一种用于变电站巡检机器人的动态性能测试装置的制作方法
本发明涉及巡检机器人测试,尤其是涉及一种用于变电站巡检机器人的动态性能测试装置。
背景技术:
1、随着科技的不断进步,巡检机器人的应用范围逐渐覆盖变电站、电力隧道、核退役与核辐射和冶金化工等高危环境,为解决电力部门人工巡检存在的安全风险高、巡检效率低以及发现和处理故障及时性差等问题,变电站巡检机器人应运而生,在变电站巡检机器人投放使用前,需要对变电站巡检机器人的一些性能进行实验测试,以保证投放使用;
2、其中,其动态性能测试包括基本运动性能测试、跑坡度测试、垂直越障碍高度测试等,其在测试过程中常在水泥地上进行,然而,变电站巡检机器人在工作过程中也可能伴随天气的变化会对其使用性能产生影响,如雨天、有风天等,而目前不能够在测试过程中对天气环境进行模拟,从而导致其测试准确度降低。
技术实现思路
1、本发明要解决的技术问题是克服现有的缺陷,提供一种用于变电站巡检机器人的动态性能测试装置,可以模拟雨天和有风的环境,其模拟效果好,从而保证了测试的准确度,可以有效解决背景技术中的问题。
2、为了实现所述发明目的,本发明采用如下技术方案:
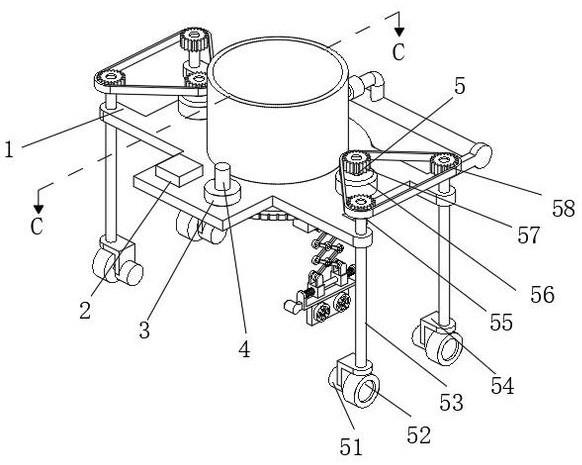
3、一种用于变电站巡检机器人的动态性能测试装置,包括机架,所述机架的顶部分别安装有电源、plc控制器和喷水单元,plc控制器的顶部安装有无线收发器,所述机架的顶部靠近边部位置安装有移动单元,机架的底部安装有角度调节单元,所述角度调节单元的调节部位上安装有升降机构,升降机构的升降部位上分别安装有鼓风机和摄像头;
4、其中,所述无线收发器、鼓风机、摄像头和电源均电性连接plc控制器。
5、进一步的,所述移动单元包括步进电机、移动轮、转轴和轮座,轮座通过转轴与机架转动连接,所述步进电机安装在轮座的侧面,移动轮安装在步进电机的输出轴上,所述步进电机电性连接plc控制器。
6、进一步的,所述移动单元还包括链条、第一伺服电机、主动链轮和从动链轮,伺服电机安装在机架的顶部,所述主动链轮固定在伺服电机的输出轴上,从动链轮固定在转轴的顶端,且主动链轮通过链条与从动链轮传动连接,所述伺服电机电性连接plc控制器。
7、进一步的,所述喷水单元包括喷淋管、水管、水箱、水泵和流量调节阀,喷淋管固定在机架的支架上,所述水箱固定在机架的顶部,水泵安装在水箱的内侧,且水泵通过水管与喷淋管内部连通,所述水泵和流量调节阀均电性连接plc控制器。
8、进一步的,所述角度调节单元包括环形滑轨和滑动座,环形滑轨固定在机架的底部,所述滑动座滑动连接在环形滑轨上。
9、进一步的,所述角度调节单元还包括齿盘、第二伺服电机和齿轮,齿盘固定在机架的底部,所述第二伺服电机安装在滑动座上,齿轮固定在第二伺服电机的输出轴上,且齿轮与齿盘齿间啮合,所述第二伺服电机电性连接plc控制器。
10、进一步的,所述升降机构包括连接架、滑槽和传动座,连接架固定在滑动座的底部,所述滑槽开设在连接架上,传动座滑动连接在滑槽的内部。
11、进一步的,所述升降机构还包括第三伺服电机和双向丝杆,第三伺服电机安装在连接架的端部,所述双向丝杆固定在第三伺服电机的输出轴上,双向丝杆与传动座螺纹连接,所述第三伺服电机电性连接plc控制器。
12、进一步的,所述升降机构还包括菱形伸缩架和滑块,菱形伸缩架的顶端与传动座的底部铰接安装,所述滑块铰接安装在菱形伸缩架的底端。
13、进一步的,所述升降机构还包括弹簧、导杆和安装架,导杆的端部与安装架固定连接,所述弹簧套接在导杆上,弹簧的端部分别与安装架和滑块固定连接,所述鼓风机和摄像头均安装在安装架上。
14、与现有技术相比,本发明的有益效果是:本用于变电站巡检机器人的动态性能测试装置,具有以下好处:
15、1、通过移动单元使该测试装置随着巡检机器人的移动而进行移动,从而便于进行测试工作。
16、2、通过喷水单元打湿路面,从而来模拟下雨天的路面环境,通过鼓风机吹风来模拟有风的环境,通过角度调节单元对鼓风机的吹风角度进行调节,通过升降机构对鼓风机的工作高度进行调节,其模拟效果好,从而保证了测试的准确度。
技术特征:
1.一种用于变电站巡检机器人的动态性能测试装置,包括机架(1),其特征在于:所述机架(1)的顶部分别安装有电源(2)、plc控制器(3)和喷水单元(6),plc控制器(3)的顶部安装有无线收发器(4),所述机架(1)的顶部靠近边部位置安装有移动单元(5),机架(1)的底部安装有角度调节单元(7),所述角度调节单元(7)的调节部位上安装有升降机构(8),升降机构(8)的升降部位上分别安装有鼓风机(9)和摄像头(10);
2.根据权利要求1所述的一种用于变电站巡检机器人的动态性能测试装置,其特征在于:所述移动单元(5)包括步进电机(51)、移动轮(52)、转轴(53)和轮座(54),轮座(54)通过转轴(53)与机架(1)转动连接,所述步进电机(51)安装在轮座(54)的侧面,移动轮(52)安装在步进电机(51)的输出轴上,所述步进电机(51)电性连接plc控制器(3)。
3.根据权利要求2所述的一种用于变电站巡检机器人的动态性能测试装置,其特征在于:所述移动单元(5)还包括链条(55)、第一伺服电机(56)、主动链轮(57)和从动链轮(58),伺服电机(56)安装在机架(1)的顶部,所述主动链轮(57)固定在伺服电机(56)的输出轴上,从动链轮(58)固定在转轴(53)的顶端,且主动链轮(57)通过链条(55)与从动链轮(58)传动连接,所述伺服电机(56)电性连接plc控制器(3)。
4.根据权利要求1所述的一种用于变电站巡检机器人的动态性能测试装置,其特征在于:所述喷水单元(6)包括喷淋管(61)、水管(62)、水箱(63)、水泵(64)和流量调节阀(65),喷淋管(61)固定在机架(1)的支架上,所述水箱(63)固定在机架(1)的顶部,水泵(64)安装在水箱(63)的内侧,且水泵(64)通过水管(62)与喷淋管(61)内部连通,所述水泵(64)和流量调节阀(65)均电性连接plc控制器(3)。
5.根据权利要求1所述的一种用于变电站巡检机器人的动态性能测试装置,其特征在于:所述角度调节单元(7)包括环形滑轨(72)和滑动座(73),环形滑轨(72)固定在机架(1)的底部,所述滑动座(73)滑动连接在环形滑轨(72)上。
6.根据权利要求5所述的一种用于变电站巡检机器人的动态性能测试装置,其特征在于:所述角度调节单元(7)还包括齿盘(71)、第二伺服电机(75)和齿轮(74),齿盘(71)固定在机架(1)的底部,所述第二伺服电机(75)安装在滑动座(73)上,齿轮(74)固定在第二伺服电机(75)的输出轴上,且齿轮(74)与齿盘(71)齿间啮合,所述第二伺服电机(75)电性连接plc控制器(3)。
7.根据权利要求5所述的一种用于变电站巡检机器人的动态性能测试装置,其特征在于:所述升降机构(8)包括连接架(82)、滑槽(83)和传动座(84),连接架(82)固定在滑动座(73)的底部,所述滑槽(83)开设在连接架(82)上,传动座(84)滑动连接在滑槽(83)的内部。
8.根据权利要求7所述的一种用于变电站巡检机器人的动态性能测试装置,其特征在于:所述升降机构(8)还包括第三伺服电机(81)和双向丝杆(86),第三伺服电机(81)安装在连接架(82)的端部,所述双向丝杆(86)固定在第三伺服电机(81)的输出轴上,双向丝杆(86)与传动座(84)螺纹连接,所述第三伺服电机(81)电性连接plc控制器(3)。
9.根据权利要求8所述的一种用于变电站巡检机器人的动态性能测试装置,其特征在于:所述升降机构(8)还包括菱形伸缩架(85)和滑块(87),菱形伸缩架(85)的顶端与传动座(84)的底部铰接安装,所述滑块(87)铰接安装在菱形伸缩架(85)的底端。
10.根据权利要求9所述的一种用于变电站巡检机器人的动态性能测试装置,其特征在于:所述升降机构(8)还包括弹簧(88)、导杆(89)和安装架(810),导杆(89)的端部与安装架(810)固定连接,所述弹簧(88)套接在导杆(89)上,弹簧(88)的端部分别与安装架(810)和滑块(87)固定连接,所述鼓风机(9)和摄像头(10)均安装在安装架(810)上。
技术总结
一种用于变电站巡检机器人的动态性能测试装置,涉及巡检机器人测试技术领域,包括机架,所述机架的顶部分别安装有电源、PLC控制器和喷水单元,PLC控制器的顶部安装有无线收发器,所述机架的顶部靠近边部位置安装有移动单元,机架的底部安装有角度调节单元,所述角度调节单元的调节部位上安装有升降机构,升降机构的升降部位上分别安装有鼓风机和摄像头,该用于变电站巡检机器人的动态性能测试装置,可以模拟雨天和有风的环境,其模拟效果好,从而保证了测试的准确度。
技术研发人员:王耿祥,桑小兵,曹宜安,王占波,史晓燕,韩啸旭,佘彦杰,石恒星,申莹莹,丹倩,孙朋,殷朋飞
受保护的技术使用者:国网河南省电力公司洛阳供电公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!