一种集成式弹性阀控制的多段缠绕柔性执行器
本发明涉及特种机器人与特种抓取领域,尤其涉及一种集成式弹性阀控制的多段缠绕柔性执行器。
背景技术:
1、特种机器人工作在险峻的环境下,考虑到工作空间的未知性、环境的复杂性,必须实现简洁的结构、小巧的尺寸实现复杂的功能,机器人执行器末端与其本体需减少能量与信息的交换,使执行器尽可能自成一体,能够独自完成一定的工作任务。
2、缠绕是自然界中常见的一种动物姿态,在人类社会的生产和作业中也有着很多的应用空间。利用气动执行器复现此缠绕动作,如何开发一种集成式弹性阀控制的多段缠绕柔性执行器,以完成对杆件的固定或实现机器人沿固定杆件的移动,具有实际意义和应用价值。
技术实现思路
1、本发明的目的是提供一种集成式弹性阀控制的多段缠绕柔性执行器,解决背景技术中所列的问题。
2、为解决上述技术问题,本发明采用如下技术方案:
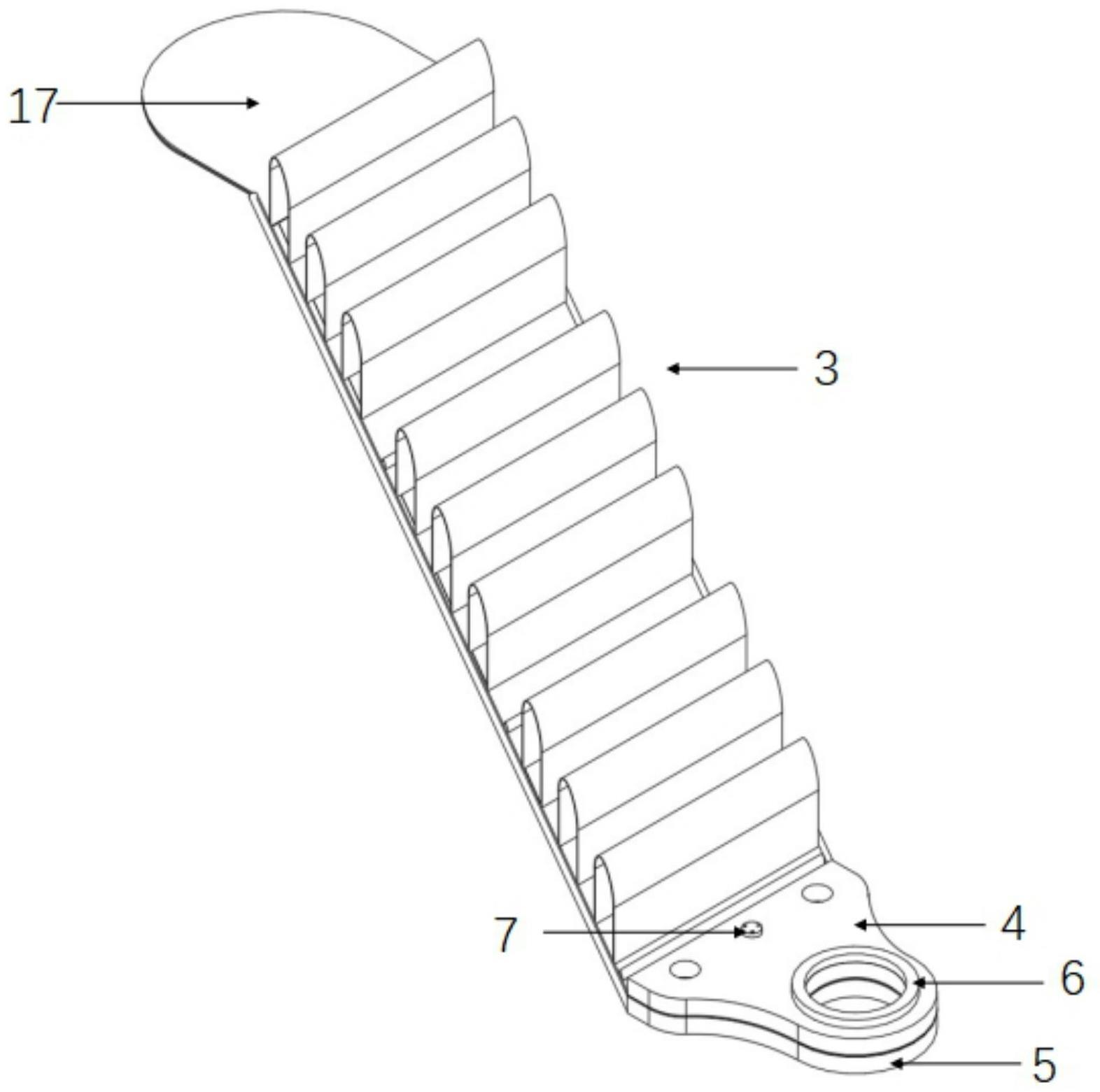
3、本发明一种集成式弹性阀控制的多段缠绕柔性执行器,包括刚性夹持部件、管线、多段式软体执行器和集成式弹性阀,所述多段式软体执行器的前端连接在所述刚性夹持部件内,所述多段式软体执行器的末端连接有向外延伸的压板,所述多段式软体执行器内埋设有管线和所述集成式弹性阀;所述多段式软体执行器通过多个单段执行器串联而成,每个所述单段执行器的底部布置有一个应变传感器。
4、优选的,所述多段式软体执行器通过多个单段执行器串联而成,每个所述单段执行器包括一个刚度保持气囊和一个弯曲气囊,所述弯曲气囊连接在所述刚度保持气囊外侧,所述单段执行器的两侧各设置有一个包裹层,所述管线的分管线位于所述包裹层内。
5、优选的,所述管线包括主管线和分管线,所述主管线包括主气管和主线路,所述分管线包括分气管和分线路,所述主气管的一端与气压泵相连,所述主气管的另一端通过三通阀与两条分气管连通,所述主气管上连接有溢流口;所述集成式弹性阀连接在所述分线路上,所述分线路的一端与所述主线路的一端连接,所述主线路的另一端与核心控制板连接。
6、优选的,所述刚性夹持部件包括上夹板和下夹板,所述上夹板和下夹板通过螺栓连接在一起,所述核心控制板安装在所述上夹板上,所述溢流口安装在所述上夹板上,所述核心控制板与集成式弹性阀、应变传感器电连接。
7、优选的,所述集成式弹性阀包括介电弹性体薄膜、柔性电极、刚性电极、pet柔性板和支撑软管,所述柔性电极涂敷在预拉伸处理后的所述介电弹性体薄膜上,所述柔性电极涂敷的面积小于拉伸后的所述介电弹性体薄膜的面积,所述柔性电极两端与所述刚性电极连接,所述刚性电极固定在所述介电弹性体薄膜的两端,所述介电弹性体薄膜中间区域固定在所述pet柔性板上,所述支撑软管的两端设置为锥形接口,所述锥形接口分别与所述单段执行器上气囊的进气口、所述分气管连通;所述介电弹性体薄膜、所述柔性电极、所述刚性电极和所述pet柔性板缠绕连接在所述支撑软管上集成为集成式弹性阀。
8、优选的,所述刚度保持气囊和所述弯曲气囊的材料选用tpu纤维复合织物。
9、优选的,所述多段式软体执行器与所述刚性夹持部件连接处的夹角设置为120°-140°。
10、优选的,所述集成式弹性阀中,所述介电弹性体薄膜、所述柔性电极、所述刚性电极和所述pet柔性板以螺旋状缠绕在所述支撑软管上,缠绕倾斜的角度设置为30°-60°。
11、优选的,所述刚性夹持部件内部布置有dc/dc转换器。
12、与现有技术相比,本发明的有益技术效果:
13、本发明一种集成式弹性阀控制的多段缠绕柔性执行器,包括连接在一起刚性夹持部件、管线、多段式软体执行器和应变传感器,管线上连接有集成式弹性阀;其中,集成式弹性阀选用介电弹性体材料实现变形,响应速率为毫秒级,制成的阀能够满足电气控制的快速性要求,且具有很高的耐用性,能够在被长期施加高电压的工作环境下稳定工作,只需要尺寸较小的介电弹性体薄膜就能够提供管线开闭所需的力;应变传感器的设计,主要用来检测单段执行器与应变传感器粘合部位的弯曲程度,并与核心控制板连接进行反馈控制,实现驱动-感知一体化;充气时,向弯曲气囊充入气体,实现多段式软体执行器向无褶皱一侧弯曲,完成抱杆动作;不同的充气压强可带来不同的弯曲效果,且可通过输入负压实现弯曲动作消除;且通过有选择的对各单段执行器充气和对各单段执行器充入不同的压力,能够实现不同工作环境下的可靠缠绕作业。
14、总的来说,本发明将复杂的控制元器件集成至软体执行器本体,实现器件的整体小型化,集结构、驱动、感知为一体,实现不同工作环境下的可靠缠绕作业;克服了传统的气驱动执行器以及搭载的气动驱动系统的尺寸较大,不适合应用于狭小空间的劣势。本发明适用于微小型气动抓手或抱杆执行器末端,可在特种机器人和特种抓取领域进行更深入的应用。
技术特征:
1.一种集成式弹性阀控制的多段缠绕柔性执行器,其特征在于:包括刚性夹持部件(1)、管线、多段式软体执行器(3)和集成式弹性阀(8),所述多段式软体执行器(3)的前端连接在所述刚性夹持部件(1)内,所述多段式软体执行器(3)的末端固定有向外延伸的压板(17),所述多段式软体执行器(3)内埋设有管线和所述集成式弹性阀(8);所述多段式软体执行器(3)通过多个单段执行器串联而成,每个所述单段执行器的底部布置有一个应变传感器(18)。
2.根据权利要求1所述的一种集成式弹性阀控制的多段缠绕柔性执行器,其特征在于:所述多段式软体执行器(3)通过多个单段执行器串联而成,每个所述单段执行器包括一个刚度保持气囊(15)和一个弯曲气囊(16),所述弯曲气囊(16)连接在所述刚度保持气囊(15)外侧,所述单段执行器的两侧各设置有一个包裹层(9),所述管线的分管线(2)位于所述包裹层(9)内。
3.根据权利要求2所述的一种集成式弹性阀控制的多段缠绕柔性执行器,其特征在于:所述管线包括主管线(10)和分管线(2),所述主管线(10)包括主气管和主线路,所述分管线(2)包括分气管和分线路,所述主气管的一端与气压泵相连,所述主气管的另一端通过三通阀与两条分气管连通,所述主气管上连接有溢流口(7);所述集成式弹性阀(8)连接在所述分线路上,所述分线路的一端与所述主线路的一端连接,所述主线路的另一端与核心控制板(6)连接。
4.根据权利要求3所述的一种集成式弹性阀控制的多段缠绕柔性执行器,其特征在于:所述刚性夹持部件(1)包括上夹板(4)和下夹板(5),所述上夹板(4)和下夹板(5)通过螺栓连接在一起,所述核心控制板(6)安装在所述上夹板(4)上,所述溢流口(7)安装在所述上夹板(4)上,所述核心控制板(6)与集成式弹性阀(8)、应变传感器(18)电连接。
5.根据权利要求3所述的一种集成式弹性阀控制的多段缠绕柔性执行器,其特征在于:所述集成式弹性阀(8)包括介电弹性体薄膜(11)、柔性电极(12)、刚性电极(13)、pet柔性板(14)和支撑软管(19),所述柔性电极(12)涂敷在预拉伸处理后的所述介电弹性体薄膜(11)上,所述柔性电极(12)涂敷的面积小于拉伸后的所述介电弹性体薄膜(11)的面积,所述柔性电极(12)两端与所述刚性电极(13)连接,所述刚性电极(13)固定在所述介电弹性体薄膜(11)的两端,所述介电弹性体薄膜(11)中间区域固定在所述pet柔性板(14)上,所述支撑软管(19)的两端设置为锥形接口,所述锥形接口分别与所述单段执行器上气囊的进气口、所述分气管连通;所述介电弹性体薄膜(11)、所述柔性电极(12)、所述刚性电极(13)和所述pet柔性板(14)连接后缠绕在所述支撑软管(19)上。
6.根据权利要求2所述的一种集成式弹性阀控制的多段缠绕柔性执行器,其特征在于:所述刚度保持气囊(15)和所述弯曲气囊(16)的材料选用tpu纤维复合织物。
7.根据权利要求1所述的一种集成式弹性阀控制的多段缠绕柔性执行器,其特征在于:所述多段式软体执行器(3)与所述刚性夹持部件(1)连接处的夹角设置为120°-140°。
8.根据权利要求5所述的一种集成式弹性阀控制的多段缠绕柔性执行器,其特征在于:所述集成式弹性阀(8)中,所述介电弹性体薄膜(11)、所述柔性电极(12)、所述刚性电极(13)和所述pet柔性板(14)以螺旋状缠绕在所述支撑软管(19)上,缠绕倾斜的角度设置为30°-60°。
9.根据权利要求4所述的一种集成式弹性阀控制的多段缠绕柔性执行器,其特征在于:所述刚性夹持部件(1)内部布置有dc/dc转换器。
技术总结
本发明公开了一种集成式弹性阀控制的多段缠绕柔性执行器,涉及到特种机器人与特种抓取领域,包括刚性夹持部件、管线、多段式软体执行器和集成式弹性阀,所述多段式软体执行器的前端连接在所述刚性夹持部件内,所述多段式软体执行器的末端固定有向外延伸的压板,所述多段式软体执行器内埋设有管线和所述集成式弹性阀;所述多段式软体执行器通过多个单段执行器串联而成,每个所述单段执行器的底部布置有一个应变传感器。本发明将复杂的控制元器件集成至软体执行器本体,实现器件的整体小型化,集结构、驱动、感知为一体,实现不同工作环境下的可靠缠绕作业。
技术研发人员:王周义,段云龙,尹潇,袁清松
受保护的技术使用者:南京航空航天大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!