切换焊枪方法、点焊机器人及存储介质与流程
本发明实施例涉及自动化,特别涉及一种切换焊枪方法、点焊机器人及存储介质。
背景技术:
1、随着点焊作业自动化和智能化水平的不断提升,点焊机器人的应用也越来越广泛。为了适应快速高效的生产线需求,实现同一工位的不同焊接工艺,研究点焊机器人的切换枪系统变得尤为重要。切换枪系统是点焊机器人系统中重要组成部分,对整个工序的影响较大,快速的切换枪能够节省等待的时间,在提升效率方面发挥着重要作用。
2、发明人发现,目前点焊机器人的快换功能主要借助换枪盘实现,通过机器人系统控制给焊枪的信号和供电的通断,再控制换枪盘的对焊枪的脱合,从而实现机器人本体和焊枪之间的脱合。此种方式同时只能使用一把焊枪,当需要更换工艺时,只能通过换枪盘换枪后继续点焊作业。在需要频繁切换焊枪的工作场景中,不利于点焊枪的稳定工作,影响焊枪焊接效率。
技术实现思路
1、本发明实施方式的目的在于提供一种切换焊枪方法、点焊机器人及存储介质,使得可以通过切换点焊设备或切换点焊设备的当前焊枪,达到快速切换焊枪的目的,从而提高切换焊枪的效率。
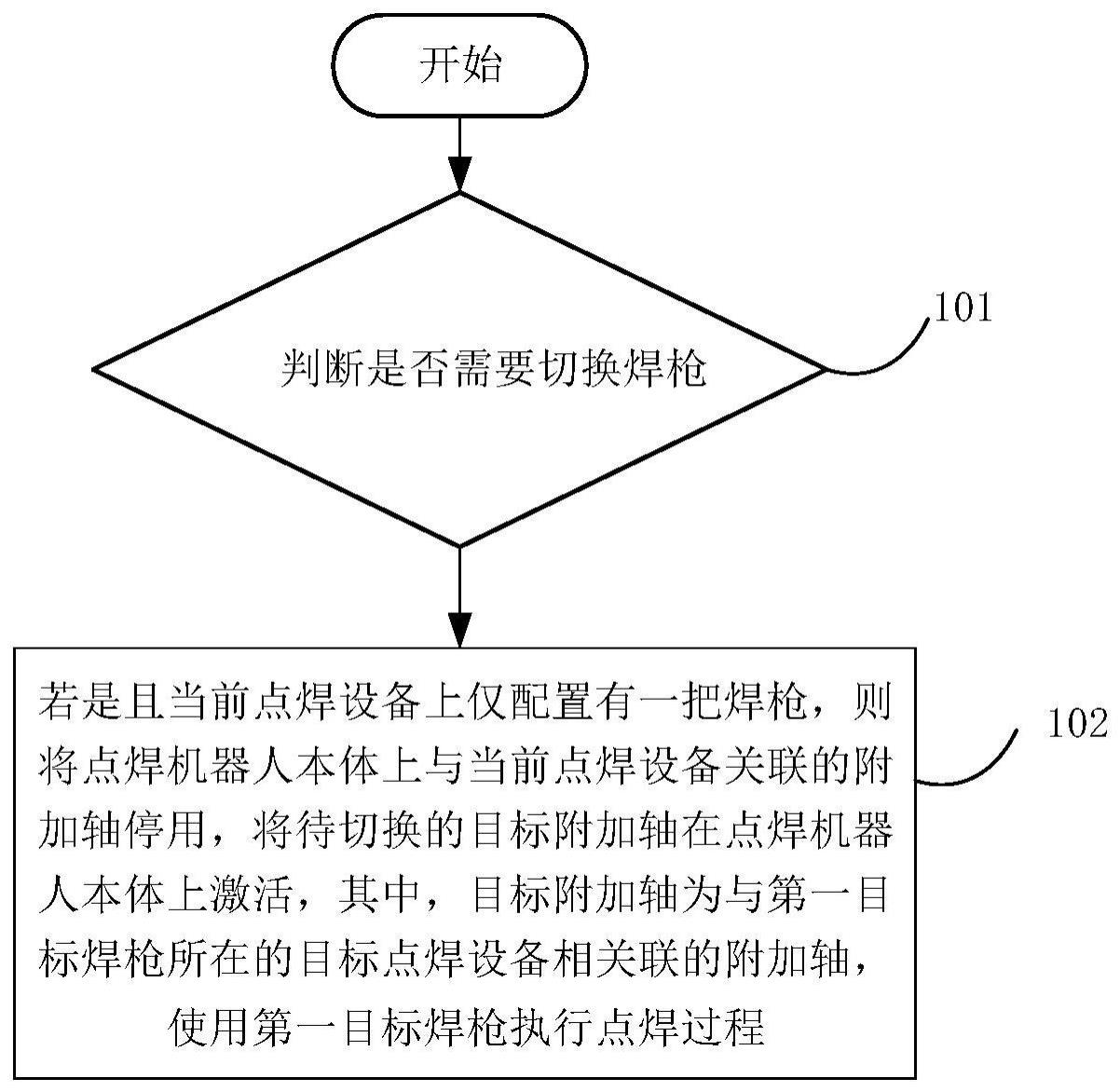
2、为解决上述技术问题,本发明的实施方式提供了一种切换焊枪方法,包括,所述方法应用于点焊机器人,所述点焊机器人包括:机器人本体、安装在所述机器人本体上的点焊设备、与所述点焊设备关联的附加轴,以及设置在所述点焊设备上的焊枪;其中,所述附加轴用于将关联的所述点焊设备安装在所述机器人本体上;所述方法包括:判断是否需要切换所述焊枪;若是且所述当前点焊设备上仅配置有一把所述焊枪,则将所述点焊机器人本体上与当前点焊设备关联的附加轴停用,将待切换的目标附加轴在所述点焊机器人本体上激活,其中,所述目标附加轴为与第一目标焊枪所在的所述目标点焊设备相关联的所述附加轴,使用所述第一目标焊枪执行点焊过程。
3、本发明的实施方式还提供了一种点焊机器人,包括:机器人本体、安装在所述机器人本体上的点焊设备、与所述点焊设备关联的附加轴,以及设置在所述点焊设备上的焊枪;其中,所述附加轴用于将关联的所述点焊设备安装在所述机器人本体上;所述机器人本体上设置有至少一个处理器和与所述至少一个处理器通信连接的存储器;所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行上述的切换焊枪方法。
4、本发明的实施方式还提供了一种计算机可读存储介质,存储有计算机程序,所述计算机程序被处理器执行时实现上述的切换焊枪方法。
5、本发明实施方式相对于相关技术而言,所述切换焊枪方法应用于点焊机器人,点焊机器人包括:机器人本体、安装在机器人本体上的点焊设备、与点焊设备关联的附加轴,以及设置在点焊设备上的焊枪;其中,附加轴用于将关联的点焊设备安装在所述机器人本体上;所述方法包括:判断是否需要切换所述焊枪;若是,则将点焊机器人本体上与当前点焊设备关联的附加轴停用,将待切换的目标附加轴在点焊机器人本体上激活,其中,所述目标附加轴为与第一目标焊枪所在的点焊设备相关联的所述附加轴,使用第一目标焊枪执行点焊过程。使得可以通过切换点焊设备或切换点焊设备的当前焊枪,达到快速切换焊枪的目的,从而提高切换焊枪的效率。
6、另外,所述方法还包括:在判定需要切换所述焊枪,且所述当前点焊设备上设置有两把所述焊枪时;将安装在所述当前点焊设备的切换前的所述焊枪的信息保存至所述点焊机器人;将另一把所述焊枪的信息在所述当前点焊设备上激活,使用所述另一把焊枪执行点焊过程。有利于在一个点焊设备内实现快速切换焊枪。
7、另外,所述焊枪的信息为焊枪脱枪时的零点位置及角度。有利于点焊机器人快速执行切换焊枪的动作。
8、另外,所述方法还包括:在所述目标点焊设备上安装有多把所述焊枪,且所述第一目标焊枪不是所述目标点焊设备当前使用的焊枪的情况下,在所述将待切换的目标附加轴在所述点焊机器人本体上激活后,将所述第一目标焊枪切换为所述目标点焊设备当前使用的焊枪。
9、另外,所述点焊机器人的本体上设置有至少两个点焊设备,每个所述点焊设备上配置有至少一把焊枪。
10、另外,所述方法还包括:在运行所述点焊机器人之前,在所述点焊机器人的本体上安装所述点焊设备,将每个所述点焊设备与每个所述附加轴进行关联,在每个所述点焊设备上设置所述点焊设备的所述当前焊枪。有利于在复杂工况的情况下完成点焊设备内切换焊枪。
11、另外,所述在每个所述点焊设备上设置该所述点焊设备的所述当前焊枪,具体包括:当所述点焊设备上配置有至少两把所述焊枪时,仅选择一把焊枪作为安装在所述点焊设备上的所述当前使用焊枪;当所述点焊设备上设置有一把所述焊枪时,将该所述一把焊枪作为安装在所述点焊设备上的所述当前焊枪。将每个设备安装一个当前使用焊枪,有利于实现快速切换焊枪。
技术特征:
1.一种切换焊枪方法,其特征在于,应用于点焊机器人,所述点焊机器人包括:机器人本体、安装在所述机器人本体上的点焊设备、与所述点焊设备关联的附加轴,以及设置在所述点焊设备上的焊枪;其中,所述附加轴用于将关联的所述点焊设备安装在所述机器人本体上;
2.根据权利要求1所述的切换焊枪方法,其特征在于,所述方法还包括:
3.根据权利要求2所述的切换焊枪方法,其特征在于,所述焊枪的信息为焊枪脱枪时的零点位置及角度。
4.根据权利要求1所述的切换焊枪方法,其特征在于,所述方法还包括:
5.根据权利要求1-4任一项所述的切换焊枪方法,其特征在于,所述点焊机器人的本体上设置有至少两个点焊设备,每个所述点焊设备上配置有至少一把焊枪。
6.根据权利要求1所述的切换焊枪方法,其特征在于,所述方法还包括:
7.根据权利要求6所述的切换焊枪方法,其特征在于,所述在每个所述点焊设备上设置该所述点焊设备的所述当前焊枪具体包括:
8.一种点焊机器人,其特征在于,包括:机器人本体、安装在所述机器人本体上的点焊设备、与所述点焊设备关联的附加轴,以及设置在所述点焊设备上的焊枪;其中,所述附加轴用于将关联的所述点焊设备安装在所述机器人本体上;
9.一种计算机可读存储介质,存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7中任一项所述的切换焊枪方法。
技术总结
本发明实施例涉及自动化技术领域,特别涉及一种切换焊枪方法、点焊机器人及存储介质。切换焊枪方法应用于点焊机器人,点焊机器人包括:机器人本体、点焊设备、与点焊设备关联的附加轴,以及设置在点焊设备上的焊枪;其中,附加轴用于将关联的点焊设备安装在所述机器人本体上;所述方法包括:判断是否需要切换所述焊枪;若是,则将点焊机器人本体上与当前点焊设备关联的附加轴停用,将待切换的目标附加轴在点焊机器人本体上激活,其中,目标附加轴为与第一目标焊枪所在的点焊设备相关联的附加轴,使用第一目标焊枪执行点焊过程。使得可以通过切换点焊设备或切换点焊设备的当前焊枪,达到快速切换焊枪的目的,从而提高切换焊枪的效率。
技术研发人员:倪博文,李大新,李潜,张慧,张彭洋
受保护的技术使用者:上海新时达机器人有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!