一种具有制动保持功能的模切机动平台位移伺服调整机构
本发明涉及模切机,特别涉及一种具有制动保持功能的模切机动平台位移伺服调整机构。
背景技术:
1、印刷行业中纸张模切机的动平台模切压力伺服调节是智能模切机的一项关键技术,目前主要通过动平台位移调整机构来实现调节。传统模切机依靠人工调节或控制伺服电机的转角量来调节,难以准确反馈复杂工况下的模切动平台位移调整量,调整后的模切压力的精准度往往只能靠测量模切出的纸张来检验,因此无法做到快速、精准的调整;此外,在动平台位移调整后动力传递系统没有安全可靠的制动保持机构,当模切机运行时压力瞬间增大外加机器的震动,会出现动平台负位移,导致动平台位移调整的实际结果与预期结果存在偏差。
技术实现思路
1、本发明的目的在于,提供一种具有制动保持功能的模切机动平台位移伺服调整机构。本发明为模切装置的动平台位移调整提供了一种调整机构,本发明具有精准调节和稳定保持的优点。
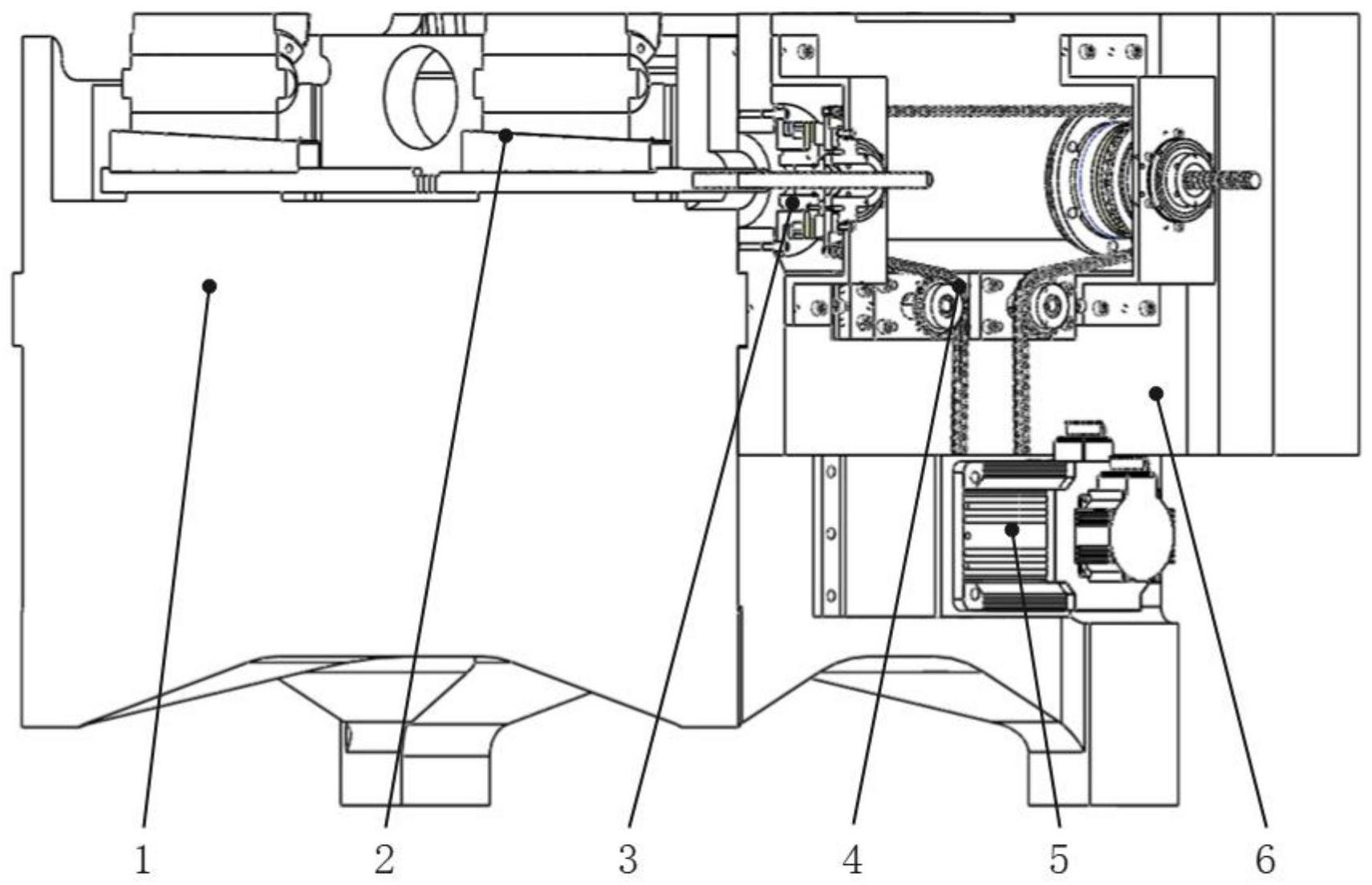
2、本发明的技术方案:一种具有制动保持功能的模切机动平台位移伺服调整机构,包括底座、位移调整机构、制动保持机构、动力传递系统、动力输入系统和机构固定墙板;所述底座的前端设置机构固定墙板和动力输入系统,所述机构固定墙板的两侧设置制动保持机构,制动保持机构的下方设置动力传递系统;所述底座的上端两侧设有位移调整机构,位移调整机构与对应的制动保持机构连接;所述底座中设有位于位移调整机构后端的非接触位移传感器;所述动力输入系统经动力传递系统与制动保持机构连接。
3、上述的具有制动保持功能的模切机动平台位移伺服调整机构,所述位移调整机构包括升降平台、调整楔块和楔块驱动杆;所述楔块驱动杆有两根,且对称分布在底座两侧的滑台中;所述楔块驱动杆端部与制动保持机构连接,所述楔块驱动杆上前后两侧分别固定设置调整楔块,调整楔块与升降平台接触连接,升降平台可相对调整楔块呈左右方向位移,可相对底座呈上下方向位移;所述非接触位移传感器在底座中朝向调整楔块设置。
4、前述的具有制动保持功能的模切机动平台位移伺服调整机构,所述调整楔块的斜角范围为2°-4°。
5、前述的具有制动保持功能的模切机动平台位移伺服调整机构,所述制动保持机构包括蝶形弹簧、制动器滑杆、制动器、调节螺母、调节丝杆、制动保持机构固定架和调节链轮支撑轴承组;所述蝶形弹簧套于制动器滑杆上,用于制动器的回弹;所述制动器通过制动器滑杆固定于机构固定墙板上,制动器可沿制动器滑杆左右位移;所述制动器的中部设置调节螺母,调节丝杆穿设在调节螺母中并与楔块驱动杆固定连接;所述制动器的前方设置制动保持机构固定架,制动保持机构固定架的上下两端分别固定于机构固定墙板上,制动保持机构固定架的中部与调节链轮支撑轴承组外环固定连接;所述调节链轮支撑轴承组内环与动力传递系统固定连接。
6、前述的具有制动保持功能的模切机动平台位移伺服调整机构,所述制动器包括外磁轭、ab胶、线圈、电枢、内磁轭制动盘、制动盘转子、隔角片和永磁体;所述制动盘转子与调节螺母固定连接;所述制动盘转子套设电枢,电枢内侧设置内磁轭制动盘,内磁轭制动盘套设线圈,线圈与外磁轭之间设置ab胶;所述线圈的一侧设置外磁轭;所述外磁轭与线圈之间设隔角片;所述外磁轭与内磁轭制动盘之间设置永磁体。
7、前述的具有制动保持功能的模切机动平台位移伺服调整机构,所述动力传递系统包括调节链轮、传动链条、张紧链轮、驱动链轮、张紧链轮调节块和调节固定块;所述调节链轮有两个,分别装配于机构固定墙板的两侧的制动保持机构内,并且调节链轮与调节丝杆螺母和调节链轮支撑轴承组内环固定连接;所述传动链条分别与调节链轮、张紧链轮、驱动链轮配合连接;所述张紧链轮通过固定轴和轴承固定于张紧链轮调节块上,所述张紧链轮调节块固定于机构固定墙板上;所述驱动链轮设置在动力输入系统的输出端;所述调节固定块固定于机构固定墙板上,并与张紧链轮调节块通过调节螺栓连接;
8、前述的具有制动保持功能的模切机动平台位移伺服调整机构,所述动力输入系统包括伺服电机和伺服电机固定座,所述伺服电机固定座设置在底座上,所述伺服电机设置在伺服电机固定座上,伺服电机的输出端与驱动链轮连接。
9、与现有技术相比,本发明的位移调整和制动保持机构配合非接触位移传感器,可及时反馈调整位移调整机构的位移量,从而得知伺服调节量。通过动力输入系统、非接触位移传感器形成一个动平台的位移伺服调节闭环系统,实现了动平台位移快速响应调节和精准调节;本发明应用了制动保持机构的制动保持,保证了每次调整后楔块的位置固定不变,避免了因压力过大而出现调整楔块与升降平台相对滑动的情况发生,实现动平台位移调整的稳定性和精确性,因此本发明能够在现有技术的基础上大幅提高调整的精准度。
技术特征:
1.一种具有制动保持功能的模切机动平台位移伺服调整机构,其特征在于:包括底座(1)、位移调整机构(2)、制动保持机构(3)、动力传递系统(4)、动力输入系统(5)和机构固定墙板(6);所述底座(1)的前端设置机构固定墙板(6)和动力输入系统(5),所述机构固定墙板(6)的两侧设置制动保持机构(3),制动保持机构(3)的下方设置动力传递系统(4);所述底座(1)的上端两侧设有位移调整机构(2),位移调整机构(2)与对应的制动保持机构(3)连接;所述底座(1)中设有位于位移调整机构(2)后端的非接触位移传感器(48);所述动力输入系统(5)经动力传递系统(4)与制动保持机构(3)连接。
2.根据权利要求1所述的具有制动保持功能的模切机动平台位移伺服调整机构,其特征在于:所述位移调整机构(2)包括升降平台(21)、调整楔块(22)和楔块驱动杆(23);所述楔块驱动杆(23)有两根,且对称分布在底座(1)两侧的滑台中;所述楔块驱动杆(23)端部与制动保持机构(3)连接,所述楔块驱动杆(23)上前后两侧分别固定设置调整楔块(22),调整楔块(22)与升降平台(21)接触连接,升降平台(21)可相对调整楔块(22)呈左右方向位移,可相对底座(1)呈上下方向位移;所述非接触位移传感器(48)在底座(1)中朝向调整楔块(22)设置。
3.根据权利要求2所述的具有制动保持功能的模切机动平台位移伺服调整机构,其特征在于:所述调整楔块(22)的斜角范围为2°-4°。
4.根据权利要求2所述的具有制动保持功能的模切机动平台位移伺服调整机构,其特征在于:所述制动保持机构(3)包括蝶形弹簧(31)、制动器滑杆(32)、制动器(33)、调节螺母(34)、调节丝杆(35)、制动保持机构固定架(36)和调节链轮支撑轴承组(37);所述蝶形弹簧(31)套于制动器滑杆(32)上,用于制动器(33)的回弹;所述制动器(33)通过制动器滑杆(32)固定于机构固定墙板(6)上,制动器(33)可沿制动器滑杆(32)左右位移;所述制动器(33)的中部设置调节螺母(34),调节丝杆(35)穿设在调节螺母(34)中并与楔块驱动杆(23)固定连接;所述制动器(33)的前方设置制动保持机构固定架(36),制动保持机构固定架(36)的上下两端分别固定于机构固定墙板(6)上,制动保持机构固定架(36)的中部与调节链轮支撑轴承组(37)外环固定连接;所述调节链轮支撑轴承组(37)内环与动力传递系统(4)固定连接。
5.根据权利要求4所述的具有制动保持功能的模切机动平台位移伺服调整机构,其特征在于:所述制动器(33)包括外磁轭(331)、ab胶(332)、线圈(333)、电枢(334)、内磁轭制动盘(335)、制动盘转子(336)、隔角片(337)和永磁体(338);所述制动盘转子(336)与调节螺母(34)固定连接;所述制动盘转子(336)套设电枢(334),电枢(334)内侧设置内磁轭制动盘(335),内磁轭制动盘(335)套设线圈(333),线圈(333)与外磁轭(331)之间设置ab胶(332);所述线圈的一侧设置外磁轭(331);所述外磁轭(331)与线圈之间设隔角片(337);所述外磁轭(331)与内磁轭制动盘(335)之间设置永磁体(338)。
6.根据权利要求4所述的具有制动保持功能的模切机动平台位移伺服调整机构,其特征在于:所述动力传递系统(4)包括调节链轮(41)、传动链条(42)、张紧链轮(43)、驱动链轮(44)、张紧链轮调节块(45)和调节固定块(46);所述调节链轮(41)有两个,分别装配于机构固定墙板(6)的两侧的制动保持机构(3)内,并且调节链轮(41)与调节丝杆螺母(34)和调节链轮支撑轴承组(37)内环固定连接;所述传动链条(42)分别与调节链轮(41)、张紧链轮(43)、驱动链轮(44)配合连接;所述张紧链轮(43)通过固定轴和轴承固定于张紧链轮调节块(45)上,所述张紧链轮调节块(45)固定于机构固定墙板(6)上;所述驱动链轮(44)设置在动力输入系统(5)的输出端;所述调节固定块(46)固定于机构固定墙板(6)上,并与张紧链轮调节块(45)通过调节螺栓连接。
7.根据权利要求6所述的具有制动保持功能的模切机动平台位移伺服调整机构,其特征在于:所述动力输入系统包括伺服电机(51)和伺服电机固定座(52),所述伺服电机固定座(52)设置在底座(1)上,所述伺服电机(51)设置在伺服电机固定座(52)上,伺服电机(51)的输出端与驱动链轮(44)连接。
技术总结
本发明公开了一种具有制动保持功能的模切机动平台位移伺服调整机构,包括底座、位移调整机构、制动保持机构、动力传递系统、动力输入系统和机构固定墙板;所述底座的前端设置机构固定墙板和动力输入系统,所述机构固定墙板的两侧设置制动保持机构,制动保持机构的下方设置动力传递系统;所述底座的上端两侧设有位移调整机构,位移调整机构与对应的制动保持机构连接;所述底座中设有位于位移调整机构后端的非接触位移传感器;所述动力输入系统经动力传递系统与制动保持机构连接。
技术研发人员:李勇,王境,陈贤,吴轶超,王桂贤
受保护的技术使用者:温州大学平阳智能制造研究院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!