一种液压机械手的制作方法
本发明涉及一种机械手,尤其是涉及一种液压式机械手。
背景技术:
1、在物流过程中,物料搬运活动是不断出现和反复进行的,出现的频率较高,每次都要花费很长时间,所消耗的人力也很多。此外,进行搬运操作时往往需要接触货物,在此过程中可能造成货物破损、散失、损耗、混合等损失的现象。传统的物料搬运的主要靠人力,不仅人工成本高,而且效率较低,容易出现货物的损坏。
2、现有的机械手大多是采用纯机械结构,这类机械手爪通常具有以下不足:采用纯机械结构进行驱动以及实现抓取动作,动作僵化,难以灵活地处理形状多变的抓取对象;控制要求比较高,需要对力有很精细化的控制能力以及对力实时数据的快速反馈处理能力;结构复杂,这类机械手爪采用了大量的零部件及复杂的传动机构,也因此极大地增加了成本和制造难度。刚性接触无法满足对易损物体的保护要求,对脆弱物体的抓取有很多不方便的地方。
技术实现思路
1、为了克服上述缺陷,本发明提供了一种液压机械手。
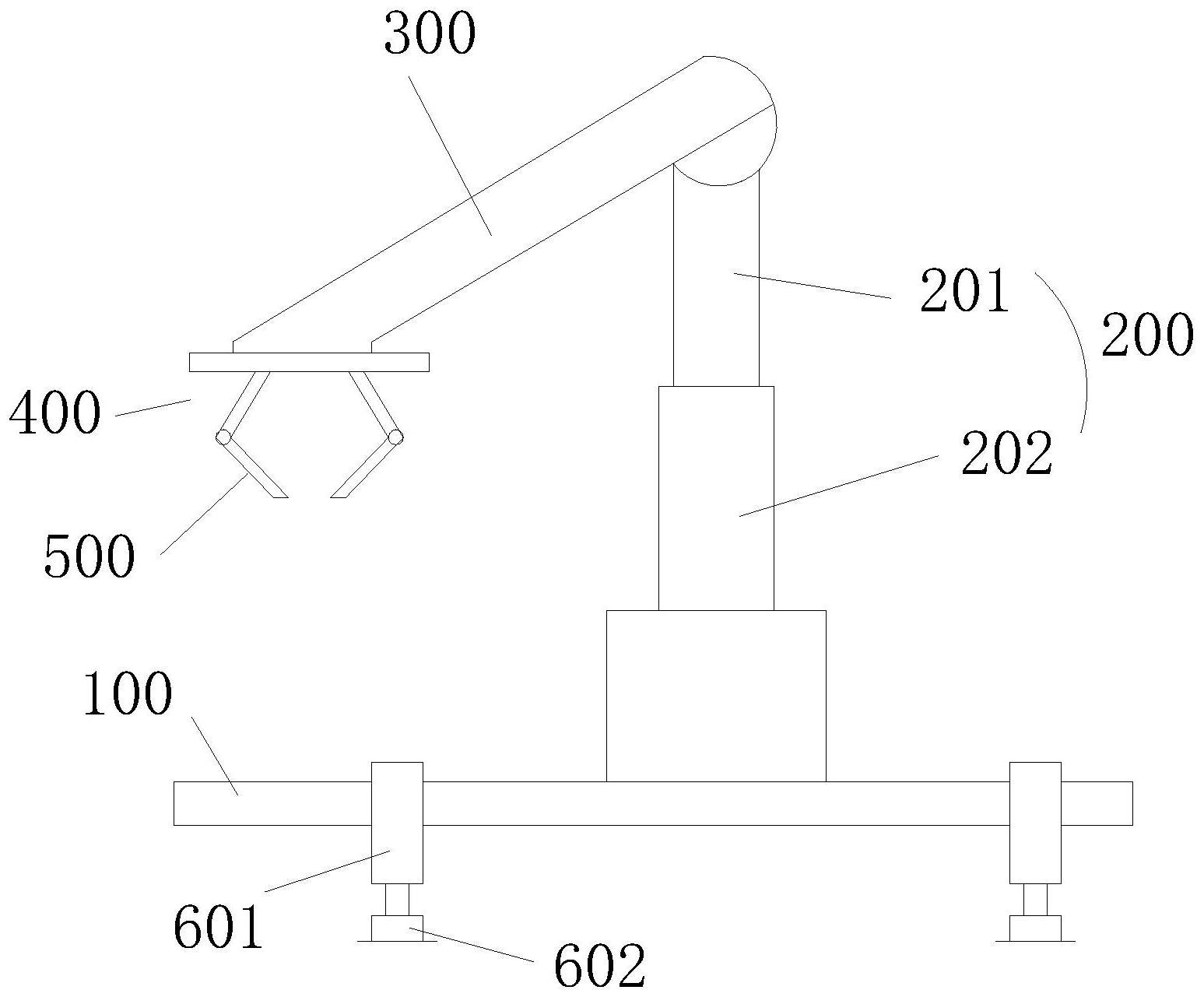
2、本发明解决其技术问题所采用的技术方案是:一种液压机械手,包括底座,所述底座上设有支撑柱,所述支撑柱顶端上设有机械臂,所述机械臂另一端设有机械手,所述机械手电连接控制器;
3、所述机械手包括两组夹持组件,所述夹持组件包括连杆和设置在连杆底端的夹持手,两个所述夹持手相对设置,相邻的两个夹持手侧壁间均为弧形,所述连杆与所述夹持手间通过转轴连接,所述夹持手外表面为弹性材料制成;
4、所述夹持手和所述连接杆间可拆卸连接。
5、在本发明的一个较佳实施例中,所述支撑柱可为伸缩支撑柱,包括内杆和外杆,所述内杆一端设置在外杆内,所述内杆另一端设有机械臂。
6、在本发明的一个较佳实施例中,所述机械臂和所述内杆间通过转轴链,所述内杆通过液压缸驱动沿外杆上下移动。
7、在本发明的一个较佳实施例中,所述底座底端设有支座,所述支座包括底柱和底板,所述底板顶端设有液压缸,所述液压缸顶端连接设有底柱。
8、在本发明的一个较佳实施例中,所述机械手通过转盘连接机械臂,所述机械手通过转盘沿机械臂转动。
9、在本发明的一个较佳实施例中,两个所述夹持手上均设有凸起,所述凸起的外表面为圆弧形。
10、在本发明的一个较佳实施例中,所述凸起采用弹性材料制成。
11、在本发明的一个较佳实施例中,所述底座底端设有滚轮。
12、本发明的有益效果是:本发明结构简单,通过支撑柱的设置提高了机械手的高度调节能力,通过弹性夹持手和凸起的设置,使得机械手可夹持易破碎的物品,提高了夹持手夹持物品的范围,且夹持手与物品间的柔性接触,大大地避免了对易碎物品的损坏,保证夹持手对易碎物品夹持的安全性和稳定性。
技术特征:
1.一种液压机械手,其特征在于,包括底座,所述底座上设有支撑柱,所述支撑柱顶端上设有机械臂,所述机械臂另一端设有机械手,所述机械手电连接控制器;
2.根据权利要求1所述液压机械手,其特征在于,所述支撑柱可为伸缩支撑柱,包括内杆和外杆,所述内杆一端设置在外杆内,所述内杆另一端设有机械臂。
3.根据权利要求2所述液压机械手,其特征在于,所述机械臂和所述内杆间通过转轴链,所述内杆通过液压缸驱动沿外杆上下移动。
4.根据权利要求1所述液压机械手,其特征在于,所述底座底端设有支座,所述支座包括底柱和底板,所述底板顶端设有液压缸,所述液压缸顶端连接设有底柱。
5.根据权利要求1所述液压机械手,其特征在于,所述机械手通过转盘连接机械臂,所述机械手通过转盘沿机械臂转动。
6.根据权利要求1所述液压机械手,其特征在于,两个所述夹持手上均设有凸起,所述凸起的外表面为圆弧形。
7.根据权利要求6所述液压机械手,其特征在于,所述凸起采用弹性材料制成。
8.根据权利要求4所述液压机械手,其特征在于,所述底座底端设有滚轮。
技术总结
本发明涉及一种液压机械手,包括底座,所述底座上设有支撑柱,支撑柱顶端上设有机械臂,机械臂另一端设有机械手,所述机械手电连接控制器;机械手包括两组夹持组件,夹持组件包括连杆和设置在连杆底端的夹持手,两个夹持手相对设置,相邻的两个夹持手侧壁间均为弧形,连杆与所述夹持手间通过转轴连接,所述夹持手外表面为弹性材料制成;所述夹持手和所述连接杆间可拆卸连接。本发明结构简单,通过支撑柱的设置提高了机械手的高度调节能力,通过弹性夹持手和凸起的设置,使得机械手可夹持易破碎的物品,提高了夹持手夹持物品的范围,且夹持手与物品间的柔性接触,大大地避免了对易碎物品的损坏,保证夹持手对易碎物品夹持的安全性和稳定性。
技术研发人员:任月晖
受保护的技术使用者:扬州月之屿科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!