机器人关节检测方法、装置、传感器设备和存储介质与流程
本申请涉及计算机,特别是涉及一种机器人关节检测方法、装置、传感器设备和存储介质。
背景技术:
1、随着计算机技术的发展,可运动的机器人在生产和生活中的应用越来越广泛,然而,机器人的运动需要靠关节的活动,所以为了保证机器人的正常工作,需要定期对机器人关节的健康情况进行检测。
2、目前,机器人关节健康检测是通过在机器人关节处加装无线振动传感器来采集机器人运行过程中的振动信号数据,进而分析机器人关节的健康程度,但由于通用的无线振动传感器是基于预设的时间间隔进行振动信号采样的,所以采样振动信号时机器人关节的运动状态可能不同,由于不同运动状态下,机器人关节动作之间的切换、关节加速、减速和匀速等均不同,因此,存在无法区分机器人关节的运行状态,导致对机器人关节健康监测准确率较低的问题。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够提高机器人检测准确率的机器人关节检测方法、装置、传感器设备和存储介质。
2、第一方面,本申请提供了一种机器人关节检测方法。所述方法包括:
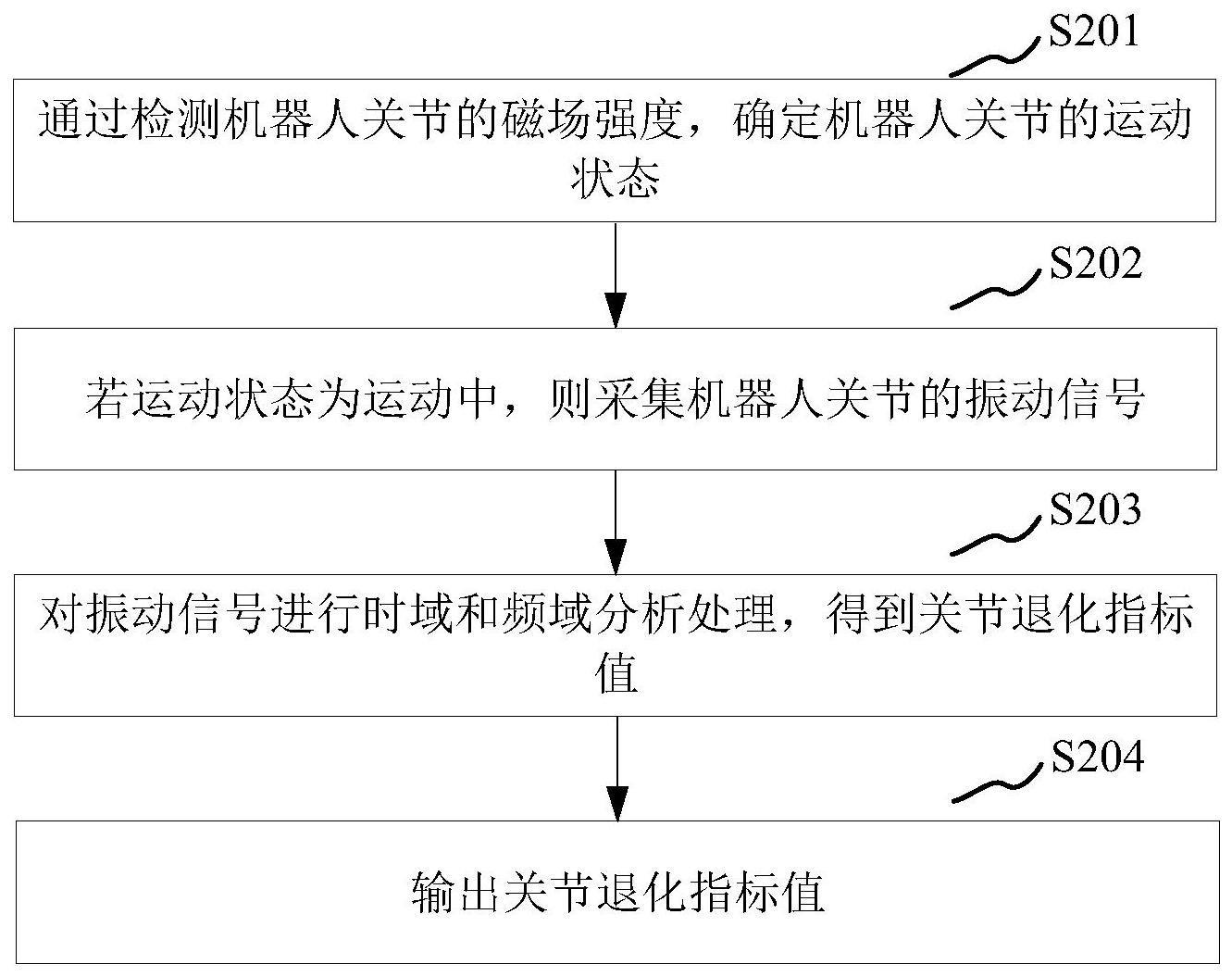
3、通过检测机器人关节的磁场强度,确定机器人关节的运动状态;
4、若运动状态为运动中,则采集机器人关节的振动信号;
5、对振动信号进行时域和频域分析处理,得到关节退化指标值;
6、输出关节退化指标值;其中,关节退化指标值用于检测机器人关节是否存在故障。
7、在其中一个实施例中,通过检测机器人关节的磁场强度,确定机器人关节的运动状态,包括:
8、通过磁场检测元件,采集机器人关节上安装的磁铁产生的磁场强度;
9、根据磁场强度与磁场强度阈值之间的大小关系,确定机器人关节的运动状态。
10、在其中一个实施例中,对振动信号进行时域和频域分析处理,得到关节退化指标值,包括:
11、对振动信号进行时域分析处理,得到关节退化指标值中的时域退化指标值,其中,时域退化指标值包括振动加速度峰值、振动速度、振动峭度中的至少一种;
12、对振动信号进行频域分析处理,得到关节退化指标值中的频域退化指标值,其中,频域退化指标值包括转频幅值、二倍频幅值、调制频率和调制频率幅值中的至少一种。
13、在其中一个实施例中,对振动信号进行时域分析处理,得到关节退化指标值中的时域退化指标值,包括如下至少一种:
14、将振动信号划分为至少两组,根据每组振动信号的最大信号值,确定关节退化指标值中的振动加速度峰值;
15、根据振动信号,确定趋势项,并根据振动信号、趋势项和初始振动速度,确定关节退化指标值中的振动速度;
16、根据振动信号,确定振动标准方差和振动平均值,并根据振动标准方差和振动平均值,确定关节退化指标值中的振动峭度。
17、在其中一个实施例中,对振动信号进行频域分析处理,得到关节退化指标值中的频域退化指标值,包括如下至少一种:
18、对振动信号进行快速傅里叶变换,得到关节退化指标值中的转频幅值和二倍频幅值;
19、确定振动信号的希尔伯特变换对,并根据振动信号和振动信号的希尔伯特变换对构建解析信号,求解解析信号的包络谱,得到关节退化指标值中的调制频率和调制频率幅值。
20、在其中一个实施例中,求解解析信号的包络谱,得到关节退化指标值中的调制频率和调制频率幅值,包括:
21、对解析信号进行求模处理,得到解析信号的包络;
22、对解析信号的包络进行低通滤波处理,得低通滤波后的包络
23、对低通滤波后的包络进行快速傅里叶处理,得到包括谱;
24、根据包络谱,确定关节退化指标值中的调制频率和调制频率幅值。
25、第二方面,本申请还提供了一种机器人关节检测装置。所述装置包括:
26、接近感应模块,用于通过检测机器人关节的磁场强度,确定机器人关节的运动状态;
27、信号采集模块,用于若运动状态为运动中,则采集机器人关节的振动信号;
28、振动检测模块,用于对振动信号进行时域和频域分析处理,得到关节退化指标值;
29、无线传输模块,用于输出关节退化指标值;其中,关节退化指标值用于检测机器人关节是否存在故障。
30、第三方面,本申请还提供了一种传感器设备。所述传感器设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
31、通过检测机器人关节的磁场强度,确定机器人关节的运动状态;
32、若运动状态为运动中,则采集机器人关节的振动信号;
33、对振动信号进行时域和频域分析处理,得到关节退化指标值;
34、输出关节退化指标值;其中,关节退化指标值用于检测机器人关节是否存在故障。
35、第四方面,本申请还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
36、通过检测机器人关节的磁场强度,确定机器人关节的运动状态;
37、若运动状态为运动中,则采集机器人关节的振动信号;
38、对振动信号进行时域和频域分析处理,得到关节退化指标值;
39、输出关节退化指标值;其中,关节退化指标值用于检测机器人关节是否存在故障。
40、第五方面,本申请还提供了一种计算机程序产品。所述计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现以下步骤:
41、通过检测机器人关节的磁场强度,确定机器人关节的运动状态;
42、若运动状态为运动中,则采集机器人关节的振动信号;
43、对振动信号进行时域和频域分析处理,得到关节退化指标值;
44、输出关节退化指标值;其中,关节退化指标值用于检测机器人关节是否存在故障。
45、上述机器人关节检测方法、装置、传感器设备和存储介质,通过检测机器人关节的磁场强度,确定机器人关节的运动状态,若运动状态为运动中,则采集机器人关节的振动信号,对振动信号进行时域和频域分析处理,得到关节退化指标值,输出关节退化指标值。本方案引入磁场强度可以更准确的确定机器人关节的运动状态,便于后续采集同一运动状态的关节退化指标值进行机器人关节的检测,避免了因机器人关节运动状态不同导致定时采集到的关节退化指标值无法进行对比检测的问题,提高了机器人关节检测的精确性,此外,本方案在对采集到的机器人关节的振动信号进行分析时,同时进行时域和频域分析处理,使得得到的关节退化指标值更精确,进一步提高了机器人关节检测的准确率。
技术特征:
1.一种机器人关节检测方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述通过检测机器人关节的磁场强度,确定所述机器人关节的运动状态,包括:
3.根据权利要求1所述的方法,其特征在于,所述对所述振动信号进行时域和频域分析处理,得到关节退化指标值,包括:
4.根据权利要求3所述的方法,其特征在于,所述对所述振动信号进行时域分析处理,得到关节退化指标值中的时域退化指标值,包括如下至少一种:
5.根据权利要求3所述的方法,其特征在于,所述对所述振动信号进行频域分析处理,得到所述关节退化指标值中的频域退化指标值,包括如下至少一种:
6.根据权利要求5所述的方法,其特征在于,所述求解所述解析信号的包络谱,得到所述关节退化指标值中的调制频率和调制频率幅值,包括:
7.一种机器人关节检测装置,其特征在于,所述装置包括:
8.一种传感器设备,包括存储器和处理器,所述存储器存储有计算机程序,所述传感器设备固定安装于待检测的机器人关节附近的预设位置处,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至6中任一项所述的方法的步骤。
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至6中任一项所述的方法的步骤。
10.一种计算机程序产品,包括计算机程序,其特征在于,该计算机程序被处理器执行时实现权利要求1至6中任一项所述的方法的步骤。
技术总结
本申请涉及一种机器人关节检测方法、装置、传感器设备和存储介质。所述方法包括:通过检测机器人关节的磁场强度,确定所述机器人关节的运动状态,若所述运动状态为运动中,则采集所述机器人关节的振动信号,对所述振动信号进行时域和频域分析处理,得到关节退化指标值,输出所述关节退化指标值;其中,所述关节退化指标值用于检测所述机器人关节是否存在故障。采用本方法能够引入磁场强度可以更准确的确定机器人关节的运动状态,便于后续采集同一运动状态的关节退化指标值进行机器人关节的检测,同时,得到更精确的关节退化指标值,进一步提高了机器人关节检测的准确率。
技术研发人员:周健,王吉,莫文安,丁小健,梁超,王远航,孙立军,唐敬,陆树汉
受保护的技术使用者:中国电子产品可靠性与环境试验研究所((工业和信息化部电子第五研究所)(中国赛宝实验室))
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!