一种机械手臂及系统的制作方法
本发明涉及水下机器人,具体而言,涉及一种机械手臂及系统。
背景技术:
1、水下机器人常用的机械手臂以液压形式的机械臂结构为主,主要应用于深海和重载型作业。随着水下技术与工程的进步,人们对于机械手臂提出了高性能、高可靠性和高自动化的发展趋势。现有技术下的一些机械手臂通过卡爪机构进行物体夹持,其负载能力较小,且夹持稳定程度较低,难以抵抗较大的冲击力,难以适用于水下作业。
技术实现思路
1、本发明解决的问题是:如何提高机械手臂对于水下作业的适用性。
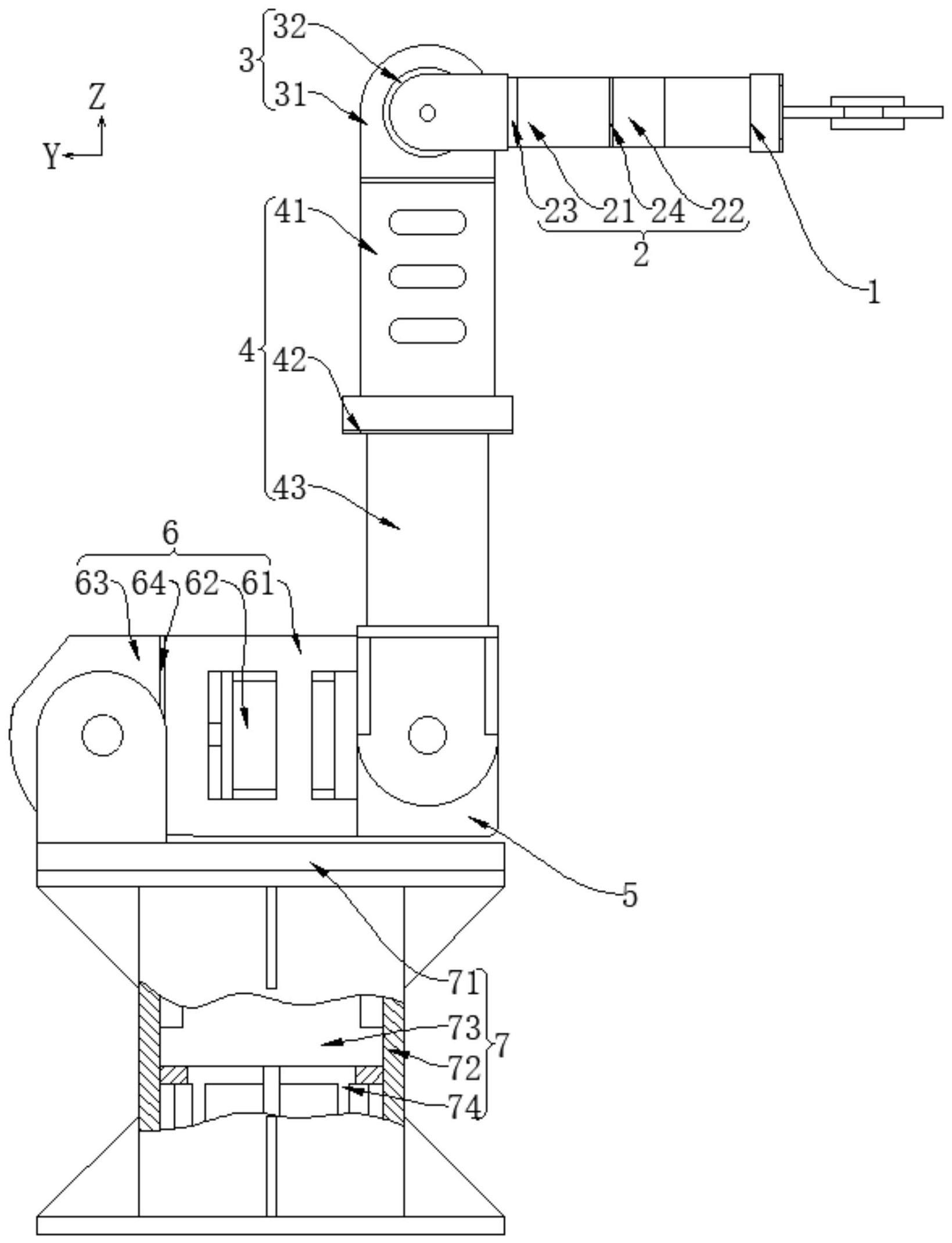
2、为解决上述问题,本发明提供一种机械手臂,包括夹爪部、回转腕部、摆动腕部、回转臂、第一摆动臂、第二摆动臂和回转腰部,所述回转腰部与所述第二摆动臂的一端在竖直面上转动连接,所述第二摆动臂的另一端与所述第一摆动臂的一端在竖直面上转动连接,所述第一摆动臂和所述回转臂各自的中心轴同轴设置,所述第一摆动臂的另一端与所述回转臂绕所述中心轴转动连接,所述摆动腕部的一端与所述回转臂在竖直面上转动连接,所述摆动腕部的另一端与所述回转腕部的一端在竖直面上转动连接,所述夹爪部转动连接于所述回转腕部的另一端。
3、可选地,所述夹爪部包括第一密封盖、第一外壳、第一电机、第二密封盖和夹爪组件,所述第一电机与所述夹爪组件驱动连接,所述第二密封盖套设于所述第一电机,所述第一电机设置于所述第一外壳的内腔中,所述第一密封盖和所述第二密封盖分别与所述第一外壳的两端开口密封连接。
4、可选地,所述回转腕部包括第二外壳、第三外壳、第三密封盖、第二电机、第一输出轴和第四密封盖,所述第二电机与所述摆动腕部驱动连接,所述第一输出轴位于所述第二外壳的内腔中,所述第四密封盖套设于所述第二电机,所述第三密封盖和所述第四密封盖分别与所述第二外壳的两端开口密封连接,所述第四密封盖与所述第一密封盖分别与所述第三外壳的两端开口密封连接,所述第二电机位于所述第三外壳的内腔中。
5、可选地,所述摆动腕部包括第五密封盖、第三电机、第四外壳和第六密封盖,所述第三电机位于所述第四外壳的内腔中,并与所述回转腕部驱动连接,所述第五密封盖和所述第六密封盖分别与所述第四外壳的两端开口密封连接。
6、可选地,所述回转臂包括第五外壳、第四电机、第七密封盖和第六外壳,所述第四电机位于所述第五外壳的内腔中,所述第四电机与所述第七密封盖驱动连接,所述第七密封盖位于所述第五外壳和所述第六外壳之间,并与所述第五外壳和所述第六外壳上相对的开口密封连接,所述第六外壳远离所述第七密封盖的一端装设于所述第四外壳。
7、可选地,第一摆动臂包括第七外壳、第八密封盖、第五电机和第九密封盖,所述第五电机位于所述第七外壳的内腔中,两个所述第八密封盖分别与所述第七外壳的两端开口密封连接,所述第五电机与所述第九密封盖驱动连接,所述第九密封盖与所述第五外壳远离所述第七密封盖的一端密封连接。
8、可选地,第二摆动臂包括第八外壳、第六电机、摆动架和第十密封盖,所述第六电机位于所述第八外壳的内腔中,所述第六电机与所述摆动架驱动连接,所述第十密封盖位于所述摆动架和所述第八外壳之间,并与所述第八外壳密封连接,所述摆动架与所述回转腰部在竖直平面上转动连接,所述第八外壳与远离所述第九密封盖的一个所述第八密封盖密封连接。
9、可选地,回转腰部包括回转座、第九外壳、第七电机、固定底座和环形支撑架,所述环形支撑架一端连接于所述固定底座,另一端连接于所述第七电机,所述第七电机的输出轴与所述固定底座驱动连接,所述第七电机位于所述第九外壳的内腔中,所述第七电机装设于所述回转座,所述回转座与所述摆动架在竖直平面上转动连接。
10、可选地,所述夹爪组件包括指端、第一连杆、第二连杆和腕端,所述第一连杆的驱动机构是通过所述第一电机和齿轮驱动,所述第一连杆的末端是四分之一圆齿轮结构,通过平行结构实现所述指端的张开与合拢。
11、本发明的机械手臂由夹爪部、回转腕部、摆动腕部、回转臂、第一摆动臂、第二摆动臂和回转腰部组成,形成了六自由度机械臂的结构,其结构紧凑,并且通过密封盖的设计,提高了整个结构的密封性能,更适用于水下作业;同时,该夹爪部的结构便于磨损或毁坏时进行更换,降低了设备的维护成本。
12、本发明还提供一种机械手臂系统,包括如上所述的机械手臂,还包括控制元件、通信接口电路、数字转模拟电路、信号放大电路和驱动电路。
13、本发明的机械手臂系统具有上述的机械手臂的所有有益效果,在此不再赘述。
技术特征:
1.一种机械手臂,其特征在于,包括夹爪部(1)、回转腕部(2)、摆动腕部(3)、回转臂(4)、第一摆动臂(5)、第二摆动臂(6)和回转腰部(7),所述回转腰部(7)与所述第二摆动臂(6)的一端在竖直面上转动连接,所述第二摆动臂(6)的另一端与所述第一摆动臂(5)的一端在竖直面上转动连接,所述第一摆动臂(5)和所述回转臂(4)各自的中心轴同轴设置,所述第一摆动臂(5)的另一端与所述回转臂(4)绕所述中心轴转动连接,所述摆动腕部(3)的一端与所述回转臂(4)在竖直面上转动连接,所述摆动腕部(3)的另一端与所述回转腕部(2)的一端在竖直面上转动连接,所述夹爪部(1)转动连接于所述回转腕部(2)的另一端。
2.根据权利要求1所述的机械手臂,其特征在于,所述夹爪部(1)包括第一密封盖(11)、第一外壳(12)、第一电机(13)、第二密封盖(14)和夹爪组件(15),所述第一电机(13)与所述夹爪组件(15)驱动连接,所述第二密封盖(14)套设于所述第一电机(13),所述第一电机(13)设置于所述第一外壳(12)的内腔中,所述第一密封盖(11)和所述第二密封盖(14)分别与所述第一外壳(12)的两端开口密封连接。
3.根据权利要求2所述的机械手臂,其特征在于,所述回转腕部(2)包括第二外壳(21)、第三外壳(22)、第三密封盖(23)、第二电机、第一输出轴和第四密封盖(24),所述第二电机与所述摆动腕部(3)驱动连接,所述第一输出轴位于所述第二外壳(21)的内腔中,所述第四密封盖(24)套设于所述第二电机,所述第三密封盖(23)和所述第四密封盖(24)分别与所述第二外壳(21)的两端开口密封连接,所述第四密封盖(24)与所述第一密封盖(11)分别与所述第三外壳(22)的两端开口密封连接,所述第二电机位于所述第三外壳(22)的内腔中。
4.根据权利要求3所述的机械手臂,其特征在于,所述摆动腕部(3)包括第五密封盖、第三电机、第四外壳(31)和第六密封盖(32),所述第三电机位于所述第四外壳(31)的内腔中,并与所述回转腕部(2)驱动连接,所述第五密封盖和所述第六密封盖(32)分别与所述第四外壳(31)的两端开口密封连接。
5.根据权利要求4所述的机械手臂,其特征在于,所述回转臂(4)包括第五外壳(41)、第四电机、第七密封盖(42)和第六外壳(43),所述第四电机位于所述第五外壳(41)的内腔中,所述第四电机与所述第七密封盖(42)驱动连接,所述第七密封盖(42)位于所述第五外壳(41)和所述第六外壳(43)之间,并与所述第五外壳(41)和所述第六外壳(43)上相对的开口密封连接,所述第六外壳(43)远离所述第七密封盖(42)的一端装设于所述第四外壳(31)。
6.根据权利要求5所述的机械手臂,其特征在于,第一摆动臂(5)包括第七外壳、第八密封盖、第五电机和第九密封盖,所述第五电机位于所述第七外壳的内腔中,两个所述第八密封盖分别与所述第七外壳的两端开口密封连接,所述第五电机与所述第九密封盖驱动连接,所述第九密封盖与所述第五外壳(41)远离所述第七密封盖(42)的一端密封连接。
7.根据权利要求6所述的机械手臂,其特征在于,第二摆动臂(6)包括第八外壳(61)、第六电机(62)、摆动架(63)和第十密封盖(64),所述第六电机(62)位于所述第八外壳(61)的内腔中,所述第六电机(62)与所述摆动架(63)驱动连接,所述第十密封盖(64)位于所述摆动架(63)和所述第八外壳(61)之间,并与所述第八外壳(61)密封连接,所述摆动架(63)与所述回转腰部(7)在竖直平面上转动连接,所述第八外壳(61)与远离所述第九密封盖的一个所述第八密封盖密封连接。
8.根据权利要求7所述的机械手臂,其特征在于,回转腰部(7)包括回转座(71)、第九外壳(72)、第七电机(73)、固定底座和环形支撑架(74),所述环形支撑架(74)一端连接于所述固定底座,另一端连接于所述第七电机(73),所述第七电机(73)的输出轴与所述固定底座驱动连接,所述第七电机(73)位于所述第九外壳(72)的内腔中,所述第七电机(73)装设于所述回转座(71),所述回转座(71)与所述摆动架(63)在竖直平面上转动连接。
9.根据权利要求2所述的机械手臂,其特征在于,所述夹爪组件(15)包括指端(151)、第一连杆(152)、第二连杆(153)和腕端(154),所述第一连杆(152)的驱动机构是通过所述第一电机(13)和齿轮驱动,所述第一连杆(152)的末端是四分之一圆齿轮结构,通过平行结构实现所述指端(151)的张开与合拢。
10.一种机械手臂系统,其特征在于,包括如权利要求1至9任一项所述的机械手臂,还包括控制元件、通信接口电路、数字转模拟电路、信号放大电路和驱动电路。
技术总结
本发明提供一种机械手臂及系统,包括夹爪部、回转腕部、摆动腕部、回转臂、第一摆动臂、第二摆动臂和回转腰部,回转腰部与第二摆动臂的一端在竖直面上转动连接,第二摆动臂的另一端与第一摆动臂的一端在竖直面上转动连接,第一摆动臂和回转臂各自的中心轴同轴设置,第一摆动臂的另一端与回转臂绕中心轴转动连接,摆动腕部的一端与回转臂在竖直面上转动连接,摆动腕部的另一端与回转腕部的一端在竖直面上转动连接,夹爪部转动连接于回转腕部的另一端。由夹爪部、回转腕部、摆动腕部、回转臂、第一摆动臂、第二摆动臂和回转腰部形成了六自由度机械臂的结构,结构紧凑,并且通过密封盖的设计,提高了整个结构的密封性能,更适用于水下作业。
技术研发人员:吴海京,李学成,朱晓宇,阮文辉,聂国平,卿太彪,施炎武,蔡东海
受保护的技术使用者:中海辉固地学服务(深圳)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!