基于变电站数字孪生技术的智能化机器人自动巡检方法与流程
本发明涉及电力设施维护领域,特别涉及一种基于变电站数字孪生技术的智能化机器人自动巡检方法。
背景技术:
1、变电站传统设备巡检普遍采用人工巡视、手工纸介质记录的工作方式,该方式存在着人为因素多、管理成本高、无法准确考核巡检人员工作状态等明显缺陷。为解决以上问题,目前已有科研单位制造出巡检机器人替代人工执行巡检任务,但是巡检机器人需要人工实时控制行进路线以及转向角度,从而增大了巡检机器人使用方的技术难度以及人员成本。
技术实现思路
1、本发明提供的一种基于变电站数字孪生技术的智能化机器人自动巡检方法,基于数字孪生技术,实现了机器人的自动巡视,提高了变电站巡检智慧化程度,降低了人工运维成本,提升了设备巡检效率。
2、为实现上述目的,本发明通过以下技术方案实现:
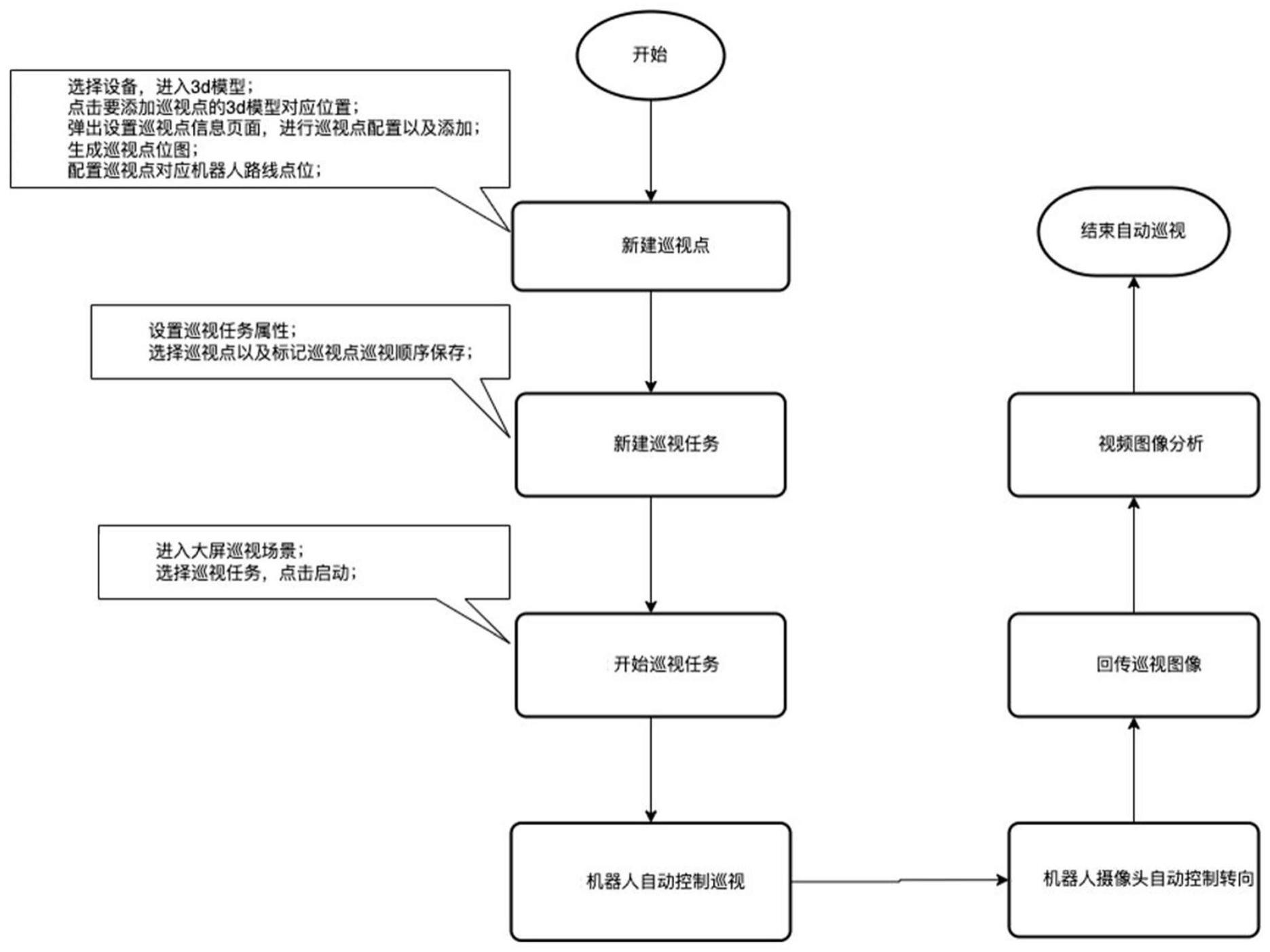
3、一种基于变电站数字孪生技术的智能化机器人自动巡检方法,用于使机器人能够自动巡视变电站的设备,并通过机器人摄像头拍摄巡检影像,包含步骤:
4、s1、对变电站实景进行1:1三维建模生成变电站三维模型;
5、s2、在所述变电站三维模型上建立机器人停留点位,以及与各所述机器人停留点位关联的设备巡视点位;
6、s3、基于各所述机器人停留点位及其关联的设备巡视点位,生成巡视路线;
7、s4、机器人按照所述巡视路线执行巡视任务,录制各所述设备巡视点位的巡检影像并回传;
8、s5、基于回传的所述巡检影像进行视频图像分析,判定各所述设备巡视点是否存在缺陷。
9、可选地,所述变电站三维模型包括该变电站内的建筑布局、所有实体设备及机器人的三维模型,所述变电站三维模型与变电站实景的三维空间位置坐标具有一一映射关系,生成的所述变电站三维模型在显示终端显示。
10、可选地,步骤s2包括:
11、s21、选择变电站内其中一个巡视设备,所述变电站三维模型跳转至所述巡视设备的三维模型;
12、s22、在所述巡视设备的三维模型上选择若干个设备巡视点位;
13、s23、在机器人巡视通道上选择一个对各所述设备巡视点位最佳的观察点位作为机器人停留点位,并将所述机器人停留点位与步骤s22中的各设备巡视点位建立关联映射;
14、s24、重复步骤s21~s23,直至完成变电站内所有的巡视设备的选择,生成该变电站内全部的机器人停留点位及与各机器人停留点位关联的设备巡视点位。
15、可选地,步骤s3包括:
16、s31、按照机器人的走行顺序,基于各所述机器人停留点位的位置、以及与各所述机器人停留点位关联的设备巡视点位的位置,对各所述机器人停留点位及其关联的设备巡视点位配置巡视顺序号;
17、s32、按照所述巡视顺序号的顺序,将各所述机器人停留点位及其关联设备巡视点位串联起来生成巡视路线。
18、可选地,步骤s4包括:
19、s41、机器人按照所述巡视路线,依序停留在各所述机器人停留点位;
20、s42、机器人按照所述巡视路线,依次解析与当前机器人停留点位关联的各设备巡视点位的空间位置信息,通过摄像头转向角度算法,自动控制机器人摄像头录制各所述设备巡视点位,获得巡检影像;
21、s43、机器人将所述巡检影像实时回传至显示终端;
22、s44、重复步骤s41~s43,直至按照所述巡视路线完成全部巡视任务。
23、可选地,步骤s41中,机器人按照所述巡视顺序号依次解析各机器人停留点位的空间位置信息,控制机器人的巡视轨迹,自动停在各所述机器人停留点位。
24、可选地,步骤s42中,当机器人到达所述机器人停留点位准备对其进行巡视时,机器人基于所述设备巡视点位的空间位置坐标、机器人摄像头位置坐标和摄像头当前旋转角度信息,通过摄像头转向角度算法,计算出机器人摄像头的转向角度。
25、综上所述,与现有技术相比,本发明提供的一种基于变电站数字孪生技术的智能化机器人自动巡检方法,具有如下有益效果:
26、基于数字孪生技术,对变电站实景进行1:1三维模型还原,通过配置机器人巡视路线以及机器人摄像头转向角度算法,进行机器人的自动巡视,提高了变电站巡检智慧化程度,降低了人工运维成本,提升了设备巡检效率。
技术特征:
1.一种基于变电站数字孪生技术的智能化机器人自动巡检方法,用于使机器人能够自动巡视变电站的设备,并通过机器人摄像头拍摄巡检影像,其特征在于,包含步骤:
2.如权利要求1所述的智能化机器人自动巡检方法,其特征在于,
3.如权利要求1所述的智能化机器人自动巡检方法,其特征在于,步骤s2包括:
4.如权利要求1所述的智能化机器人自动巡检方法,其特征在于,步骤s3包括:
5.如权利要求1所述的智能化机器人自动巡检方法,其特征在于,步骤s4包括:
6.如权利要求5所述的智能化机器人自动巡检方法,其特征在于,
7.如权利要求6所述的智能化机器人自动巡检方法,其特征在于,
技术总结
本发明提供一种基于变电站数字孪生技术的智能化机器人自动巡检方法,用于使机器人能够自动巡视变电站的设备,并通过机器人摄像头拍摄巡检影像,包含步骤:S1、对变电站实景进行1:1三维建模生成变电站三维模型;S2、在变电站三维模型上建立机器人停留点位,以及与各机器人停留点位关联的设备巡视点位;S3、基于各机器人停留点位及其关联的设备巡视点位,生成巡视路线;S4、机器人按照巡视路线执行巡视任务,录制各设备巡视点位的巡检影像并回传;S5、基于回传的巡检影像进行视频图像分析,判定各设备巡视点是否存在缺陷。本发明基于数字孪生技术,实现了机器人的自动巡视,提高了变电站巡检智慧化程度,降低了人工运维成本,提升了设备巡检效率。
技术研发人员:汤蕾,万轶伦,顾力,张毅洲,吴舒鋆,傅超然,朱涛,黄鑫,何超,张宇,孔令东,申若晨,李孟特,李欢欢
受保护的技术使用者:国网上海市电力公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!