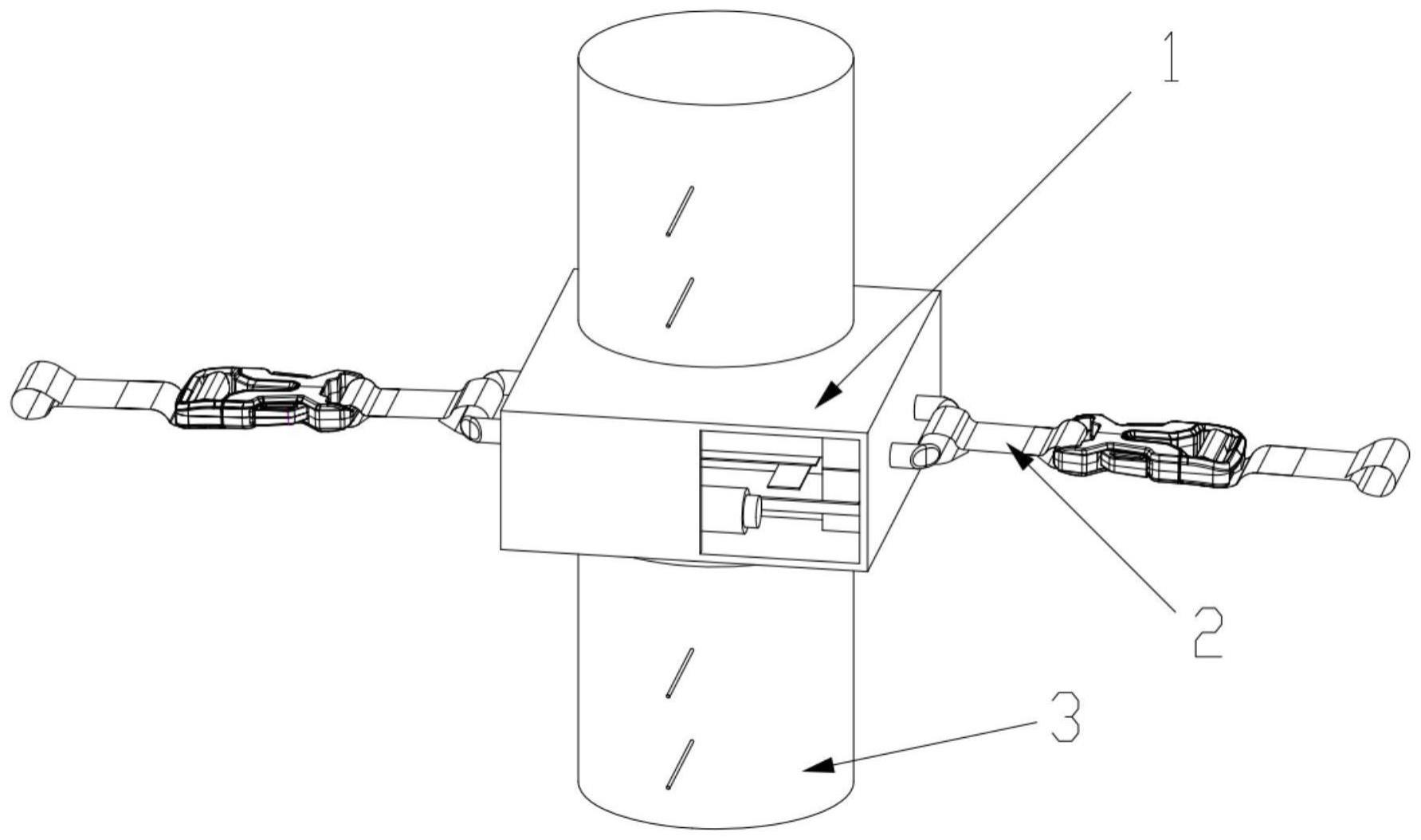
2、本发明提供的技术方案是:一种电液混合驱动器,其特征在于:该驱动器包括驱动模块、连接在驱动模块左右两侧的连接带模块以及设置在驱动模块上下两侧的电磁发生器;所述驱动模块包括外壳、安装在外壳内的驱动导向部以及两个连接器:其中一个连接器与外壳左侧外表面连接,另一个连接器位于外壳右侧外部且穿过外壳与驱动导向部的右侧连接;
3、所述驱动导向部包括:上下叠放且相互之间通过隔板进行隔离的至少两个驱动单元、同时与所有驱动单元的左右两侧固定从而对驱动单元进行导向的导向组件;每个驱动单元包括制作有内腔的高分子聚合物弹性体、置入所述内腔中的磁流变液体、固定在驱动导向部的上下两侧表面的两个可伸缩电极片以及与分别与高分子聚合物弹性体的左右两侧卡嵌固定的两个夹套。
4、进一步地,所述电磁发生器包括连接所述外壳的固定器、连接所述固定器且形成空腔的电磁发生器外壳以及安装在所述空腔内且带有铁芯的绕组。
5、进一步地,所述导向组件包括沿着可水平轴线相互滑动配合的滑套与导向杆;所述导向杆左侧面与外壳左侧内表面固定连接,并且所述滑套与导向杆分别通过各自的固定面与左右两侧的夹套固定连接。
6、进一步地,所述连接器包括依次连接形成u形的两个连接器导向杆与连接器连接杆,两个连接器:其中一个连接器导向杆悬伸端所连接的连接器底片与外壳外表面固定;另一个连接器导向杆悬伸端所连接的连接器底片与驱动单元右侧所有夹套的顶面固定,所述另一个连接器导向杆可移动地穿插在外壳的导向口中。
7、进一步地,所述外壳右侧开有导向口;其前侧或后侧开设有外壳侧开口,可伸缩电极片的接头从该开口中伸出,以便连接外部电源。
8、进一步地,所述的连接带模块包括用于连接连接器的带连接端以及用于连接其他装置的插扣连接端。
9、本发明的有益效果是:本发明提供的电液混合驱动器,能够将静电力、磁力、液压力耦合以实现多种致动模式;而且在电场和磁场的相互作用下进行驱动,进而增大了驱动位移;还通过并联多个驱动单元,增加了输出的驱动力;从而有效解决了背景技术中驱动器的驱动力与驱动位移不够大的问题。
技术特征:
1.一种电液混合驱动器,其特征在于:该驱动器包括驱动模块(1)、连接驱动模块左右两侧的连接带模块(2)以及设置在驱动模块上下两侧的电磁发生器(3);所述驱动模块包括外壳(1-2)、固定在外壳左侧内表面的驱动导向部(1-1)以及两个连接器(1-3):其中一个连接器与外壳左侧外表面连接,另一个连接器位于外壳右侧外部且穿过外壳与驱动导向部的右侧连接;
2.根据权利要求1所述的电液混合驱动器,其特征在于:所述电磁发生器包括连接所述外壳的固定器(3-2)、连接所述固定器且形成空腔的电磁发生器外壳(3-1)、以及安装在所述空腔内且带有铁芯(3-4)的绕组(3-3)。
3.根据权利要求2所述的电液混合驱动器,其特征在于:所述导向组件包括沿着可水平轴线相互滑动配合的滑套(1-1-3-1)与导向杆(1-1-3-2);所述导向杆左侧面(1-1-3-2-3)与外壳左侧内表面固定连接,并且所述滑套与导向杆分别通过各自的固定面与左右两侧的夹套固定连接。
4.根据权利要求3所述的电液混合驱动器,其特征在于:所述连接器(1-3)包括依次连接形成u形的两个连接器导向杆(1-3-3)与连接器连接杆(1-3-2),包括两个连接器:其中一个连接器导向杆悬伸端所连接的连接器底片(1-3-1)与外壳的左侧外表面(1-2-3)固定,另一个连接器导向杆悬伸端所连接的连接器底片(1-3-1)与驱动单元右侧所有夹套的顶面固定;所述另一个连接器导向杆可移动地穿插在外壳的导向口中。
5.根据权利要求4所述的电液混合驱动器,其特征在于:所述外壳右侧开有导向口(1-2-1);其前侧或后侧开设有外壳侧开口(1-2-2),可伸缩电极片的接头从该开口中伸出,以便连接外部电源。
6.根据权利要求5所述的电液混合驱动器,其特征在于:所述的连接带模块(2)包括用于连接连接器的带连接端(2-2)以及用于连接其他装置的插扣连接端(2-1)。
技术总结
本发明属于人工肌肉技术领域。目的是提供一种电液混合驱动器,该电液混合驱动器具有响应速度快、驱动力较大以及驱动位移较大的特点。技术方案是一种电液混合驱动器,其特征在于:该驱动器包括驱动模块、连接在驱动模块左右两侧的连接带模块以及设置在驱动模块上下两侧的电磁发生器;所述驱动模块包括外壳、安装在外壳内的驱动导向部以及两个连接器:其中一个连接器与外壳左侧外表面连接,另一个连接器位于外壳右侧外部且穿过外壳与驱动导向部的右侧连接。
技术研发人员:何青松,仲启云,赵子杰,叶玉泽,曾博,左哲清,张宁,刘永旗,赵泽芳,徐晓东,展凤江
受保护的技术使用者:南京航空航天大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!