空中捆扎机器人系统
本发明涉及建筑施工,尤其涉及一种空中捆扎机器人系统。
背景技术:
1、钢筋工程是建筑工程的重要组成部分,其很大程度上影响着建筑工程的施工与效率。我国正处于城市化建设的重要发展时期,钢筋工程任务繁重。一方面工程建设施工周期紧、施工要求高,危险性大,另一方面人工绑扎钢筋效率低,严重制约着施工质量提升与工程进度的推进。
2、目前已经出现了一些钢筋绑扎系统。如美国建筑机器人公司推出了钢筋绑扎机器人tybot,其结构主要式大型三轴龙门框架配合钢筋捆扎机构对钢筋进行绑扎,该设备适用于大型施工的场合,但其缺点设备在运行前需要在现场提前施工,铺设大型轨道,工作效率低下。日本机器人公司研发的小型钢筋捆扎机器人,其工作方式主要是通过机械腿在钢筋中行走与施工,对钢筋摆放的规整程度要求高,无法在钢筋摆放不均匀的场景中施工。
技术实现思路
1、本发明的目的在于提供一种空中捆扎机器人系统,实现单台无人机单独作业与空中机器人机集群状态下的联合作业以完成危险性较大的钢筋绑扎任务。
2、为达此目的,本发明采用以下技术方案:
3、空中捆扎机器人系统,包括:
4、空中捆扎机器人,所述空中捆扎机器人包括飞行控制器以及设置在所述飞行控制器上的若干旋翼;
5、钢筋捆扎器,所述钢筋捆扎器设置在所述飞行控制器的下部,以对目标钢筋进行捆扎;
6、调整机械组件,所述调整机械组件包括至少三组并联机械臂,所述并联机械臂安置在所述飞行控制器的下部,所述并联机械臂的输出端连接所述钢筋捆扎器,以调整所述钢筋捆扎器的位置;
7、识别控制组件,所述识别控制组件包括设置在飞行控制器上的定位模块、钢筋检测摄像头以及板载计算机,所述板载计算机与定位站信号连接,所述板载计算机分别与所述定位模块和所述钢筋检测摄像头连接以对目标钢筋进行定位和检测,所述板载计算机与所述钢筋捆扎器以及所述并联机械臂连接以控制二者运动。
8、作为优选,所述调整机械组件包括静平台,所述静平台可拆卸的安装在所述飞行控制器的下部,所述并联机械臂设置三组,三组所述并联机械臂的一端均匀周向连接在所述静平台上,所述并联机械臂的另一端连接有动平台,所述钢筋捆扎器可旋转的安装在所述动平台上。
9、作为优选,所述并联机械臂包括旋转动力部、主动臂和从动臂,所述旋转动力部与所述静平台上下转动连接,所述旋转动力部的输出端连接所述主动臂的第一端以驱动所述主动臂相对于所述静平台上下转动,所述主动臂的第二端转动连接所述从动臂的第一端,所述从动臂的第二端与所述动平台转接。
10、作为优选,所述静平台的底端设置有动力控制器,所述动力控制器连接所述板载计算机,所述动力控制器控制所述旋转动力部进行运动。
11、作为优选,所述钢筋捆扎器包括绕丝轮、钢丝绑扎头、舵机、绕丝轮固定架;所述舵机、所述钢丝绑扎头分别与所述板载计算机连接,所述绕丝轮固定架套置于所述钢丝绑扎头的外部,所述绕丝轮转接在所述绕丝轮固定架上,所述绕丝轮固定架与所述钢丝绑扎头的外部套设有转动架,所述舵机设置在所述转动架上,所述舵机的输出端连接有齿轮,所述动平台上设置有安装所述钢丝绑扎头的安置孔,所述安置孔上设置有与所述齿轮啮合的内齿以使所述转动架与所述动平台互相转动。
12、作为优选,所述安置孔内设置有安置台阶,所述转动架置于所述安置台阶上进行转动,所述动平台上设有压板,所述压板上设置有与转动架配合的台阶槽,所述压板封堵所述安置台阶上方以限制所述转动架上下运动。
13、作为优选,所述旋翼的外侧设置有防撞梁,所述防撞梁向远离所述旋翼的方向延伸。
14、作为优选,所述飞行控制器上设置有避障摄像头,所述避障摄像头与所述板载计算机相接。
15、作为优选,所述飞行控制器的下部还设置有起落架以对所述飞行控制器在地面进行支撑。
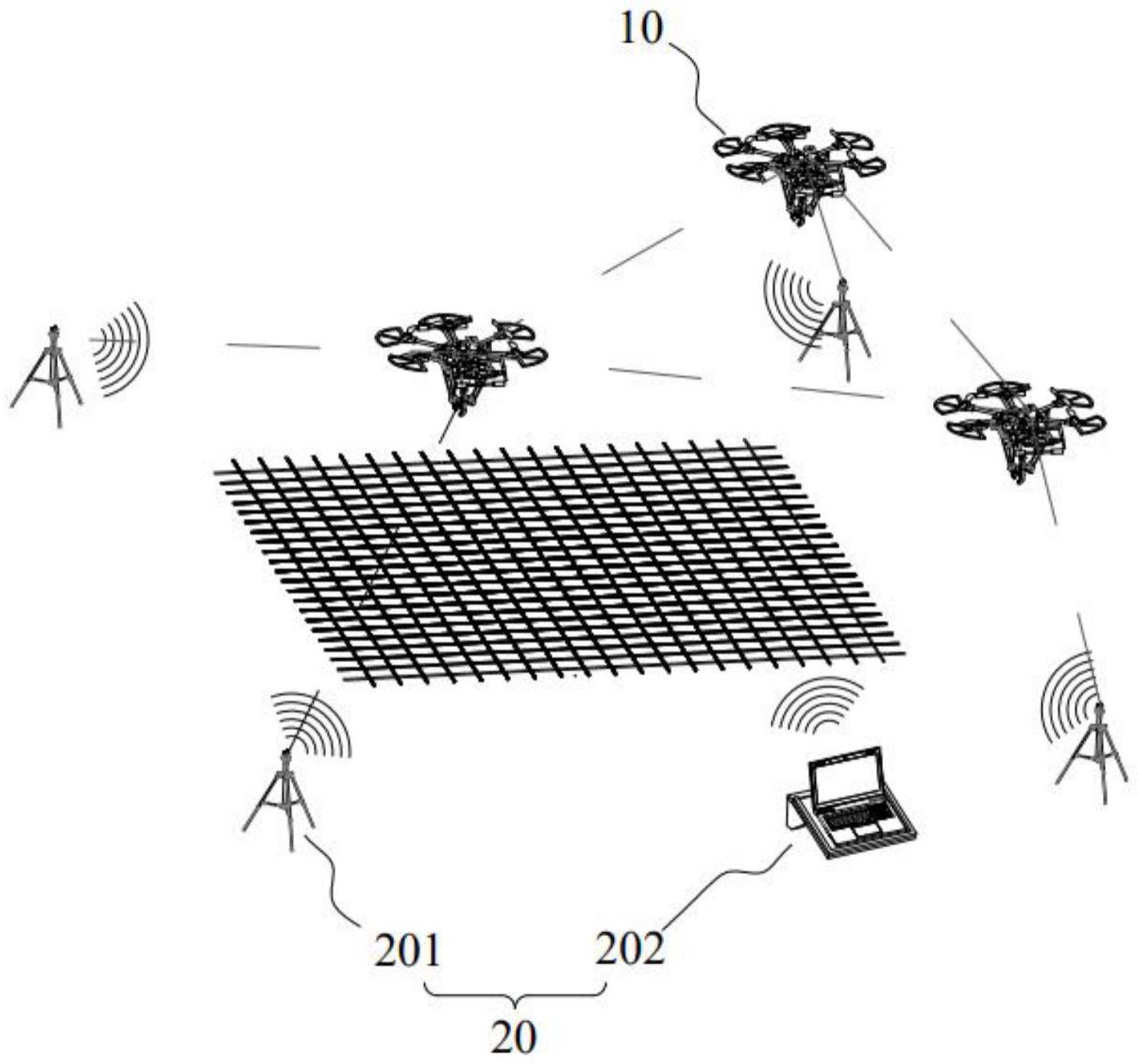
16、作为优选,所述定位站包括若干地面定位块,所述地面定位块能够移动的安置在施工地区以捕捉所述施工地区的钢筋布置的位置数据,所述定位站还包括与所述若干地面定位块还连通的地面控制器以对所述钢筋布置的位置数据进行处理,所述地面控制器连接控制所述板载计算机。
17、本发明的有益效果:
18、通过调整机械组件、识别控制组件以及钢筋捆扎器结合,能够在钢筋捆扎点范围内灵活的布置施工,无须预施工与铺设轨道等设备,配置灵活、成本低;并且能够完成较高位置的绑扎工作,一方面能够减少施工人员的劳动强度、提高安全性,另一方面也能够通过多台飞行控制器的同时操作联合作业,提高施工效率高。
技术特征:
1.空中捆扎机器人系统,其特征在于,包括:
2.根据权利要求1所述的空中捆扎机器人系统,其特征在于,所述调整机械组件(4)包括静平台(42),所述静平台(42)可拆卸的安装在所述飞行控制器(1)的下部,所述并联机械臂(41)设置三组,三组所述并联机械臂(41)的一端均匀周向连接在所述静平台(42)上,所述并联机械臂(41)的另一端连接有动平台(43),所述钢筋捆扎器(3)可旋转的安装在所述动平台(43)上。
3.根据权利要求2所述的空中捆扎机器人系统,其特征在于,所述并联机械臂(41)包括旋转动力部(411)、主动臂(412)和从动臂(413),所述旋转动力部(411)与所述静平台(42)上下转动连接,所述旋转动力部(411)的输出端连接所述主动臂(412)的第一端以驱动所述主动臂(412)相对于所述静平台(42)上下转动,所述主动臂(412)的第二端转动连接所述从动臂(414)的第一端,所述从动臂(414)的第二端与所述动平台(43)转接。
4.根据权利要求3所述的空中捆扎机器人系统,其特征在于,所述静平台(42)的底端设置有动力控制器(44),所述动力控制器(44)连接所述板载计算机(51),所述动力控制器(44)控制所述旋转动力部(411)进行运动。
5.根据权利要求2所述的空中捆扎机器人系统,其特征在于,所述钢筋捆扎器(3)包括绕丝轮(31)、钢丝绑扎头(32)、舵机(33)、绕丝轮固定架(34);所述舵机(33)、所述钢丝绑扎头(32)分别与所述板载计算机(51)连接,所述绕丝轮固定架(34)套置于所述钢丝绑扎头(32)的外部,所述绕丝轮(31)转接在所述绕丝轮固定架(34)上,所述绕丝轮固定架(34)与所述钢丝绑扎头(32)的外部套设有转动架(35),所述舵机(33)设置在所述转动架(35)上,所述舵机(33)的输出端连接有齿轮(36),所述动平台(43)上设置有安装所述钢丝绑扎头(32)的安置孔(431),所述安置孔(431)上设置有与所述齿轮(36)啮合的内齿(432)以使所述转动架(35)与所述动平台(43)互相转动。
6.根据权利要求5所述的空中捆扎机器人系统,其特征在于,所述安置孔(431)内设置有安置台阶(4311),所述转动架(35)置于所述安置台阶(4311)上进行转动,所述动平台(43)上设有压板(37),所述压板(37)上设置有与转动架(35)配合的台阶槽(371),所述压板(37)封堵所述安置台阶(4311)上方以限制所述转动架(35)上下运动。
7.根据权利要求1所述的空中捆扎机器人系统,其特征在于,所述旋翼(2)的外侧设置有防撞梁(6),所述防撞梁(6)向远离所述旋翼(2)的方向延伸。
8.根据权利要求1所述的空中捆扎机器人系统,其特征在于,所述飞行控制器(1)上设置有避障摄像头(7),所述避障摄像头(7)与所述板载计算机(51)相接。
9.根据权利要求1所述的空中捆扎机器人系统,其特征在于,所述飞行控制器(1)的下部还设置有起落架(8)以对所述飞行控制器(1)在地面进行支撑。
10.根据权利要求1所述的空中捆扎机器人系统,其特征在于,所述定位站(20)包括若干地面定位块(201),所述地面定位块(201)能够移动的安置在施工地区以捕捉所述施工地区的钢筋布置的位置数据,所述定位站(20)还包括与若干所述地面定位块(201)连通的地面控制器(202)以对所述钢筋布置的位置数据进行处理,所述地面控制器(202)连接控制所述板载计算机(51)。
技术总结
本发明属于建筑施工技术领域,公开了一种空中捆扎机器人系统,该系统包括无人飞行置,空中捆扎机器人包括飞行控制器;飞行控制器的下部设置有调整机械组件,调整机械组件包括并联机械臂的输出端连接钢筋捆扎器,以对目标钢筋进行捆扎,该系统还具有识别控制组件,识别控制组件包括设置在飞行控制器上的定位模块、钢筋检测摄像头以及板载计算机,板载计算机与外部的定位站信号连接,定位模块和钢筋检测摄像头连接对目标钢筋进行定位和检测。通过上述空中捆扎机器人系统,能够在钢筋捆扎点范围内灵活的布置施工,无须预施工与铺设轨道等设备,配置灵活、成本低;并且能够完成较高位置的绑扎工作,提高安全性,提高施工效率高。
技术研发人员:戴瑜,梁崇煜,卞家能,黄鑫,陆鑫波,黄安琪儿
受保护的技术使用者:中南大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!