双检测结构执行器及机器人的制作方法
本发明涉及机器人,尤其涉及一种双检测结构执行器及机器人。
背景技术:
1、在智能机器人领域,通常使用执行器为机器人的各关节提供动力,以使各关节可做相应的动作。然而,目前所使用的执行器通常是通过电池进行多圈记录,如果断电后将无法记录转动信息。
技术实现思路
1、鉴于上述问题,提出了本发明实施例,以便提供一种解决上述问题的双检测结构执行器及机器人。
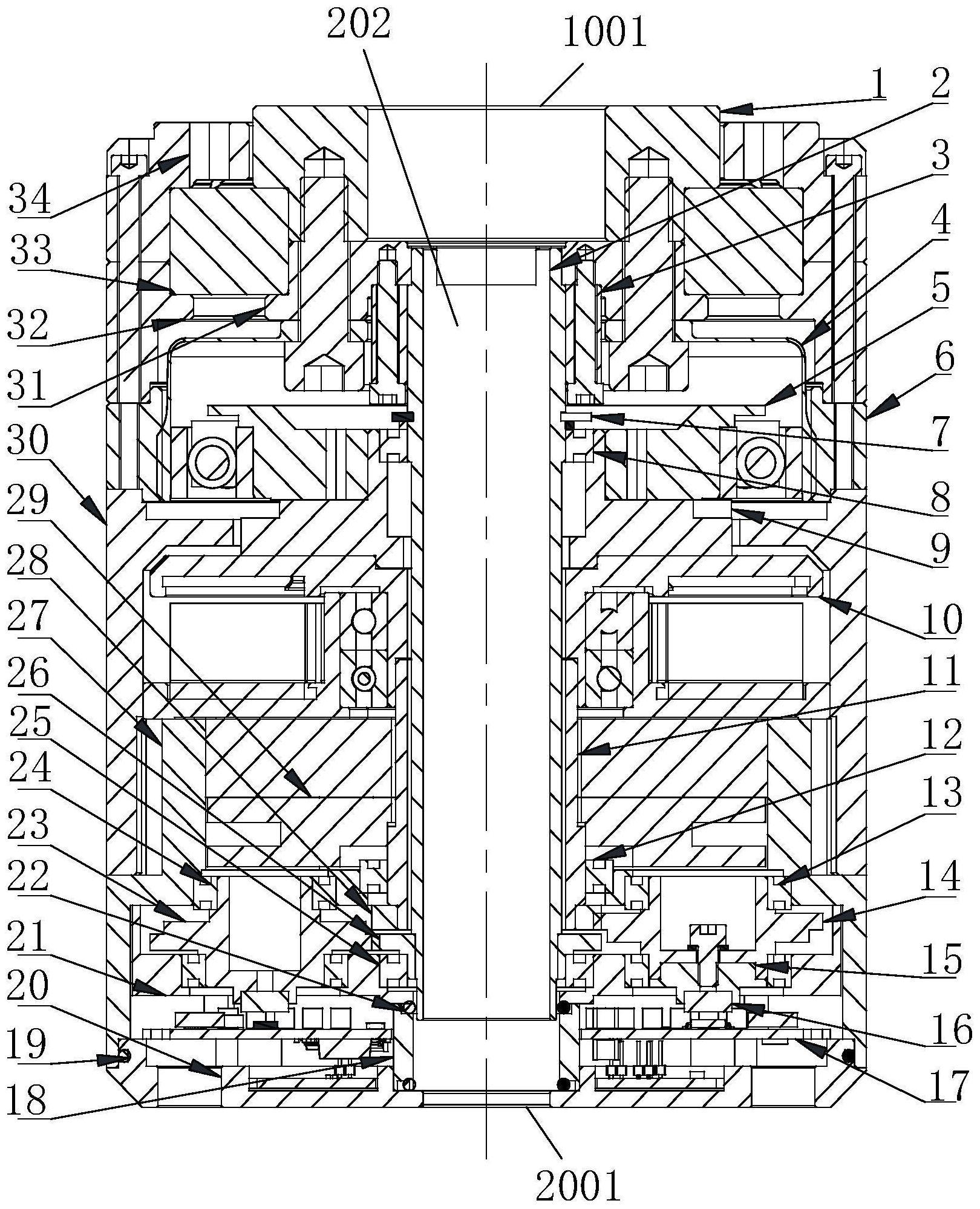
2、在本发明的一个实施例中,提供了一种双检测结构执行器,包括:
3、驱动单元,包括驱动电机,所述驱动单元的中部穿设有随动轴,所述随动轴上固定有输出端输入齿轮;
4、输出单元,与所述随动轴传动连接;
5、转子连动轴,所述转子连动轴可转动套设在所述随动轴上,所述转子连动轴的轴向一端与所述驱动电机驱动连接,所述转子连动轴的周向固定有电机端输入齿轮;
6、输出端检测齿轮,所述输出端检测齿轮可转动设置在所述随动轴径向方向的一侧,并与所述输出端输入齿轮传动连接;
7、电机端检测齿轮,所述电机端检测齿轮可转动设置在所述随动轴径向方向的另一侧,并与所述电机端输入齿轮传动连接。
8、在一些实施例中,还包括检测安装座,所述检测安装座上设有第一转动腔、第二转动腔及第三转动腔;
9、所述检测安装座通过第二转动腔套设于所述随动轴的周向外周,所述输出端输入齿轮及所述电机端输入齿轮可转动设置在所述第二转动腔内;
10、所述输出端检测齿轮可转动设置在所述第一转动腔内;
11、所述电机端检测齿轮可转动设置在所述第三转动腔内。
12、在一些实施例中,所述电机端检测齿轮的轴向两端分别设有第三轴承件,所述电机端检测齿轮的一端通过其上的所述第三轴承件与所述第三转动腔可转动连接;
13、所述输出端检测齿轮的轴向两端分别设有第四轴承件,所述输出端检测齿轮的一端通过其上的所述第四轴承件与所述第一转动腔可转动连接;
14、所述随动轴上设有第五轴承件,所述随动轴通过所述第五轴承件与所述第二转动腔可转动连接。
15、在一些实施例中,所述随动轴至少部分伸出于所述转子连动轴之外,所述输出端输入齿轮固定设置在所述随动轴伸出所述转子连动轴之外的部分上,且所述输出端输入齿轮的直径与所述电机端输入齿轮的直径不同。
16、在一些实施例中,所述输出端检测齿轮上及所述电机端检测齿轮上分别设有磁铁组件;
17、所述执行器还包括驱动板,所述驱动板环设于所述随动轴,所述驱动板上设有配合所述磁铁组件使用的编码器。
18、在一些实施例中,所述磁铁组件包括磁铁座及编码磁铁;所述磁铁座与所述输出端检测齿轮或所述电机端检测齿轮连接,所述编码磁铁固定设置在磁铁座上。
19、在一些实施例中,还包括制动器组件,所述制动器组件包括制动器外壳及可活动设置在所述制动器外壳内的制动器,所述制动器外壳与所述驱动单元连接,所述制动器环设于所述转子连动轴的外周。
20、在一些实施例中,所述驱动电机的转子上设有第三嵌合连接部;
21、所述转子连动轴与所述驱动电机连接的一端上设有配合所述第三嵌合连接部使用的第四嵌合连接部,所述转子连动轴通过第四嵌合连接部与所述第三嵌合连接部嵌合连接以实现周向定位。
22、在一些实施例中,所述第三嵌合连接部及所述第四嵌合连接部中的一个为卡槽结构,另一个为与所述卡槽结构配合使用的凸起结构。
23、相应地,本发明实施例还提供了一种机器人,所述机器人包括如上述中所述的执行器。
24、本发明实施例提供的技术方案,通过输出端检测齿轮及电机端检测齿轮可分别配合不同的编码器检测输出单元及驱动电机的转动信息,从而对驱动电机和输出单元的转动位置实时闭环控制。
技术特征:
1.一种双检测结构执行器,其特征在于,包括:
2.根据权利要求1所述的双检测结构执行器,其特征在于,还包括检测安装座,所述检测安装座上设有第一转动腔、第二转动腔及第三转动腔;
3.根据权利要求2所述的双检测结构执行器,其特征在于,所述电机端检测齿轮的轴向两端分别设有第三轴承件,所述电机端检测齿轮的一端通过其上的所述第三轴承件与所述第三转动腔可转动连接;
4.根据权利要求1至3中任一项所述的双检测结构执行器,其特征在于,所述随动轴至少部分伸出于所述转子连动轴之外,所述输出端输入齿轮固定设置在所述随动轴伸出所述转子连动轴之外的部分上,且所述输出端输入齿轮的直径与所述电机端输入齿轮的直径不同。
5.根据权利要求1至3中任一项所述的双检测结构执行器,其特征在于,所述输出端检测齿轮上及所述电机端检测齿轮上分别设有磁铁组件;
6.根据权利要求5所述的双检测结构执行器,其特征在于,所述磁铁组件包括磁铁座及编码磁铁;所述磁铁座与所述输出端检测齿轮或所述电机端检测齿轮连接,所述编码磁铁固定设置在磁铁座上。
7.根据权利要求1至3中任一项所述的双检测结构执行器,其特征在于,还包括制动器组件,所述制动器组件包括制动器外壳及可活动设置在所述制动器外壳内的制动器,所述制动器外壳与所述驱动单元连接,所述制动器环设于所述转子连动轴的外周。
8.根据权利要求1至3中任一项所述的双检测结构执行器,其特征在于,所述驱动电机的转子上设有第三嵌合连接部;
9.根据权利要求8所述的双检测结构执行器,其特征在于,所述第三嵌合连接部及所述第四嵌合连接部中的一个为卡槽结构,另一个为与所述卡槽结构配合使用的凸起结构。
10.一种机器人,其特征在于:所述机器人包括权利要求1至权利要求9中任一项所述的执行器。
技术总结
本发明实施例提供一种执行器及机器人,其中,执行器包括:驱动单元,包括驱动电机,驱动单元的中部穿设有随动轴,随动轴上固定有输出端输入齿轮;输出单元,与随动轴传动连接;转子连动轴,转子连动轴可转动套设在随动轴上,转子连动轴的轴向一端与驱动电机驱动连接,转子连动轴的周向固定有电机端输入齿轮;输出端检测齿轮,输出端检测齿轮可转动设置在随动轴径向方向的一侧,并与输出端输入齿轮传动连接;电机端检测齿轮,电机端检测齿轮可转动设置在随动轴径向方向的另一侧,并与电机端输入齿轮传动连接。本发明实施例提供的技术方案,通过输出端检测齿轮及电机端检测齿轮可分别配合不同的编码器检测输出单元及驱动电机的转动信息。
技术研发人员:罗程,刘猛,王林泉,刘紫蟠,鲁浩浩,黄晓庆
受保护的技术使用者:达闼机器人股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!