一种变电站支柱绝缘子除污机器人及其除污方法与流程
本发明涉及变电站支柱绝缘子除污,尤其涉及一种变电站支柱绝缘子除污机器人及其除污方法。
背景技术:
1、变电站通过把一些设备组装起来,以切断或接通、调整或改变电压,在整个电力系统中,变电站是输电系统和配电系统的集结点,是电力系统的重要组成部分。支柱绝缘子串是变电站的重要组成部分,其主要功能能够保持带电体与接地体机械相连而电气绝缘,其安全稳定运行会直接影响到整个电力系统的运行状态。然而,支柱绝缘子串长期服役于恶劣的自然环境下,大气中的粉尘、鸟粪等污染会附着在支柱绝缘子盘面上,日积月累就形成一层污染层,严重影响绝缘子串的绝缘和电气性能,甚至会导致“污闪”的电网事故的发生,为防止绝缘子串“污闪”的发生,最根本的方法就是定期对绝缘子盘面进行除污和清洗作业。当前,绝缘子串除污和清洗的方法有人工断电情况下的清扫、人工带电情况下的清扫、人工带电水冲洗等等,然而,变电站分布广泛,支柱绝缘子众多,断电除污作业会对国民经济和居民生活造成影响,且人工作业方式消耗大量人力、物力,更重要的是人工高空除污危险性大。因此,亟需一种能够对变电站支柱绝缘子进行除污的作业机器人以提高除污效果和安全性。
技术实现思路
1、本发明要解决的技术问题是克服现有技术的不足,提供一种提高作业效率和作业效果以及安全性高的的变电站支柱绝缘子除污机器人及其除污方法。
2、为解决上述技术问题,本发明采用以下技术方案:
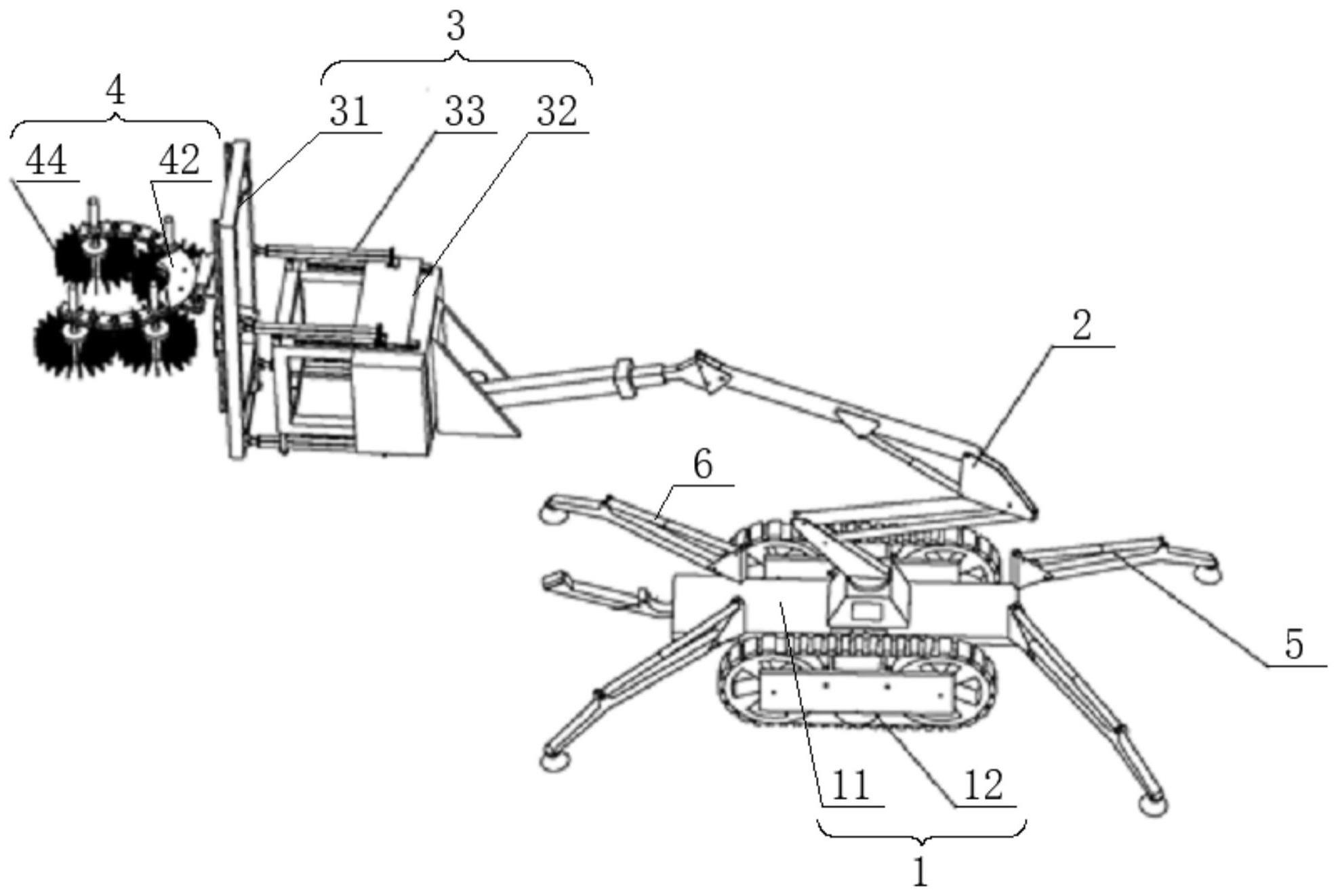
3、一种变电站支柱绝缘子除污机器人,包括移动装置、多自由度机械臂、多自由度运动机构、清洗机构和控制模块,所述多自由度机械臂的一端安装在移动装置上,所述多自由度运动机构安装在多自由度机械臂的另一端,所述清洗机构装设于多自由度运动机构上,所述移动装置、多自由度机械臂、多自由度运动机构和清洗机构均与控制模块信号连接。
4、作为上述技术方案的进一步改进:
5、所述清洗机构包括安装座和两个弧形架,所述安装座装设于多自由度运动机构上,两个所述弧形架的一端对称铰接在安装座上,所述安装座上设有用于驱动两个弧形架张合的张合驱动组件,各所述弧形架上均设有至少两个沿弧长方向间隔布置的毛刷组件,所述张合驱动组件和毛刷组件均与控制模块信号连接。
6、所述毛刷组件包括毛刷和电机,所述电机安装在弧形架上,所述毛刷与电机的驱动端连接,所述电机与控制模块信号连接。
7、所述多自由度运动机构包括安装架、连接座和平移摆动驱动组件,所述连接座安装在多自由度机械臂上,所述安装架通过平移摆动驱动组件可平移和摆动地设置在连接座上,所述清洗机构装设于安装架上,所述平移摆动驱动组件与控制模块信号连接。
8、所述平移摆动驱动组件包括两排间隔布置的伸缩驱动件,各所述伸缩驱动件均固定在连接座上并与控制模块信号连接,且各伸缩驱动件的伸缩端均与安装架铰接。
9、所述安装架上滑设有移动座和用于驱动移动座移动的移动驱动组件,所述清洗机构装设于移动座上,所述移动驱动组件与控制模块信号连接。
10、所述移动座的移动方向与伸缩驱动件的伸缩方向垂直。
11、所述移动装置包括移动底座和设于移动底座底部的履带行走机构,所述多自由度机械臂安装在移动底座上,所述履带行走机构与控制模块信号连接。
12、所述移动底座的四角处均铰接有支撑腿以及用于驱动支撑腿上下摆动调节的摆动驱动件,所述摆动驱动件与控制模块信号连接。
13、一种变电站支柱绝缘子除污方法,采用上述的变电站支柱绝缘子除污机器人进行,包括如下步骤:
14、s1、移动装置接收控制模块的信号指令移动至预定的支柱绝缘子;
15、s2、多自由度机械臂和多自由度运动机构接收控制模块的信号指令协同运动,将清洗机构运送到支柱绝缘子的清洗部位;
16、s3、清洗机构接收控制模块的信号指令启动,同时多自由度机械臂和/或多自由度运动机构接收控制模块的信号指令使清洗机构由上往下对绝缘子进行清洗。
17、与现有技术相比,本发明的优点在于:
18、本发明的变电站支柱绝缘子除污机器人,清洗机构通过多自由度机械臂和多自由度运动机构协同带动,便于运动至预定位置,便于精准定位到支柱绝缘子的清洗部位。相对人工作业,提高了作业效率和作业效果,并且安全性高。
19、本发明的变电站支柱绝缘子除污方法,清洗机构通过多自由度机械臂和多自由度运动机构协同带动,便于运动至预定位置,便于精准定位到支柱绝缘子的清洗部位。相对人工作业,提高了作业效率和作业效果,并且安全性高。清洗机构由上往下对绝缘子进行清洗,清洗效果好。
技术特征:
1.一种变电站支柱绝缘子除污机器人,其特征在于:包括移动装置(1)、多自由度机械臂(2)、多自由度运动机构(3)、清洗机构(4)和控制模块,所述多自由度机械臂(2)的一端安装在移动装置(1)上,所述多自由度运动机构(3)安装在多自由度机械臂(2)的另一端,所述清洗机构(4)装设于多自由度运动机构(3)上,所述移动装置(1)、多自由度机械臂(2)、多自由度运动机构(3)和清洗机构(4)均与控制模块信号连接。
2.根据权利要求1所述的变电站支柱绝缘子除污机器人,其特征在于:所述清洗机构(4)包括安装座(41)和两个弧形架(42),所述安装座(41)装设于多自由度运动机构(3)上,两个所述弧形架(42)的一端对称铰接在安装座(41)上,所述安装座(41)上设有用于驱动两个弧形架(42)张合的张合驱动组件(43),各所述弧形架(42)上均设有至少两个沿弧长方向间隔布置的毛刷组件(44),所述张合驱动组件(43)和毛刷组件(44)均与控制模块信号连接。
3.根据权利要求2所述的变电站支柱绝缘子除污机器人,其特征在于:所述毛刷组件(44)包括毛刷(441)和电机(442),所述电机(442)安装在弧形架(42)上,所述毛刷(441)与电机(442)的驱动端连接,所述电机(442)与控制模块信号连接。
4.根据权利要求1所述的变电站支柱绝缘子除污机器人,其特征在于:所述多自由度运动机构(3)包括安装架(31)、连接座(32)和平移摆动驱动组件(33),所述连接座(32)安装在多自由度机械臂(2)上,所述安装架(31)通过平移摆动驱动组件(33)可平移和摆动地设置在连接座(32)上,所述清洗机构(4)装设于安装架(31)上,所述平移摆动驱动组件(33)与控制模块信号连接。
5.根据权利要求4所述的变电站支柱绝缘子除污机器人,其特征在于:所述平移摆动驱动组件(33)包括两排间隔布置的伸缩驱动件(331),各所述伸缩驱动件(331)均固定在连接座(32)上并与控制模块信号连接,且各伸缩驱动件(331)的伸缩端均与安装架(31)铰接。
6.根据权利要求5所述的变电站支柱绝缘子除污机器人,其特征在于:所述安装架(31)上滑设有移动座(311)和用于驱动移动座(311)移动的移动驱动组件(312),所述清洗机构(4)装设于移动座(311)上,所述移动驱动组件(312)与控制模块信号连接。
7.根据权利要求6所述的变电站支柱绝缘子除污机器人,其特征在于:所述移动座(311)的移动方向与伸缩驱动件(331)的伸缩方向垂直。
8.根据权利要求1至7中任一项所述的变电站支柱绝缘子除污机器人,其特征在于:所述移动装置(1)包括移动底座(11)和设于移动底座(11)底部的履带行走机构(12),所述多自由度机械臂(2)安装在移动底座(11)上,所述履带行走机构(12)与控制模块信号连接。
9.根据权利要求8所述的变电站支柱绝缘子除污机器人,其特征在于:所述移动底座(11)的四角处均铰接有支撑腿(5)以及用于驱动支撑腿(5)上下摆动调节的摆动驱动件(6),所述摆动驱动件(6)与控制模块信号连接。
10.一种变电站支柱绝缘子除污方法,其特征在于,采用权利要求1至9中任一项所述的变电站支柱绝缘子除污机器人进行,包括如下步骤:
技术总结
本发明公开了一种变电站支柱绝缘子除污机器人,包括移动装置、多自由度机械臂、多自由度运动机构、清洗机构和控制模块,多自由度机械臂的一端安装在移动装置上,多自由度运动机构安装在多自由度机械臂的另一端,清洗机构装设于多自由度运动机构上,移动装置、多自由度机械臂、多自由度运动机构和清洗机构均与控制模块信号连接。还公开了一种变电站支柱绝缘子除污方法,包括:移动装置接收控制模块的信号指令移动至预定的支柱绝缘子;多自由度机械臂和多自由度运动机构协同运动,将清洗机构运送到支柱绝缘子的清洗部位;清洗机构启动,由上往下对绝缘子进行清洗。本变电站支柱绝缘子除污机器人及其除污方法提高作业效率和作业效果以及安全性高。
技术研发人员:严宇,周云雅,曾昭强,王立德,于艺盛,江维,李晓武,梁运华,肖奕,陈昌雷,周展帆,张超峰,罗惠钟
受保护的技术使用者:国网湖南省电力有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!