一种机器人和运动平台的防碰撞控制系统及方法与流程
本发明涉及防碰撞控制,尤其涉及一种机器人和运动平台的防碰撞控制系统及方法。
背景技术:
1、在自动化产线中,机器人和生产加工检测设备进行逻辑运动交互,通常来说设备具有xyz三个坐标的运动系统,这也必然存在工作空间的重合区域情况。当上述两台机器同时执行运动任务时,在重合的工作空间内存在相互碰撞的风险。在这种情况下,可以通过两台机器的预设逻辑轨迹进行逻辑上的避让控制,以保证运动任务轨迹不发生重合,但是这种模式对设备和系统的稳定要求极高,如果有异常情况出现,很有可能会出现机器人和运动平台碰撞的风险,有鉴于此特提出本发明。
技术实现思路
1、本发明要解决的技术问题是克服现有技术存在的缺陷,本发明提出了一种机器人和运动平台的防碰撞控制方法。
2、为解决上述技术问题,本发明采用的技术方案是:一种机器人和运动平台的防碰撞控制系统及方法,包括:
3、安全监控模块esafebox、机器人、运动平台;
4、所述机器人和所述运动平台的工作空间存在重合区域,所述安全监控模块esafebox,能够与机器人和运动平台实时通信并预防在所述重合区域碰撞;
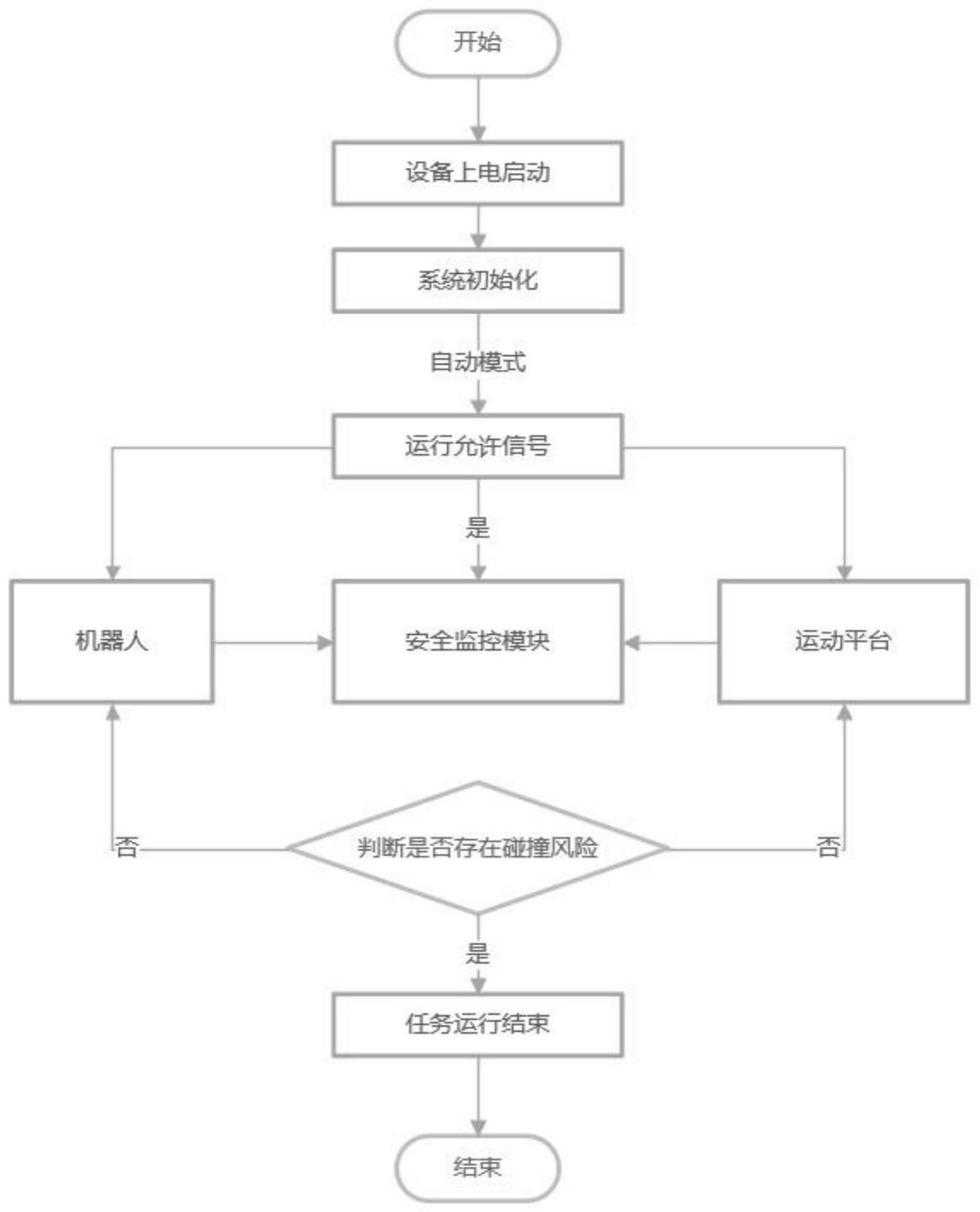
5、所述预防在所述重合区域碰撞方法包括:
6、s1:建立安全监控模块esafebox与机器人和运动平台的实时通信;
7、s2:建立机器人和运动平台的当前运动坐标和下一个运动坐标的通讯点;
8、s3:使所述机器人和所述运动平台运行各自的预设运动任务;
9、s4:当所述机器人和所述运动平台在运行各自的预设运动任务时,安全监控模块esafebox实时接收所述机器人和所述运动平台发送的当前实时运动数据和下一个运动点的数据,安全监控模块esafebox计算结合实时运动数据和即将运动的数据点预判两者的碰撞风险;
10、s5:当所述机器人预判与所述运动平台存在碰撞风险时,安全监控模块esafebox强制终止所述机器人和所述运动平台的运行任务,并触发碰撞警告提醒。
11、进一步地,所述预判两者的碰撞风险的方法包括:
12、s1:所述安全监控模块esafebox将实时分析机器人和运动平台当前运动数据和按照当前数据未来5秒内的运动数据,预判两个硬件的碰撞风险;
13、s2:若按照当前数据未来5秒内的运动数据,两个硬件存在碰撞风险,安全监控模块esafebox将终止当前任务,触发报警模块,从而保证生产现场的安全运动;
14、s3:若按照当前数据未来5秒内的运动数据,两个硬件不存在碰撞风险,机器人和运动平台继续行进执行其预设运动任务,并实时反馈当前运行数据。
15、进一步地,所述机器人和运动平台在行进过程中由安全监控模块esafebox统一计算各自的当前位置机器人和运动平台构成的模型坐标阈位置、预运行点位置机器人和运动平台构成的模型坐标阈位置;
16、所述机器人和运动平台发送的实时数据包括当前机器人和运动平台的运动状态、当前运动坐标域、预运动点坐标域以及运行速度信息;
17、所述安全监控平模块esafebox实时接收所述机器人和运动平台发送的实时运动数据预判两者的碰撞风险包括:根据所述机器人和运动平台双方的当前运动坐标域、后续预运动坐标域以及双方当前的速度信息、加速度信息计算双方当前时刻及双方在未来各个时刻的坐标域位置双方是否有碰撞风险,若所述机器人和运动平台的坐标域重叠即为有碰撞风险。
18、进一步地,所述机器人为关节臂机器人,运动平台为xyz三轴立体运动平台;所述运动平台为立方体包围盒。
19、进一步地,还包括通讯模块,所述通讯模块实现同机器人和运动平台的数据交互,数据存储在计算机中的读存储介质,支持多线程高并发读取,能够实现机器人数据的多线程实时监控能力,同时机器人的编程模块要求按照预设运动轨迹进行最小化切分,并实时指定下一个运动坐标阈位置。
20、进一步地,当机器人和运动平台处于异常状态时,安全监控模块esafebox依然能够实现防止碰撞的能力,由于安全监控模块esafebox的独立运行,和被监控对象的运动逻辑是剥离的,从而可以有效的防止由于被监控对象的误运动而导致的碰撞。
21、一种机器人和运动平台的防碰撞控制系统,包括,
22、机器人;
23、运动平台;
24、通讯模块,所述通讯模块实现同机器人和运动平台的数据交互;
25、安全监控模块esafebox,所述安全监控模块esafebox通过其内设计的控制程序进行预防机器人和运动平台碰撞。
26、与现有技术相比,本发明的有益效果包括:在机器人和运动平台工作空间存在重合区域的情况下,安全监控模块esafebox与机器人和运动平台进行实时通信,基于两台机器的实时运动数据,对两者在后续任务中是否存在会发生碰撞的位置进行预判,提升了预判结果的精准度。如果预判两者不存在碰撞风险,机器人和运动平台均执行各自预设运动任务,一旦预判到碰撞风险,安全监控模块esafebox将强制停止机器人和运动平台的工作任务,并触发告警系统。这样可有效避免碰撞发生,并最大限度保证生产线的设备安全运行。另外,本发明可在不依赖额外传感器的情况下,实现碰撞风险的精准预判,节约了成本,并且当机器人和运动平台两个系统出现异常误运动时,本控制系统依然能够实现防碰撞功能。
技术特征:
1.一种机器人和运动平台的防碰撞控制方法,其特征在于,包括:
2.根据权利要求1所述的一种机器人和运动平台的防碰撞控制方法,其特征在于,所述预判两者的碰撞风险的方法包括:
3.根据权利要求2所述的一种机器人和运动平台的防碰撞控制方法,其特征在于,所述机器人和运动平台在行进过程中由安全监控模块esafebox统一计算各自的当前位置机器人和运动平台构成的模型坐标阈位置、预运行点位置机器人和运动平台构成的模型坐标阈位置;
4.根据权利要求3所述的一种机器人和运动平台的防碰撞控制方法,其特征在于,所述机器人为关节臂机器人,运动平台为xyz三轴立体运动平台;所述运动平台为立方体包围盒。
5.根据权利要求4所述的一种机器人和运动平台的防碰撞控制方法,其特征在于,还包括通讯模块,所述通讯模块实现同机器人和运动平台的数据交互,数据存储在计算机中的读存储介质,支持多线程高并发读取,能够实现机器人数据的多线程实时监控能力,同时机器人的编程模块要求按照预设运动轨迹进行最小化切分,并实时指定下一个运动坐标阈位置。
6.根据权利要求5所述的一种机器人和运动平台的防碰撞控制方法,其特征在于,当机器人和运动平台处于异常状态时,安全监控模块esafebox依然能够实现防止碰撞的能力,由于安全监控模块esafebox的独立运行,和被监控对象的运动逻辑是剥离的,从而可以有效的防止由于被监控对象的误运动而导致的碰撞。
7.根据权利要求1-6任意一项所述的一种机器人和运动平台的防碰撞控制系统,其特征在于,包括:
技术总结
本发明提出了一种机器人和运动平台的防碰撞控制系统及方法,包括:安全监控模块eSafeBox、机器人、运动平台;所述机器人和所述运动平台的工作空间存在重合区域,所述安全监控模块eSafeBox,能够与机器人和运动平台实时通信并预防在所述重合区域碰撞;所述预防在所述重合区域碰撞方法包括:S1:建立安全监控模块eSafeBox与机器人和运动平台的实时通信;S2:建立机器人和运动平台的当前运动坐标和下一个运动坐标的通讯点。一种机器人和运动平台的防碰撞控制系统及方法,可在不依赖额外传感器的情况下,实现碰撞风险的精准预判,节约了成本,并且当机器人和运动平台两个系统出现异常误运动时,本控制系统依然能够实现防碰撞功能。
技术研发人员:李小娜
受保护的技术使用者:李小娜
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!