机械臂外力碰撞检测处理方法及装置、嵌入式伺服驱动器与流程
本申请涉及机器人,具体涉及一种机械臂外力碰撞检测处理方法及装置、嵌入式伺服驱动器。
背景技术:
1、机器人机械臂一般具备多个自由度,以便于在实际运行过程中,执行对操作对象的抓取、搬运、拣选等作业任务。另外,在机械臂作业过程中,安全性至关重要,尤其对于协作机器人,需要和人共处同一个操作环境进行操作,机械臂动作过程中是否安全是必须要考虑的问题,这时机械臂的碰撞安全就是最重要的一个考虑因素。因此,安全要求至少包括:当机械臂在动作过程中,机械臂本体如果意外地受到外力,比如与外部物体发生碰撞,或者与人体接触发生碰撞时,必须马上停止动作,以减少伤害。
2、目前,检测外力碰撞的实现方法有多种,比如力矩传感器、多自由度传感器、电流大小检测、依靠算法模型等,但这些方法均有各自应用限制因素,比如力矩传感器价格昂贵,比如多自由度传感器仅能较准确地检测末端关节的受力,而对其他关节受力敏感度减低,又比如电流大小检测中需要依靠设置的门槛,导致可靠性、敏感性并不高,再比如需要精准的算法模型等等。
技术实现思路
1、有鉴于此,本说明书实施例提供一种机械臂外力碰撞检测处理方法及装置、嵌入式伺服驱动器,通过结构简单且成本低的检测处理方案,能够实时、准确、可靠地解决了机器人的机械臂动作过程中受到外力碰撞时检测处理难题。
2、本说明书实施例提供以下技术方案:
3、本说明书实施例提供一种机械臂外力碰撞检测处理方法,其特征在于,包括:
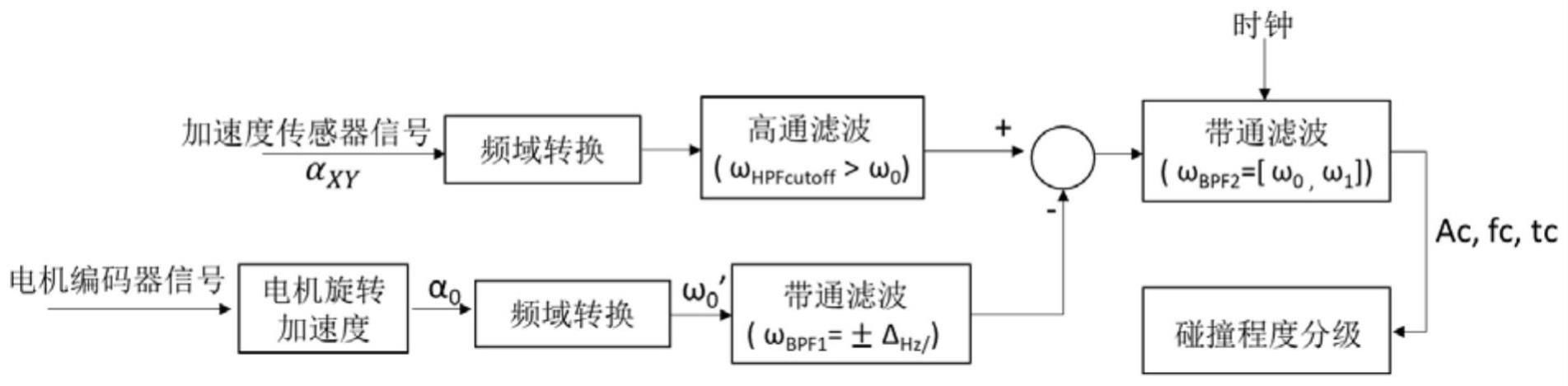
4、获取机械臂对应的加速度传感信号,其中所述加速度传感信号为加速度传感器得到的信号在横向平面内的等效加速度信号,所述横向平面为垂直于所述机械臂的轴向的平面,所述机械臂的伺服驱动器集成设置有所述加速度传感器;
5、获取所述机械臂对应的电机编码器信号,其中所述电机编码器信号包含有电机旋转加速度信息;
6、确定所述加速度传感器信号和所述电机旋转加速度信息之间的差异数据;
7、根据所述差异数据确定所述机械臂所受外力碰撞情况。
8、优选地,获取机械臂对应的加速度传感信号包括:
9、确定所述加速度传感器的坐标系与所述机械臂的坐标系之间的夹角关系;
10、根据所述夹角关系,将加速度传感器得到的信号转换为所述机械臂的横向平面内的等效信号,以作为所述机械臂对应的加速度传感信号。
11、优选地,确定所述加速度传感器信号和所述电机旋转加速度信息之间的差异数据包括:
12、在频域上分别将所述加速度传感器信号和所述电机旋转加速度信息转换为对应的频域数据后,确定所述加速度传感器信号和所述电机旋转加速度信息之间的差异数据。
13、优选地,在频域上转换为对应的频域数据后,对所述加速度传感器信号对应的频域数据进行高通滤波,其中高通滤波的截止频率设为所述机械臂的电机旋转电角频率;
14、和/或,在频域上转换为对应的频域数据后,对所述电机旋转加速度信息对应的频域数据进行带通滤波,其中带通滤波的带宽设置为频率增量值的两倍。
15、优选地,在确定所述加速度传感器信号和所述电机旋转加速度信息之间的差异数据后,所述机械臂外力碰撞检测处理方法还包括:
16、对所述差异数据进行带通滤波,其中,带通滤波的下限频率设置为所述电机旋转加速度信息对应的频率,带通滤波的上限频率设置为预设频率;
17、将所述差异数据经带通滤波后得到的结果数据,作为所述机械臂受到当前外力碰撞时对应的碰撞频率成分信号,其中所述碰撞频率成分信号对应的幅值记为ac、频率记为fc以及碰撞时间长度记为tc。
18、优选地,根据所述差异数据确定所述机械臂所受外力碰撞情况包括:
19、在频域范围内,对所述碰撞频率成分信号进行能量积分;
20、将能量积分的结果与预设门槛值进行比较,以确定所述机械臂所受外力碰撞情况,所述门槛值用于作为所述机械臂受外力碰撞时进行碰撞分级的阈值。
21、优选地,在对所述碰撞频率成分信号进行能量积分前,将碰撞时间长度小于预设时间的碰撞频率成分信号作为噪音数据进行丢弃处理。
22、优选地,所述门槛值为通过机器人的人机接口输入的值,所述机器人为包含有所述机械臂的机器人;
23、或者,所述门槛值为通过以下标定过程得到的值:确定当前待标定的碰撞分级,获取所述机械臂所受外部施加的瞬时外力对应的碰撞能量,并根据获取到的多次碰撞能量确定所述当前待标定的碰撞分级对应的门槛值。
24、本说明书实施例还提供一种机械臂外力碰撞检测处理装置,包括:
25、集成设置于机械臂的伺服驱动器中的加速度传感器,所述加速度传感器用于对机械臂的外力碰撞状况进行检测并提供反映该外力碰撞对应的加速度;
26、信号处理单元被配置为执行:本说明中任意一项实施例所述机械臂外力碰撞检测处理方法的相关步骤。
27、本说明书实施例还提供一种嵌入式伺服驱动器,所述嵌入式伺服驱动器设置于机械臂的内部,其中所述嵌入式伺服驱动器集成设置有加速度传感器,用于执行本说明中任意一项实施例所述机械臂外力碰撞检测处理方法的相关步骤。
28、与现有技术相比,本说明书实施例采用的上述至少一个技术方案能够达到的有益效果至少包括:
29、通过在传统嵌入式伺服驱动器集成设计加速度传感器,并可以利用驱动器自身具备的数据处理系统(即资源和计算能力)对外力碰撞机械臂进行检测分析和处理,能够实时、准确且可靠地感知机械臂外力碰撞,解决机器人机械臂动作过程中受到外力碰撞时检测的技术难题,相较于其他检测处理方案,本说明书提供了一种直接、可靠的机械臂外力碰撞检测处理方案,从而能够为机器人控制器提供实时、准确、可靠的碰撞分析结果,保障了机械臂在应用中的安全性和可靠性。
技术特征:
1.一种机械臂外力碰撞检测处理方法,其特征在于,包括:
2.根据权利要求1所述的机械臂外力碰撞检测处理方法,其特征在于,获取机械臂对应的加速度传感信号包括:
3.根据权利要求1所述的机械臂外力碰撞检测处理方法,其特征在于,确定所述加速度传感器信号和所述电机旋转加速度信息之间的差异数据包括:
4.根据权利要求3所述的机械臂外力碰撞检测处理方法,其特征在于,在频域上转换为对应的频域数据后,对所述加速度传感器信号对应的频域数据进行高通滤波,其中高通滤波的截止频率设为所述机械臂的电机旋转电角频率;
5.根据权利要求3所述的机械臂外力碰撞检测处理方法,其特征在于,在确定所述加速度传感器信号和所述电机旋转加速度信息之间的差异数据后,所述机械臂外力碰撞检测处理方法还包括:
6.根据权利要求5所述的机械臂外力碰撞检测处理方法,其特征在于,根据所述差异数据确定所述机械臂所受外力碰撞情况包括:
7.根据权利要求6所述的机械臂外力碰撞检测处理方法,其特征在于,在对所述碰撞频率成分信号进行能量积分前,将碰撞时间长度小于预设时间的碰撞频率成分信号作为噪音数据进行丢弃处理。
8.根据权利要求6所述的机械臂外力碰撞检测处理方法,其特征在于,所述门槛值为通过机器人的人机接口输入的值,所述机器人为包含有所述机械臂的机器人;
9.一种机械臂外力碰撞检测处理装置,其特征在于,包括:
10.一种嵌入式伺服驱动器,其特征在于,所述嵌入式伺服驱动器设置于机械臂的内部,其中所述嵌入式伺服驱动器集成设置有加速度传感器,用于执行如权利要求1至8中任意一项所述机械臂外力碰撞检测处理方法的步骤。
技术总结
本申请提供一种机械臂外力碰撞检测处理方法及装置、嵌入式伺服驱动器,应用于机器人技术领域,其中机械臂外力碰撞检测处理方法包括:获取机械臂对应的加速度传感信号和电机编码器信号,其中电机编码器信号包含有电机旋转加速度信息;确定加速度传感器信号和电机旋转加速度信息之间的差异数据;根据差异数据确定机械臂所受外力碰撞情况。通过在嵌入式伺服驱动器集成设置加速度传感器,并利用伺服驱动器自身具备的数据处理能力对机械臂所受外力碰撞进行检测分析处理,解决了机器人的机械臂动作过程中受到外力碰撞时检测的技术难题,与其他检测处理方案相比,不仅结构简单、成本低,而且能够实时、准确、可靠地对机械臂的外力碰撞进行检测处理。
技术研发人员:董易,张建政,韦鲲,邹金沛,李方保,李亮华
受保护的技术使用者:上海飒智智能科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!